基于模糊ARTMAP神經網絡農用汽車助力轉向系統控制
2015-11-28 05:17:10王玲
山東農業大學學報(自然科學版) 2015年3期
王玲
陜西職業技術學院,陜西西安710100
基于模糊ARTMAP神經網絡農用汽車助力轉向系統控制
王玲
陜西職業技術學院,陜西西安710100
針對農用汽車電動助力轉向系統非線性較強、穩定性較差等問題,基于模糊ARTMAP神經網絡,建立農用汽車電動助力轉向系統控制模型,對電動助力轉向系統中的驅動力矩和助力力矩進行控制,利用matlab仿真軟件進行分析。分析結果表明,隨著驅動力矩的增加,助力力矩逐漸增加,但是增加的趨勢先增加后減小;驅動和助力力矩的目標值與仿真值在仿真初期存在一定的差異,隨著時間的增加,兩者差異逐漸減小直至為零;設計的基于模糊ARTMAP神經網絡的控制系統,控制精度較高,穩定性較好,可以滿足要求。
模糊ARTMAP神經網絡;農用汽車;助力轉向系統;控制
隨著能源的日益緊缺和大氣環境的不斷惡化,以零污染排放且不依賴石油能源等雙重優點的純電動汽車成為了國內外學者的研究熱點,電動助力轉向(EPS)作為電動汽車一個重要系統之一較傳統液壓助力轉向具有更好的助力特性和燃油經濟性,因而有逐漸替代液壓助力轉向的趨勢。汽車電動助力轉向可以根據行駛工況改變轉向傳動比,從而提高汽車的操縱穩定性。隨著黨和國家領導人對農業問題的重視及社會的不斷發展,農業機械化是個必然的趨勢,基于此,對農業機械的研究也逐漸成為一個重要的趨勢[1,2]。
國內外眾多學者對電動汽車及其各系統進行了相關的研究。其中,于蕾艷等[3]對汽車線控轉向系統動力學進行分析,并基于神經網絡非線性模型對線控轉向系統控制算法進行了研究;王軍年等[4]基于AMESim軟件建立了四輪獨立驅動電動汽車動力學仿真模型,對模型進行聯合仿真并進行試驗驗證;郝亮等[5]在介紹EPS結構和工作原理的基礎上,對EPS的核心組成部分(ECU)的控制方法與優化進行研究;裴學杰等[6]在分析了電動助力轉向系統各組成部分數學模型的基礎上,構建了基于Simulink與carsim的動助力轉向系統仿真模,對電動助力轉向系統助力特性進行了研究;R.Chabaan[7]對電動力轉向系統的增益調度和最優控制進行了分析。
雖然國內外眾多學者對汽車及其各系統進行了相關的研究,但對于EPS控制的研究相對較少,再加之EPS控制系統非常復雜。因此,針對農用汽車電動助力轉向系統非線性較強、穩定性較差等問題,本文基于模糊ARTMAP神經網絡,建立農用汽車電動助力轉向系統控制模型,對電動助力轉向系統中的驅動力矩和助力力矩進行控制,為后續農用汽車電動助力轉向系統的控制研究和穩定性的提高提供一定的參考。
1 農用汽車電動助力轉向系統組成及非線性模型
農用汽車電動助力轉向系統(EPAS)是一個反饋控制系統,其通過電荷放大器將駕駛員方向盤的轉向力矩輸入給車輛,從而提高駕駛員的舒適性和操作穩定性。EPAS由方向盤、轉向柱、減速機構、助力電動機和齒輪齒條轉向器等主要機構組成如圖1所示。
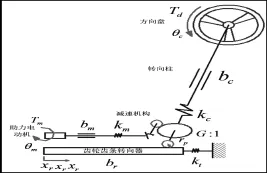
圖1 電動助力轉向系統結構及模型Fig.1 Structure and model of electric power steering system
根據圖1所示模型,建立3自由度的EPAS非線性模型為:

式中:Td、Tm分別為駕駛員驅動力矩和助力電機力矩;kc為轉向柱剛度;bc為轉向柱阻尼;km為電機和減速器系統扭轉剛度;Jm為電機轉動慣量;Jc為轉向柱轉動慣量;bm為電機和減速器系統阻尼;m為齒輪齒條轉向器質量;br為齒條阻尼;G為減速比;rp為齒輪半徑;kt為車輪彈簧剛度;θc為轉向柱轉角;為轉向柱角速度;xr為齒條位移;為齒條線速度;θm為助力電機轉角;為助力電機角速度;fc、fr、fm為非線性摩擦模型。
2 模糊ARTMAP神經網絡模型
模糊ARTMAP(Fuzzy Adaptive Resonance Theory Map)根據模糊子集計算和ART神經網絡類別選擇方法中的形式相似性,同時結合了ART和模糊邏輯的優點。模糊ARTMAP神經網絡系統由兩個模糊ART[8]模型構成,即ARTa和ARTb,它們由一個內部ART模型連接,也叫映射域,其邏輯結構圖如圖2所示。
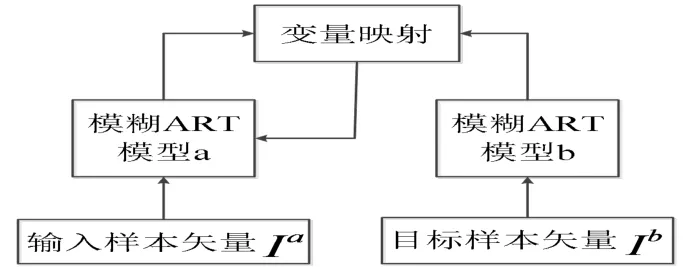
圖2 模糊ARTMAP神經網絡邏輯結構Fig.2 Fuzzy ARTMAP neural network logic
2.1 輸入矢量預處理
模糊ARTa模型接受電動助力轉向系統的輸入信號并進行分類,若待分類為N維樣本,分類后有M個類別。設輸入ARTa的樣本矢量為:。對a進行互補編碼歸一化,可以得到:。對每個輸入,恒有:。
目標樣本ARTb的輸入矢量為:,且。對b作互補編碼歸一化得到目標樣本ARTb的輸入B。矢量a、b一般成對輸入。
2.2 初始化網格
對ARTa用表示F1a的輸出矢量,表示F2a的輸出矢量,表示第J類在ARTa中的權重矢量。同理可得,對ARTb用表示F1b的輸出矢量,表示F2b的輸出矢量,表示第K類在ARTb中的權重矢量。對映射。對映射域abF,一般用表示abF的輸出矢量,用表示的第J個節點到Fab的權重矢量。
模糊ARTMAP神經網絡的初始化包括設置選擇參數α>0、學習速率參數、警戒門限參數、匹配跟蹤參數ε(的值很小),設置權重矢量初始值為:

2.3 搜索獲勝節點和判斷諧振狀態
對于每個輸入矢量I(由A和B組成),其在F2層節點j的輸出值,可以通過相關的函數計算得到,其計算函數為:

選擇在F2層競爭獲勝節點的函數為:

選擇的類別被標識為J,如果有多個Tj同時為最大值,則選擇索引最小的類別。如果

同時成立的時,說明此時的節點J競爭獲勝并發生匹配諧振,則可以得到;當式(5)不成立時,則該節點復位,即abbx=y,再在剩下的其他節點中繼續收索獲勝節點,進而對其諧振狀態進行判斷;當式(5)成立,而式(6)不成立時,則匹配跟蹤開始,aρ在的基礎上增加匹配跟蹤參數ε,同時在新的警戒參數下,繼續在F2a中搜索獲勝節點,如果經過反復循環依然沒有找到這樣的獲勝節點,則關閉F2a對輸入描述的記憶,在輸入端饋入下一個輸入模式。
2.4 學習更新權值矢量


3 仿真結果與分析
根據上文建立的控制模型,利用matlab仿真軟件進行分析,仿真分析結果如下文所示。
圖3為助力力矩與驅動力矩之間的關系曲線。由圖3可以看出,隨著驅動力矩的增加,助力逐漸增加,但是增加的趨勢先增加后減小。
圖4為不同速度下助力力矩與驅動力矩之間的關系曲線。由圖4可以看出,在不同的速度下,隨著驅動力矩的增加,助力逐漸增加,但是增加的趨勢先增加后減小。當車速為v=60 mph時,增加趨勢最小;車速為4 mph<v<30 mph時,其增加趨勢大于車速v=60 mph;車速為v=4 mph時,其增加趨勢大于車速4 mph<v<30 mph;當車速為v>60 mph時,增加趨勢最大且變化也較大。
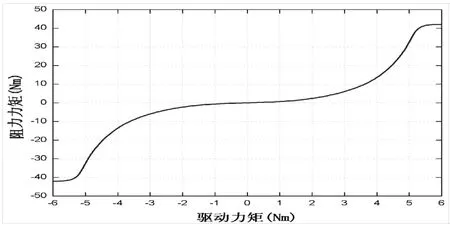
圖3 助力與驅動力矩曲線Fig.3 Curve of power steering torque and drive torque
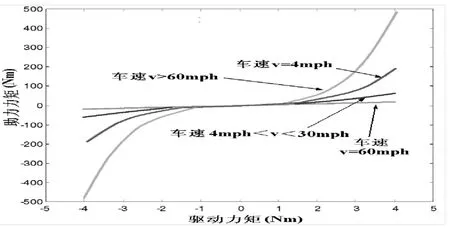
圖4 不同速度下助力與驅動力矩曲線Fig.4 Curves of power steering torque and drive torque at different speeds
圖5為驅動力矩仿真值。由圖5可以看出,驅動力矩的目標值與仿真值在0到2 s存在一定的差異,隨著時間的增加,兩者差異逐漸減小直至為零,說明本文設計的基于模糊ARTMAP神經網絡的控制系統,控制精度較高,穩定性較好,可以滿足要求。
圖6為助力力矩仿真值。由圖6可以看出,助力力矩的目標值與仿真值在0到8 s存在一定的差異,隨著時間的增加,兩者差異逐漸減小直至為零,說明本文設計的基于模糊ARTMAP神經網絡的控制系統,控制精度較高,穩定性較好,可以滿足要求。
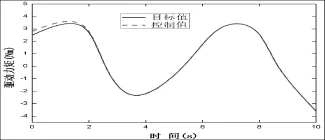
圖5 驅動力矩仿真值Fig.5 Simulation values of driving torque
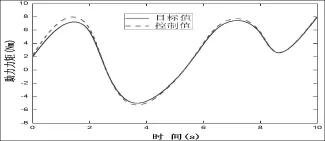
圖6 助力力矩仿真值Fig.6 Simulation values of power steering torque
4 結論
本文基于模糊ARTMAP神經網絡,建立農用汽車電動助力轉向系統控制模型,對電動助力轉向系統中的驅動力矩和助力力矩進行控制,利用matlab仿真軟件進行分析,分析結果表明:
(1)隨著驅動力矩的增加,助力逐漸增加,但是增加的趨勢先增加后減小;
(2)驅動和助力力矩的目標值與仿真值在仿真初期存在一定的差異,隨著時間的增加,兩者差異逐漸減小直至為零;
(3)設計的基于模糊ARTMAP神經網絡的控制系統,控制精度較高,穩定性較好,可以滿足要求。
[1]蔣家榮.淺析影響農用汽車操縱穩定性的因素及評價方法[J].安徽農學通報,2011,10:209-210
[2]侯南,張文多.農用汽車動力電池故障診斷系統的探索與研究[J].農機化研究,2013,11:24
[3]于蕾艷,伊劍波,鮑長勇.基于神經網絡非線性模型的線控轉向系統控制[J].拖拉機與農用運輸車,2014,41(2):37-40
[4]王軍年,王慶年,宋傳學,等.四輪驅動電動汽車差動助力轉向系統聯合仿真與試驗[J].農業機械學報,2010,41(6):7-13,30
[5]郝亮,孫劍,郭濤,等.汽車EPS控制策略和控制方式[J].汽車工程師,2014,5:20-23
[6]裴學杰,楊世文,季茜.電動助力轉向系統助力特性研究[J].汽車實用技術,2014,3:51-53
[7]Chabaan R.Optimal Control and Gain Scheduling of Electrical Power Steering Systems[C]//IEEE Vehicle Power and Propulsion Conference,Dearborn,MI,2009
[8]Gail A C,Stephen G,David B R.Fuzzy ART:Fast Stable Learning and Categorization of Analog Patterns by an Adaptive Resonance System[J].NeuralNetworks,1991(4):759-771
Control of Power Steering Systems ofAgricultural Vehicles Based on Fuzzy ARTMAPNeural Network
WANG Ling
Shanxi Vocational and Technical College,Xi'an 710100,China
For the problems of nonlinear,the poor stability of electric power steering system of agricultural vehicle,the control model of the electric power steering system of agricultural vehicle was established based on the fuzzy ARTMAP neural network to control the torque of driving torque and power steering torque,the analysis was used by matlab simulation software.The analysis results show that with the increase of the driving torque,power steering torque increase gradually,but the increase trend of first increases then decreases;the target value and simulation value of driving torque and power steering torque at the beginning has certain differences,with the increase of time,both difference decreases to zero;design of control system based on fuzzy ARTMAP neural network of high control precision,good stability can meet the requirements.
Fuzzy ARTMAP neural network;agricultural vehicles;power steering systems;control
U469.79
A
1000-2324(2015)03-0418-04
2013-04-12
2013-04-28
王玲(1977-),女,漢族,陜西省西安市人,電路與系統,碩士,講師,研究方向:嵌入式技術應用.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年17期)2017-09-08 13:08:58
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
