基于慣導(dǎo)系統(tǒng)的船載雷達(dá)大盤不水平動(dòng)態(tài)標(biāo)定方法
2015-11-26 09:06:44王玉帥王省書鄭佳興
中國(guó)科技信息 2015年22期
王玉帥 王省書 鄭佳興
基于慣導(dǎo)系統(tǒng)的船載雷達(dá)大盤不水平動(dòng)態(tài)標(biāo)定方法
王玉帥 王省書 鄭佳興
本文提出了一種動(dòng)態(tài)條件下通過船載慣導(dǎo)系統(tǒng)標(biāo)定雷達(dá)大盤不水平的方法, 從理論上建立模型,并通過仿真進(jìn)行了分析。分析結(jié)果表明:利用慣導(dǎo)系統(tǒng)進(jìn)行海上動(dòng)態(tài)標(biāo)定可在一定程度上隔離海上動(dòng)態(tài)環(huán)境對(duì)雷達(dá)標(biāo)定的影響,并且有較高的精度。
雷達(dá)的大盤即方位轉(zhuǎn)盤,是垂直于方位轉(zhuǎn)軸的平面,是看不見摸不著的數(shù)學(xué)平面。根據(jù)大盤面的定義,方位軸的指向與甲板平面垂直方向的夾角即為大盤的不水平度。理想狀態(tài)下,雷達(dá)對(duì)目標(biāo)進(jìn)行跟蹤測(cè)量時(shí),機(jī)械軸以船體坐標(biāo)系為基準(zhǔn),以電軸對(duì)準(zhǔn)目標(biāo),伺服系統(tǒng)的光軸、電軸、機(jī)械軸三軸重合,實(shí)現(xiàn)高精度測(cè)量。雷達(dá)的大盤不水平誤差,將導(dǎo)致雷達(dá)三軸不再重合,需要進(jìn)行誤差測(cè)量及補(bǔ)償。
雷達(dá)大盤不水平將直接影響雷達(dá)的測(cè)量精度,然而,船舶在海上受風(fēng)浪等環(huán)境因素影響而晃動(dòng),不利于雷達(dá)誤差的檢測(cè)。船載雷達(dá)一般通過塢內(nèi)標(biāo)校對(duì)各項(xiàng)誤差參數(shù)進(jìn)行系統(tǒng)的標(biāo)定,平時(shí)很難對(duì)雷達(dá)進(jìn)行高精度且全面的標(biāo)定,特別是在海上動(dòng)態(tài)條件下。由于參數(shù)可能會(huì)在一定范圍內(nèi)變化,塢內(nèi)標(biāo)校是不可能經(jīng)常進(jìn)行的,組織實(shí)施難度大、周期長(zhǎng)、成本高。目前能在海上動(dòng)態(tài)條件下對(duì)雷達(dá)進(jìn)行標(biāo)校的方法較少,而且都有一定的局限性。在海上動(dòng)態(tài)標(biāo)校的誤差參數(shù)主要是雷達(dá)的軸系誤差參數(shù)。國(guó)內(nèi)的標(biāo)定方法主要有標(biāo)定球法和基于恒星測(cè)量的標(biāo)定方法。標(biāo)定球法的誤差較大,而國(guó)外有些國(guó)家已經(jīng)使用衛(wèi)星標(biāo)定方法,但在國(guó)內(nèi)還處于起步階段。
慣性導(dǎo)航系統(tǒng)是一種推算導(dǎo)航系統(tǒng),利用陀螺儀和加速度計(jì)測(cè)量載體的角速度和速度,經(jīng)過積分運(yùn)算得到載體當(dāng)前的姿態(tài)、速度和位置。本文基于慣導(dǎo)系統(tǒng)本身可以測(cè)量載體轉(zhuǎn)動(dòng)信息的特點(diǎn),嘗試?yán)脩T導(dǎo)系統(tǒng),對(duì)雷達(dá)的大盤不水平進(jìn)行海上動(dòng)態(tài)標(biāo)校。
利用慣導(dǎo)系統(tǒng)測(cè)量雷達(dá)誤差的原理及方法
本文所述方法是將慣導(dǎo)系統(tǒng)捷聯(lián)安裝于雷達(dá)天線的俯仰軸上,以艦船自身的高精度的慣導(dǎo)系統(tǒng)作為主慣導(dǎo),以捷聯(lián)安裝于雷達(dá)上的慣導(dǎo)系統(tǒng)作為子慣導(dǎo)。雷達(dá)在轉(zhuǎn)動(dòng)時(shí),通過對(duì)主慣導(dǎo)給出艦船在海上動(dòng)態(tài)條件下的姿態(tài)變化和子慣導(dǎo)系統(tǒng)輸出的角運(yùn)動(dòng)參數(shù)進(jìn)行解算,可得到雷達(dá)的轉(zhuǎn)動(dòng)信息,然后進(jìn)一步計(jì)算出大盤不水平誤差。
測(cè)量原理
將子慣導(dǎo)系統(tǒng)捷聯(lián)安裝于雷達(dá)的俯仰軸上,安裝方法如圖1所示。控制雷達(dá)的俯仰軸不動(dòng),旋轉(zhuǎn)雷達(dá)的方位軸,在旋轉(zhuǎn)的時(shí)間內(nèi),將得到主子慣導(dǎo)的兩套輸出數(shù)據(jù),主慣導(dǎo)輸出的參數(shù)為艦船在海上動(dòng)態(tài)條件下的姿態(tài)變化,子慣導(dǎo)輸出的參數(shù)為在艦船搖擺的前提下雷達(dá)的轉(zhuǎn)動(dòng)信息。根據(jù)主子慣導(dǎo)輸出的姿態(tài)矩陣可以通過計(jì)算隔離艦船搖擺帶來的測(cè)量誤差,計(jì)算雷達(dá)方位轉(zhuǎn)軸相對(duì)于甲板坐標(biāo)系的指向。將代表方位軸指向的矢量投影到艦船主慣導(dǎo)的載體坐標(biāo)系內(nèi),就可以得到大盤不水平度的最大傾斜角度。
誤差測(cè)量模型
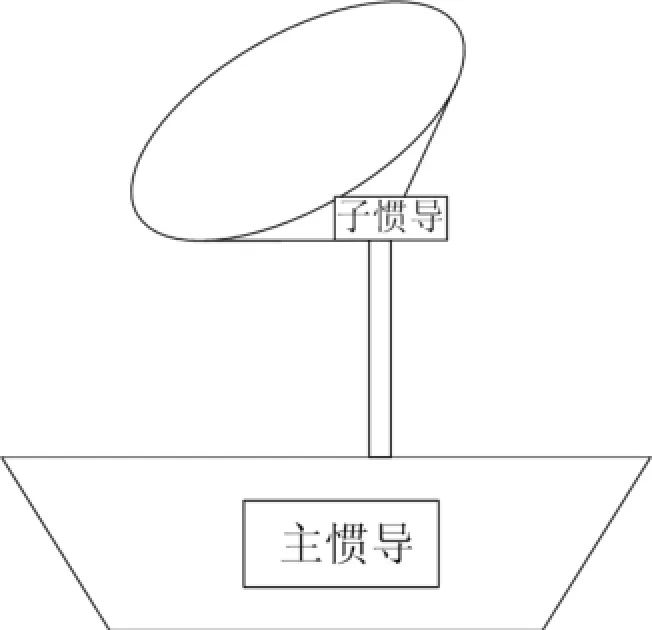
圖1 慣導(dǎo)單元安裝示意圖
設(shè)實(shí)際導(dǎo)航參考坐標(biāo)系為n,即當(dāng)?shù)氐乩碜鴺?biāo)系,B為主慣導(dǎo)載體坐標(biāo)系,即甲板坐標(biāo)系,b為子慣導(dǎo)載體坐標(biāo)系,即雷達(dá)坐標(biāo)系。在一定時(shí)間內(nèi),可以將主子慣導(dǎo)的姿態(tài)誤差角視為常量。主子慣導(dǎo)每隔一定的時(shí)間將計(jì)算出一個(gè)代表該時(shí)間段內(nèi)載體姿態(tài)變化信息的姿態(tài)矩陣,計(jì)算出的姿態(tài)矩陣信息如表所示。

表1 姿態(tài)矩陣
可以通過T1時(shí)刻主子慣導(dǎo)的姿態(tài)矩陣求出T1時(shí)刻B系相對(duì)于b系的姿態(tài)矩陣為:

姿態(tài)矩陣為慣導(dǎo)系統(tǒng)計(jì)算得到的,帶有一定誤差,其中:
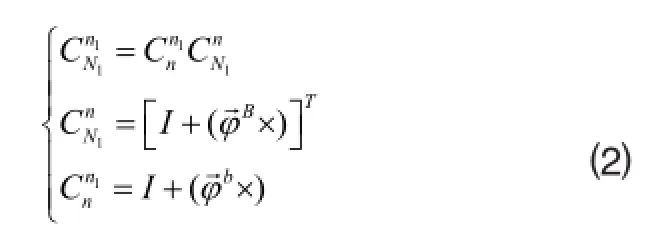
在方程組(2)中,n為實(shí)際導(dǎo)航參考坐標(biāo)系,n1為T1時(shí)刻子慣導(dǎo)計(jì)算得到的參考坐標(biāo)系,N1為T1時(shí)刻主慣導(dǎo)計(jì)算得到的參考坐標(biāo)系。φ→B為主慣導(dǎo)的姿態(tài)誤差角,φ→b為子慣導(dǎo)的姿態(tài)誤差角。
將方程組(2)帶入式(1),得到:

同理,T2時(shí)刻主子慣導(dǎo)的姿態(tài)矩陣計(jì)算得到的T2時(shí)刻B系相對(duì)于b系的姿態(tài)矩陣為:

此時(shí),雷達(dá)坐標(biāo)系b相對(duì)于甲板坐標(biāo)系B的旋轉(zhuǎn)矢量就是表示雷達(dá)方位軸轉(zhuǎn)動(dòng)的矢量,因此,以B系作為參考坐標(biāo)系,可以得到下式:

將式(3)和式(4)帶入式(5),得到:

由下式:



以上推導(dǎo)過程中,存在引起誤差的慣導(dǎo)姿態(tài)誤差角。
仿真結(jié)果及分析
仿真環(huán)境
船體搖擺采用某艦船在海上航行時(shí)慣導(dǎo)系統(tǒng)的實(shí)測(cè)數(shù)據(jù),設(shè)置艦船主慣導(dǎo)的姿態(tài)誤差角(單位角秒/″)為
φ= [10′;10′;20′],設(shè)置子慣導(dǎo)的姿態(tài)誤差角為φ =[30′;30′;60′],雷達(dá)方位軸以6度每秒的速度轉(zhuǎn)動(dòng)360°,時(shí)長(zhǎng)1min。
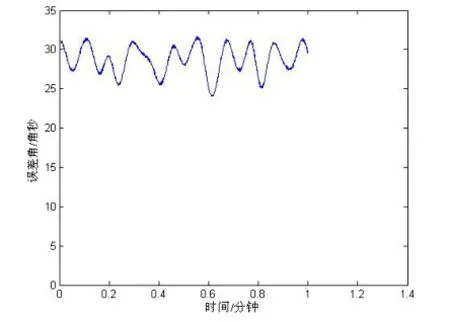
圖2 雷達(dá)方位軸指向與真值的夾角
仿真結(jié)果
為了方便觀察由于主子慣導(dǎo)系統(tǒng)的姿態(tài)誤差角引起的解算誤差,仿真過程中設(shè)置的大盤不水平度最大傾斜角真值為0,即指向甲板坐標(biāo)系的z軸正方向。圖2為仿真結(jié)果。
仿真結(jié)果分析
當(dāng)仿真中加入主子慣導(dǎo)的姿態(tài)誤差角時(shí),旋轉(zhuǎn)矢量與z軸正方向有了一定的偏離。經(jīng)過計(jì)算,給出仿真結(jié)果,如圖2。可以看出解算得到大盤不水平度的誤差角在24角秒到32角秒之間波動(dòng),這個(gè)誤差角是由于主子慣導(dǎo)系統(tǒng)的姿態(tài)誤差角引起的。當(dāng)使用較為先進(jìn)的基于恒星測(cè)量的船載雷達(dá)軸系誤差標(biāo)定方法時(shí),對(duì)大盤不水平度標(biāo)定的誤差可以控制在40到50角秒 ,本文使用的方法在理論上可以將誤差控制在較低的數(shù)值,因此理論上可應(yīng)用于大盤不水平度海上動(dòng)態(tài)標(biāo)定。
結(jié)束語
目前,對(duì)于利用慣導(dǎo)對(duì)雷達(dá)的大盤不水平進(jìn)行海上動(dòng)態(tài)標(biāo)校在理論上是可行的。本方法不依賴于外界信息,只利用慣導(dǎo)產(chǎn)生的數(shù)據(jù)進(jìn)行解算,一定程度上降低了海上動(dòng)態(tài)條件對(duì)標(biāo)校的影響。但是慣導(dǎo)系統(tǒng)本身的精度對(duì)測(cè)量解算的結(jié)果有著直接的影響。

王玉帥 王省書 鄭佳興
國(guó)防科學(xué)技術(shù)大學(xué)光電科學(xué)與工程學(xué)院光學(xué)工程系
10.3969/j.issn.1001-8972.2015.07.001
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
