激光距離選通成像門寬對圖像信噪比影響
2015-11-26 07:57:10王銳
中國光學 2015年6期
關鍵詞:系統
王 銳
(1.激光與物質相互作用國家重點實驗室,吉林長春130033;2.中國科學院長春光學精密機械與物理研究所,吉林長春130033)
1 引言
自激光成像技術產生以來,人們一直在尋求一種新型的探測成像技術,相對傳統的微波雷達探測而言,激光探測具有分辨率高、體積小巧、抗干擾力強和適用范圍廣等優點。相對于紅外熱成像技術,激光成像技術不受周圍環境溫度影響,對比度穩定,在天氣條件惡劣、低照度、背景復雜的條件下,仍然能獲取目標的強度像和距離像,并且還可以生成高分辨率的三維圖像[1]。
20世紀90年代以來,為克服大氣后向散射影響、提高系統作用距離。歐美等發達國家開始重視距離選通技術的研究,該項技術是解決遠距離激光主動成像散射噪聲問題的主要技術手段。許多國外科研機構,如瑞典國防研究中心(FOI)[2]、英國 BAE 公司[3]、美國 INTEVAC 公司[4]和 Goodrich 公司 SUI小組[5]、加拿大 OBZERV公司[6]、德國光電與模式識別研究所(Research institute for optronics and pattern recognition)[7]等,都對該技術進行了深入研究,而且部分裝備已研制成功。
早期的激光距離選通成像系統更加關注選通門寬,希望通過更小的門寬獲得更加精確的特定距離圖像信息,更好地抑制大氣后向散射噪聲[8]。但同時,小的門寬意味著更加嚴格的測距精度[9],限制了激光距離選通成像系統應用范圍。
本文為了明確選通門寬與圖像信噪比關系,設計并構建了外場實驗系統,獲得了豐富的實驗數據,并分析不同門寬條件下的圖像效果,證明了距離選通成像系統對選通門寬的要求并不嚴格,完全符合實際應用的需求。
2 距離選通成像工作原理
距離選通技術是借助精確時鐘同步技術、大功率脈沖激光驅動技術、選通增強攝像機(ICCD)等發展起來的。圖1為距離選通技術原理圖。脈沖激光和選通攝像機通過控制電路同步。在ta時刻,激光光源發射激光脈沖,選通攝像機關閉。在激光脈沖傳輸到達目標并反射回選通攝像機所處位置(tb時刻)之前,選通攝像機保持關閉。這樣ta到tb時刻脈沖激光傳輸過程中產生的后向散射光無法進入選通攝像機形成噪聲。當反射回的脈沖激光到達選通攝像機所處位置(tb時刻)時,選通攝像機打開,接收返回的脈沖激光并成像。而后重復這一過程,關閉攝像機,并發射下一個激光脈沖。這樣形成的目標圖像主要與距離選通時間內的目標反射光有關[3]。如果選通門開啟時間長度和激光脈寬都很窄,使得成像系統只接收目標附近的反射光信號,消除大部分的后向散射光,就能大大提高系統的成像對比度。距離選通成像方式可以選擇成像距離并控制成像景深,可以抑制后向散射,能夠在薄霧、雨、雪等惡劣天氣條件下成像。
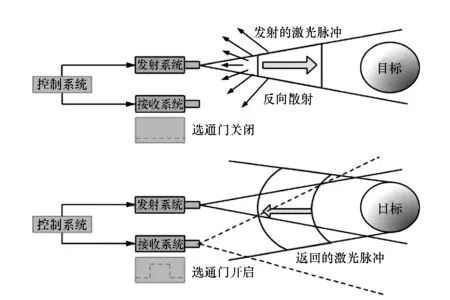
圖1 距離選通成像原理圖Fig.1 Block diagram of range gating imaging
(1)延遲時間
對于距離選通成像系統,從發出一束脈沖激光到選通門開啟接收目標回波信息的延遲時間是根據目標與成像系統間距離計算得出的[10],因此,需要根據實時測距信息設定選通門開啟時間,在不考慮其他系統延遲情況下,選通門開啟時間可表示為:

式中,t1為延遲時間,L為目標到成像系統間距離,c代表光速。
(2)選通門寬
而選通門寬決定了成像區域的景深,只有在景深范圍內的目標才能夠被清晰成像,測距信息存在一定的精度范圍,為保證能夠在應用測距信息情況下對目標成像,需滿足以下條件:

式中,2ΔR代表測距精度(即 ±ΔR),tpulse代表激光脈沖寬度,tgate代表選通門寬。當tgate>tpulse時,tpulse忽略不計,測距精度只與tgate選通門寬有關。例如,測距精度為±150 m,利用式(2)計算得到tgate+tpulse=2 μs,通常固體激光器脈沖寬度為ns量級,可忽略,則 tpulse≈2 μs。
(3)距離分辨率
距離分辨率是表征距離選通成像系統通過調整延遲時間對目標前后不同距離部分進行成像的能力。

式中,ΔR代表距離分辨率,Rn+1,Rn分別代表兩個不同的成像距離,tclk代表延遲時間步進間隔。例如,選通控制系統步進間隔為2.5 ns,利用式(3)計算得到距離分辨率ΔR=0.375 m。
3 激光距離選通成像作用距離模型
根據激光雷達作用距離方程[11]:

式中:PS為激光器單脈沖能量;Pr為探測器接收能量;ηt為發射系統透過率;ηr為接收系統透過率;R為成像系統到目標的距離;TA為成像系統到目標的大氣透過率;ρ為目標反射率;S為目標截面積;θt為激光發散角;D為接收系統口徑。對于發射系統透過率ηt和接收系統透過率ηr,考慮到光學系統結構不會太復雜,發射系統按0.9計算,接收系統按0.8計算。
取作用距離3.5 km,所經過的大氣路徑為斜程路徑,利用軟件計算,在532 nm處,大氣透過率按 TA=0.6 計算[12]。
通常情況下目標全部位于激光光斑范圍內,故此時的目標面積要用目標上被激光照亮的全部面積來計算,初步擬定為7 m×7 m。
光學系統接收孔徑取D=100 mm,ICCD相機最小可探測能量為1×10-15J[13]。激光發射系統發散角為 5 mrad。由上式可得,為了實現3.5 km有效探測,需采用單脈沖能量10 mJ固體激光器進行照明。
4 構建外場實驗系統
根據以上作用距離模型分析,構建外場實驗系統,實現3.5 km遠距離選通成像探測。整套實驗系統如圖2所示。采用荷蘭Lambert公司的ICCD相機配合長焦鏡頭構建接收成像系統,采用法國Quantel公司的固體脈沖激光器作為照明光源。研制選通控制系統,實現激光器與ICCD相機的高精度同步控制,具體參數如下:
(1)ICCD相機
a)CCD傳感器:pixel數為 1 379 pixel×1 024 pixel,pixel尺寸為 10.3 μm;
b)最大幀頻:25 FPS;
c)像增強器分辨率76 lp/mm。
d)亮度增益:30 000 lm/m2/lx。
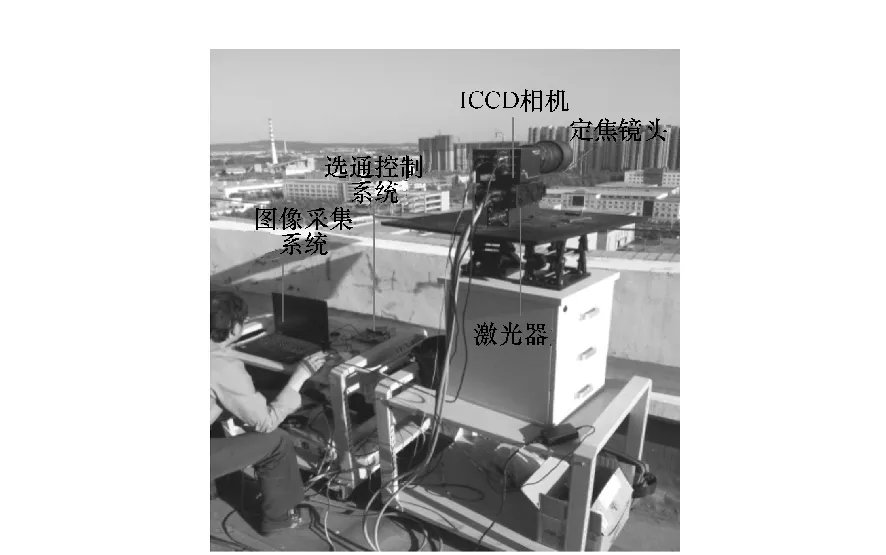
圖2 距離選通成像外場實驗系統Fig.2 Experiment system of range gating imaging
(2)定焦鏡頭
a)F#2.8;
b)焦距300 mm。
(3)激光器
為了與 ICCD工作波段相匹配,需采用532 nm脈沖激光器。需利用信號發生器對激光器進行外觸發控制。所需激光器參數估算如下:
a)輸出波長:532 nm;
b)脈寬:10 ns;
c)重頻:100 Hz;
d)單脈沖能量:>10 mJ。
(4)選通控制系統
a)計時步進:2.5 ns;
b)最小門寬:2.5 ns;
c)距離分辨率:0.375 m;
實驗過程中,采用激光測距機首先獲得測試系統與目標之間的直線距離,換算為同步延時參數輸入選通控制系統,實驗開始后,首先由選通控制系統觸發激光器,發射一束脈沖激光,同時,根據所設定的距離延時參數、激光器觸發延時參數及ICCD相機門控延時參數,在脈沖激光回波到達ICCD像面時觸發像增強器高壓,選通門開啟,接收回波信號成像。
5 實驗結果及數據分析
在3.5 km處對樓體目標進行了不同門寬條件下的距離選通成像,實驗結果如圖3所示。圖像采集過程中保證不同門寬條件下的像增強器增益電壓相同,以此來對比不同門寬條件下的圖像信噪比。

圖3 不同門寬條件下距離選通成像結果Fig.3 Range gating imaging results with different gate width
采用國際通用圖像信噪比計算方法,如式(5)所示。

式中,μ(DN)代表圖像灰度均值,σ(DN)代表灰度值標準偏差[14]。利用該算法對不同門寬條件下所采集圖像進行計算,信噪比計算結果如圖4所示。
由計算結果可以看出,隨著門寬增加,信噪比逐漸降低。圖像當中的樓梯尖頂目標在噪聲較低時,其外部形態清晰可見,隨著門寬增加,尖頂目標周圍出現大量噪聲點,從門寬2 000 ns開始,尖頂附近噪聲逐漸增加,使其外部形態模糊不清。采用相關自動目標識別算法[15]對尖頂目標圖像進行自動識別,識別結果顯示,門寬小于2 000 ns時,識別正確率在85%以上,完全滿足實際工程化應用需求。而而2 000 ns門寬對應的測距精度為±150 m,由此可見,距離選通成像系統對測距系統要求較低。
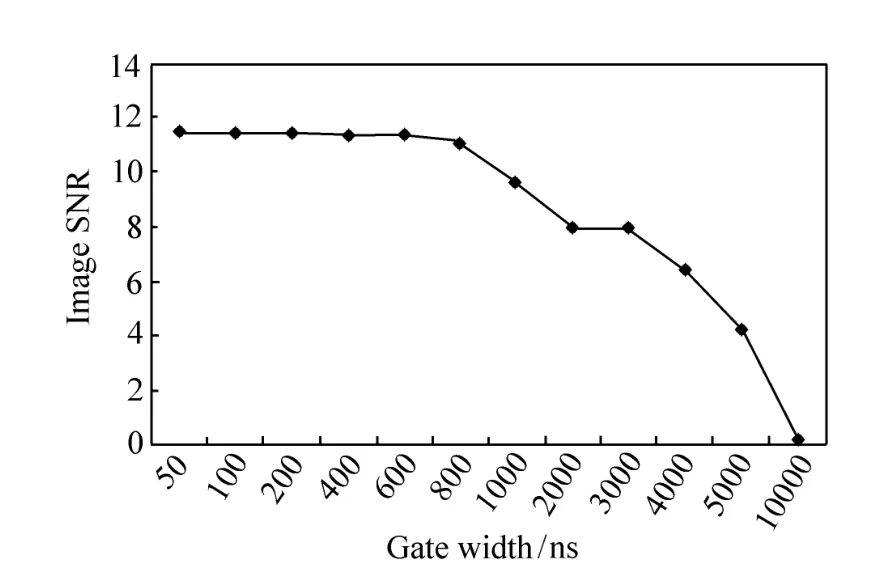
圖4 選通門寬與圖像信噪比關系曲線Fig.4 Curve of relation between gate width and image SNR
5 結論
本文在建立激光距離選通成像作用距離模型的基礎上,構建外場實驗系統。在不同門寬條件下獲得距離選通圖像,并采用國際通用的信噪比計算方法對實驗圖像進行計算。計算結果表明,隨著選通門寬的增加,圖像信噪比逐漸降低,完全符合激光選通成像理論。但研究發現,門寬不大于2 000 ns(對應的測距精度為±150 m)的情況下,圖像信噪比穩定在8以上,圖像質量完全滿足自動目標識別要求,充分證明了距離選通成像技術可擴展性和兼容適應性。本文研究結果對于距離選通成像技術應用推廣有著重要意義。
[1] 張健,張雷,曾飛,等.機載激光3D探測成像系統的發展現狀[J].中國光學,2011,4(3):213-230.ZHANG J,ZHANG L,ZENG F,et al..Development status of airborne 3D imaging lidarsystems[J].Chinese Optics,2011,4(3):213-230.(in Chinese)
[2] PIERRE A.Long-range three-dimensional imaging using range-gated laser radar images[J].Optical Engineering,2006,45(3):034301:1-10.
[3] IAN B,STUART S D,JEREMY W C.A low noise,laser-gated imaging system for long range target identification[J].SPIE,2004,5406:133-144.
[4] VASYL M,GARY K,OVE S.Laser radar:from early history to new trends[J].SPIE,2010,7835:783502-30.
[5] JESSE B,ROBERT B,MARTIN E.High speed short wave infra-red(SWIR)imaging and range gating camera[J].SPIE,2007,6541:654106-12.
[6] DENI B,SYLVIANE L,LOUIS D.On the safe use of long-rangelaser active imager in the near-infrared for homeland security[J].SPIE,2006,6406:1-9.
[7] HLERB G,LUTZMANNP,ANSTETTG.3D imaging with rangegated laser systems using speckle reduction techniques to improve the depth accuracy[J].SPIE,2008,7113:711307-11.
[8] 王銳.多束部分相干光抑制光強閃爍效應的仿真實驗研究[J].發光學報,2014,35(7):835-839.WANG R.Simulation experiment of using multiple partially coherent beams to limit laser intensity scintillation effect[J].Chinese J.Luminescence,2014,35(7):835-839.(in Chinese)
[9] 胡進忠,余曉芬,劉媛媛.基于激光多邊法的坐標測量系統自標定研究[J].電子測量與儀器學報,2014,28(2):130-136.HU J ZH,YU X F,LIU Y Y.Research of self-calibration of 3D coordinate measurement[J].J.Electronic Measurement and Instrumentation,2014,28(2):130-136.
[10] 施智勇,潘曉聲,張謙.利用延時法進行高精度脈沖激光測距[J].光學 精密工程,2014,22(2):252-258.SHI ZH Y,PAN X SH,ZHANG Q.High-precision pulsed laser measuring distance by time delay method[J].Opt.Preci-sion Eng.,2014,22(2):252-258.(in Chinese)
[11] 王銳.激光紅外主被動復合導引系統[J].中國光學,2013,6(4):536-543.WANG R.Compound guided system with active laserimaging and passive infrared imaging[J].Chinese Optics,2013,6(4):536-543.(in Chinese)
[12] KLASéNL,STEINVALLO,BOLANDERG,et al.Gated viewing in the atmosphere-a studyof performance limits[J].SPIE,2002,4723:57-68.
[13] FU B,YANG K CH.Analysis of MCP gain selection for underwater range gated imaging applications based on ICCD[J].J.Modern Optics,2010,57(5):408-417.
[14] 龐春潁,張濤.激光主動成像系統信噪比模型的研究[J].光學 精密工程,2008,16(2):319-324.PANG CH Y,ZHANG T.Signal-to-noise ratio model of laser active imaging system[J].Opt.Precision Eng.,2008,16(2):319-324.(in Chinese)
[15] 王燦進,孫濤,石寧寧,等.基于雙隱含層BP算法的激光主動成像識別系統[J].光學 精密工程,2014,22(6):1639-1647.WANG C J,SUN T,SHI N N,et al..Laser active imaging and recognition system based on double hidden layer BP algorithm[J].Opt.Precision Eng.,2014,22(6):1639-1647.(in Chinese)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32