輸入受限時電機伺服系統漸近跟蹤控制
2015-11-18 06:09:24董振樂姚建勇馬大為
兵工學報 2015年8期
董振樂,姚建勇,馬大為
(南京理工大學機械工程學院,江蘇南京210094)
輸入受限時電機伺服系統漸近跟蹤控制
董振樂,姚建勇,馬大為
(南京理工大學機械工程學院,江蘇南京210094)
參數不確定性、不確定非線性(特別是非線性摩擦)以及輸入受限等非線性問題在電機伺服系統中廣泛存在,針對以上諸多問題,建立了包含連續可微摩擦模型的系統數學模型,提出了一種基于誤差符號積分魯棒控制器的新型控制方法。該方法能實現在輸入受限時和外干擾作用下的漸近跟蹤。采用Lyapunov函數從理論上證明控制器的漸近穩定性。仿真對比結果表明,該控制方法在輸入受限時展現了優良的跟蹤精度和響應速度,且具有較強的魯棒性。
控制科學與技術;電機伺服系統;誤差符號積分魯棒;輸入受限;漸近跟蹤;建模不確定性;連續摩擦補償
0 引言
電機伺服系統具有響應速度快、維護方便、傳動效率高及能源獲取方便等突出優點,在工業和國防領域得到了廣泛的應用[1-3]。近年來這些領域的蓬勃發展,使得對新型電機伺服系統控制器的需求變得迫切,以滿足越來越苛刻的性能指標。
電機伺服系統存在諸多的模型不確定性,包括參數不確定性(如電氣增益、隨溫度及磨損變化的摩擦特性參數等)和不確定非線性(如未建模外干擾、非線性摩擦[4]、輸入受限等),這些不確定性的存在,給控制器的設計帶來很大難度。
針對以上諸多復雜問題,先進控制策略的研究工作已大量開展,目前常用的控制方法有自適應[3]、滑模[5]、自適應魯棒[6-7]、誤差符號積分[8-9]等。自適應控制對參數不確定性和不確定非線性中的可參數化部分,可以有效地估計并實現一定的模型補償[2],然而對于不可參數化的不確定非線性項,自適應控制無能為力,這一定程度上限制了其在高精度跟蹤控制場合的適用性;滑模控制方法簡單,且對于存在有界干擾的系統可以實現漸近的跟蹤控制,然而滑模控制器中不連續符號函數所帶來的顫振現象,易導致系統控制性能的衰減,甚至容易激發系統的高頻未建模動態[5],造成系統失穩,現有的改善滑模抖動措施的控制方法較少且復雜;自適應魯棒控制兼顧了系統的參數不確定性和不確定非線性,在工業領域得到了較好的嘗試[6-7],然而自適應魯棒控制中的魯棒項,其設計依賴于所有不確定項的最大上界,這必然帶來高增益反饋的保守性,當外干擾逐漸增大時,這種保守型將愈發明顯,此外在干擾存在的情況下,自適應魯棒控制器只可實現有界穩定;誤差符號積分魯棒控制可以實現存在不確定非線性的情況下的漸近跟蹤控制[8],在機械手[9]、電液伺服系統[10]上得到了很好的應用。然而,以上各控制方法在應用時對于系統輸入受限并未考慮。
輸入受限是指由于實際系統限制(如伺服驅動器的輸入電壓幅值限制、特殊工作場合的需求等),系統的輸入電壓需要滿足一定的范圍。然而在實際系統中,倘若出現諸如初始位置不匹配、突然過載等惡劣工況,常常會導致輸入電壓在某一段時間突然增大,超出所限制的范圍,一旦發生類似情況,必然導致基于正常工況設計的控制器的控制性能受損,最終影響系統的跟蹤性能。因此在控制器設計時有必要考慮輸入受限問題。針對系統輸入受限問題,目前主要的解決方法有抗飽和設計[11]和模型預測控制[12]等。抗飽和設計常常需要對系統信號施加特定約束,由此必然帶來控制器設計的保守性;而模型預測控制器往往難以兼顧系統參數不確定性和不確定非線性,這限制了其對于一般電機伺服系統的適用性。文獻[13]針對直線電機伺服系統,同時考慮了系統參數不確定性和不確定非線性,設計了輸入受限控制器,然而其在理論上只能保證有界穩定。文獻[14]在誤差符號積分魯棒控制器的基礎上,采用雙曲正切函數,實現了輸入受限時系統的漸近穩定控制,然而文獻[14]中對于系統參數不確定性并未考慮。
本文針對電機伺服系統,首先建立包含連續可微摩擦模型[15]的系統數學模型,同時考慮系統參數不確定性和不確定非線性,然后在誤差符號積分魯棒控制器的基礎上,采用雙曲正切函數[14],對系統控制量幅值進行了合理規劃,不僅實現了在系統參數不確定性和不確定非線性存在下的漸近跟蹤性能,同時避免了因輸入受限導致的控制器失效,最后仿真對比結果驗證了控制器的有效性。
1 問題描述及數學模型
本文所考慮電機伺服系統原理圖如圖1所示,由伺服驅動器驅動伺服電機直接帶動慣性負載做旋轉運動。由于系統電氣部分響應速度遠遠高于機械部分,故本文建模時將忽略電流環動態[3],根據牛頓第二定律,系統動力學方程為

式中:m為慣性負載,ki為電壓力矩增益;Δ為未建模干擾項;為非線性摩擦項,其具體形式為

式中:r1、r2、r3為表征摩擦特性的權重因子;s1、s2、s3為表征不同摩擦部分的形狀因子。該連續摩擦模型可以較好地逼近系統低速運動時的Stribeck效應[4]。
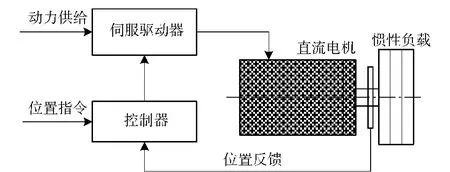
圖1 電機伺服系統原理示意圖Fig.1 Schematic diagram of motor servo system

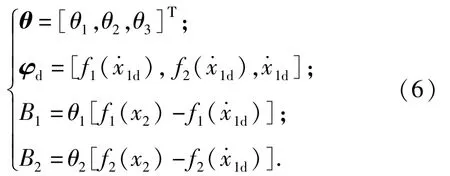
式中:θ1=r1/ki;θ2=r2/ki;θ3=r3/ki;f1(x2)= tanh(s1x2)-tanh(s2x2);f2(x2)=tanh(s3x2);為已知等效慣性負載。
在控制器設計之前,先作以下假設[8]:時變非線性項d(t)存在2階導數,且1階、2階導數均有界,即滿足,,σ1和σ2為已知常數。
2 控制器設計
定義如下系列誤差量:
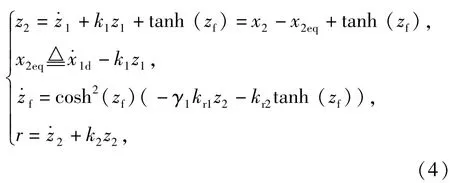
式中:x1d為位置跟蹤指令;z1=x1-x1d為系統跟蹤誤差;r和zf為輔助誤差量,用于隨后的控制器設計,其中r不出現在最終控制律中;k1、k2、kr1、kr2均為正的反饋增益。
結合(3)式和(4)式可得
式中:
設計系統控制輸入為
式中:ua表示模型補償控制器;us表示魯棒控制器;ν表示虛擬輔助控制量;β表示正的可調參數;γ1表示一個正實數用于調節魯棒控制器;表示系統各未知參數估計值;表示參數自適應律;Γ表示自適應回歸參數對角矩陣;,表示基于指令的參數回歸器。
由于信號r中含有較難獲取的加速度信息,所以實際應用時參數估計值的計算方法如(7)式中第6個式子所示。
分析(7)式中系統控制器的構成可知:模型補償控制器ua僅與參數估計和指令及其各階導數有關,必然始終有界;由性質-1≤tanh(ν)≤1可知魯棒控制器us也始終有界,且上界可由參數γ1調節,從而保證了控制輸入始終穩定在已知界內。
將(7)式代入(5)式,可得
定義Lyapunov函數如下:
式中P的選取如(11)式[8]:
結合(4)式和(11)式可知(12)式成立[2,8]:
顯然,若選取β≥(σ1+σ2/k2)/γ1,可保證P始終非負,則Lyapunov函數(9)式成立。進一步對(9)式求導可得

其證明過程如下:
首先,由(4)式可得

根據中值定理可得[2]

將(11)式、(16)式以及(7)式中設計的自適應律代入(13)式,進一步可得
式中:矩陣Λ的定義為
矩陣Λ中各參數定義如下:
通過合理的設計參數k1、k2、kr1、kr2、γ1使矩陣Λ為正定矩陣,可使(20)式成立:

式中:λmin(Λ)表示矩陣Λ的最小特征值。分析(20)式可知V有界,同時W∈L2,進而可知誤差量z1、z2、r、tanh(zf)均有界,結合(3)式、(4)式、(8)式可知,系統中所有信號均有界,從而可知有界,由Barbalat引理可知[3],當t→∞,W→0,也即z1→0,從而實現在輸入受限時的漸近跟蹤控制。
本文設計的控制器的示意圖如圖2所示。
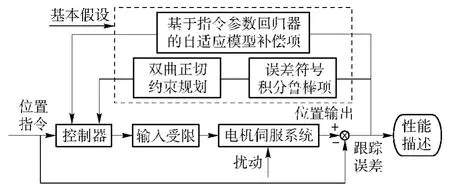
圖2 控制器示意圖Fig.2 Block diagram of the proposed control algorithm
3 仿真結果及分析
電機伺服系統慣性負載:m=0.01 kg·m2;電壓力矩增益:ki=5 N·m/V;摩擦特性的權重因子:r1= 0.1 N·m,r2=0.05 N·m,r3=1.025 N·m;摩擦形狀因子[4]:s1=700 s/rad,s2=15 s/rad,s3=1.5 s/rad.
為了充分驗證本文控制方法對于存在輸入受限的電機伺服系統的有效性,選取工程實際中大量使用的PID控制器作為對比進行仿真驗證,其各參數由Matlab自帶的PID工具箱自整定得到。
系統跟蹤位置指令選取為:x1d= 2[sin(0.5πt)][1-exp(-0.1t2)](如圖3所示);系統外干擾的選取為d=0.5sin(πt).
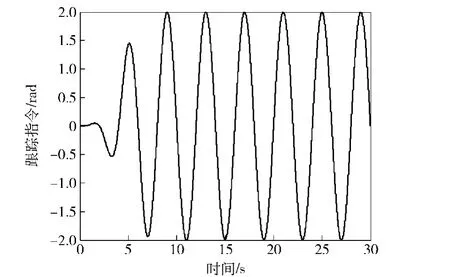
圖3 位置跟蹤指令Fig.3 Position tracking trajectory
本文設計控制器(7)式(記為SARISE)各參數選取為:反饋增益參數:k1=3,k2=700,kr1=1,kr2=1.2;魯棒項調節增益為:γ1=10;自適應回歸參數:Γ1=2×10-4,Γ2=6.5×10-4,Γ3=7.5×10-3;參數β=0.1.
選取系統控制輸入電壓約束值為|u|≤2 V,系統初值位移x1(0)=1 rad.
仿真對比結果如圖4~圖6所示。
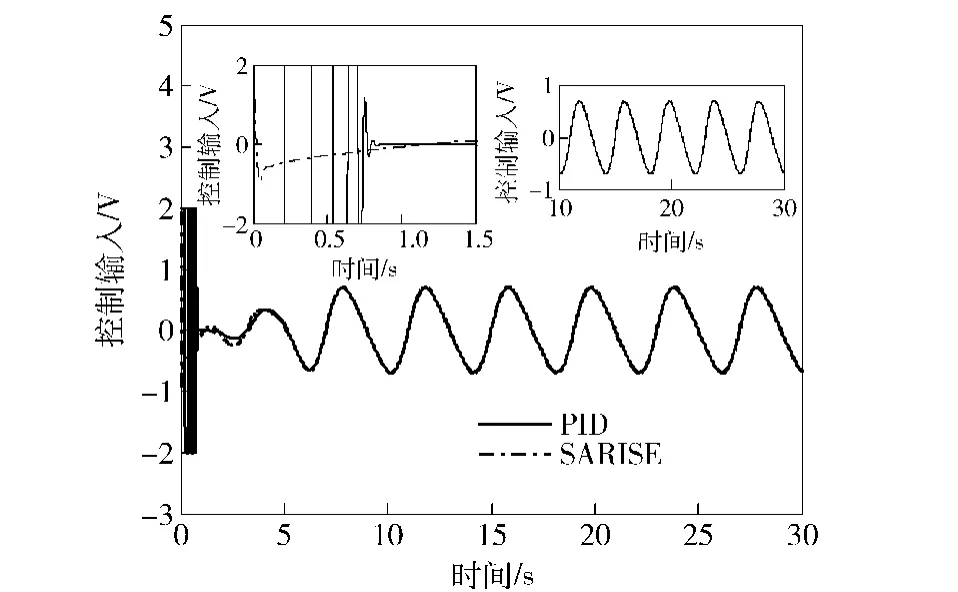
圖4 控制輸入Fig.4 Control input
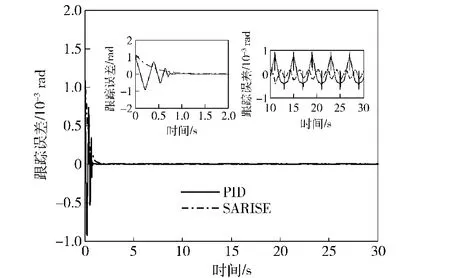
圖5 跟蹤誤差Fig.5 Tracking error
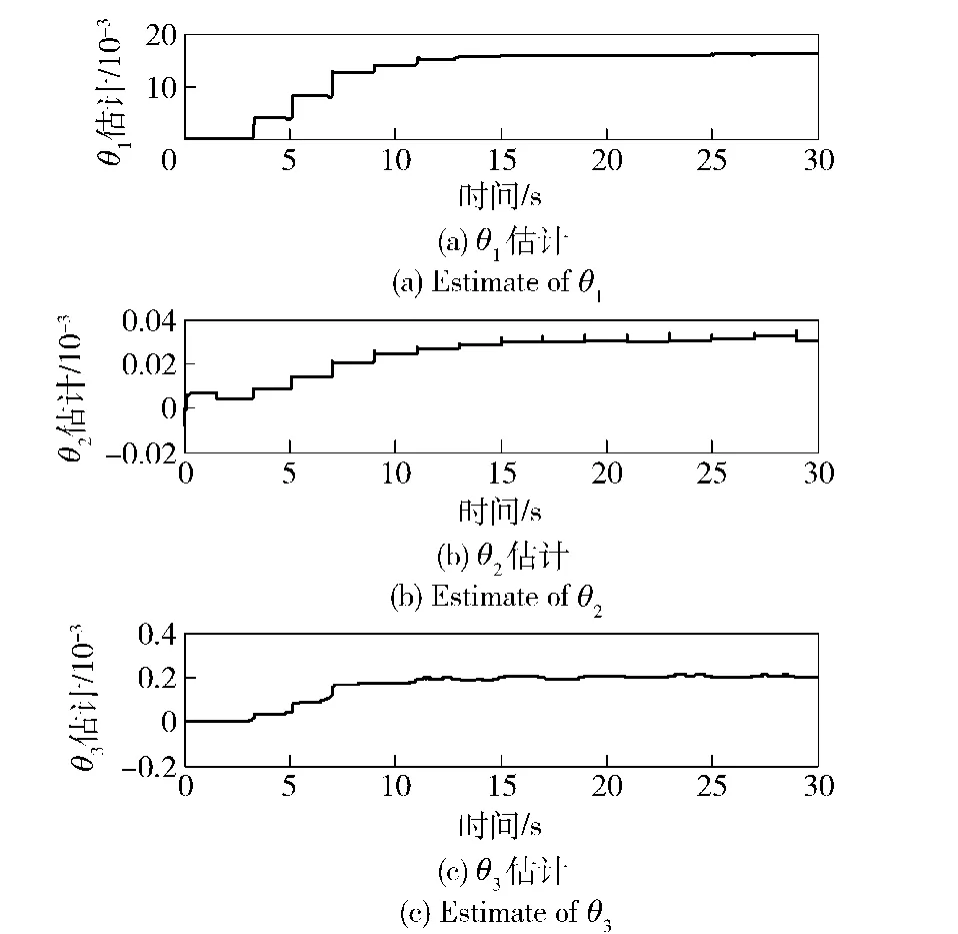
圖6 各參數估計值Fig.6 Estimates of the parameters
圖4代表系統控制輸入對比曲線,從圖4中可以看出:PID控制器在初始段出現了較大的震蕩,這是因為控制輸入電壓約束值的存在,而不匹配的初始狀態使得PID控制器下的控制量在初始段超過了該約束值;本文提出控制方法中雙曲正切函數可實現對控制量較好的規劃作用,從而保證控制輸入在冒犯輸入約束值能及時降幅并穩定在系統允許的約束值之內。穩態段兩控制器無明顯差別。
圖5給出系統跟蹤誤差對比曲線,從中可以看出:由于初始段的輸入震蕩,PID控制器下的跟蹤誤差在初始段出現較大抖動,而本文提出控制方法在初始段較平滑;對比穩態段的跟蹤精度,PID控制器下跟蹤誤差大約為0.001 rad,而SARISE控制器作用下的跟蹤誤差僅為0.000 4 rad,顯然其控制效果明顯優于PID控制器。
圖6給出了系統各參數的估計值,顯然在本文設計自適應律作用下,系統運行一段時間后,各參數實現了很好的收斂并趨于穩定。需要指出的是,對于參數θ2的估計值,雖圖6中并未完全穩定收斂,但整體趨勢已經趨于收斂。參數θ2估計曲線中的毛刺現象,是由于采用了相對較大的自適應增益所致,但這并不影響對參數θ2估計收斂性的判斷。
4 結論
本文提出一種新型電機伺服系統控制策略,同時考慮了非線性摩擦、未建模干擾、輸入受限等諸多不確定非線性。首先建立了包含連續可微摩擦模型的電機伺服系統數學模型,同時考慮系統參數不確定性和不確定非線性;然后針對未建模干擾和輸入受限問題,在誤差符號積分魯棒控制器的基礎上,采用雙曲正切函數對控制量進行了合理約束,不僅實現了在參數不確定性和不確定非線性存在下的漸近跟蹤性能,同時避免了因輸入受限導致的控制器失效;最后通過與傳統PID控制器的仿真對比,較好地驗證了控制器的有效性。本文結論對電機伺服系統的新型控制策略的探索具有一定參考價值。
(
)
[1]陳福紅,馬大為,楊必武,等.火箭炮交流伺服系統全局滑模控制[J].兵工學報,2012,33(6):641-646. CHEN Fu-hong,MA Da-wei,YANG Bi-wu,et al.Global sliding mode control for rocket launcher AC serovo system[J].Acta Armamentarii,2012,33(6):641-646.(in Chinese)
[2]Yao J Y,Jiao Z X,Ma D W.RISE-based precision motion control of DC motors with continuous friction compensation[J].IEEE Transactions on Industrial Electronics,2014,61(12):7067-7075.
[3]Xu L,Yao B.Adaptive robust precision motion control of linear motors with negligible electrical dynamics:theory and experiments[J].IEEE/ASME Transactions on Mechatronics,2001,6(4):444-452.
[4]Yao J Y,Yang G C,Jiao Z X,et al.Adaptive robust motion control of direct-drive dc motors with continuous friction compensation[J].Abstract and Applied Analysis,2013(S):837548.
[5]Yang J,Su J Y,Li S H,et al.High-order mismatched disturbance compensation for motion control systems via a continuous dynamic sliding-mode approach[J].IEEE Transactions on Industrial Electronics,2014,10(1):604-614.
[6]Lu L,Yao B,Wang Q F,et al.Adaptive robust control of linear motors with dynamic friction compensation using modified LuGre model[J].Automatica,2009,45(12):2890-2896.
[7]Yao J Y,Jiao Z X,Ma D W.Adaptive robust control of DC motors with extended state observer[J].IEEE Transactions on Industrial Electronics,2014,61(7):3630-3637.
[8]Xian B,Damson D M,De Queiroz M S,et al.A continuous asymptotic tracking control strategy for uncertain nonlinear systems[J].IEEE Transactions on Automatic Control,2004,49(7):1206-1211.
[9]Patre P M,MacKunis W,Makkar C,et al.Asymptotic tracking control for systems with structured and unstructured uncertainties[J].IEEE Transactions on Control Systems Technology,2008,16(2):373-379.
[10]Yao J Y,Jiao Z X,Ma D W,et al.High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties[J]. IEEE/ASME Transactions on Mechatronics,2014,19(2):633-641.
[11]Dai D,Hu T,Teel A R,et al.Output feedback design for saturated linear plants using deadzone loops[J].Automatica,2009,45(12):2917-2924.
[12]Cuzzola F A,Geromel J C,Morari M.An improved approach for constrained robust model predictive control[J].Automatica,2002,38(7):1183-1189.
[13]Gayaka S,Lu L,Yao B.Global stabilization of a chain of integrators with input saturation and disturbances:a new approach[J].Automatica,2012,48(7):1389-1396.
[14]Fischer N,Kan Z,Dixon W E.Saturated RISE feedback control for Euler-Lagrange systems[C]∥American Control Conference. Montréal,Canada:The American Automatic Control Council,2012:244-249.
[15]Makkar C,Dixon W E,Sawyer W G,et al.A new continuously differentiable friction model for control systems design[C]∥Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Monterey,California,US:IEEE/ASME,2005:600-605.
Asymptotic Tracking Control of Motor Servo System with Input Constraint
DONG Zhen-le,YAO Jian-yong,MA Da-wei
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China)
Parameter uncertainties,uncertain nonlinearities(especially the nonlinear frictions)and input constraint are the common problems existing in motor servo systems.For the above problems,a new method,based on the robust integral of the sign of error(RISE)design,is proposed to achieve the asymptotic tracking performance in the presence of parameter uncertainties,uncertain nonlinearities and input constraint.The stability of asymptotic tracking is proved via the Lyapunov analysis.Simulation results illustrate that the proposed approach can be used to achieve the excellent response speed and tracking performance under input constraint,and has a strong robustness.
control science and technology;motor servo system;robust integral of the sign of error;input constraint;asymptotic tracking;modeling uncertainty;continuous friction compensation
TJ393
A
1000-1093(2015)08-1405-06
10.3969/j.issn.1000-1093.2015.08.005
2014-10-11
國家自然科學基金項目(51305203);江蘇省自然科學基金項目(BK20141402);江蘇省普通高校研究生科研創新計劃項目(KYLX_0397)
董振樂(1988—),男,博士研究生。E-mail:dong_zhenle@163.com;馬大為(1953—),男,教授,博士生導師。E-mail:ma-dawei@mail.njust.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17