基于樣條插值的仿壁虎機器人足端脫附軌跡規劃
2015-11-17 16:25:59孫功勛俞志偉沈丹妮吳加明汪中原戴振東
現代電子技術 2015年16期
孫功勛+俞志偉+沈丹妮+吳加明+汪中原+戴振東
摘 要: 針對仿壁虎機器人足端粘附脫附運動,提出了Spline三次樣條插值與Matlab/Simulink 半實物仿真相結合的足端軌跡生成及優化的方法。合理選取關鍵節點,利用三次樣條插值,可快速得到所需復雜的光滑軌跡曲線。設計了測試平臺并進行半實物仿真,通過分析數據采集卡采集的脫附力的變化趨勢,并合理調整三次樣條插值數據節點,優化脫附軌跡及其法向力與切向力,使仿壁虎機器人單足脫附過程切向力和法向力保持在較小范圍。驗證了該方法在單腿運動軌跡生成中的有效性和可行性,為四足步態生成與爬壁實驗奠定基礎。
關鍵詞: 仿壁虎機器人; 足端軌跡規劃; 樣條插值; SimMechanics仿真
中圖分類號: TN409?34 文獻標識碼: A 文章編號: 1004?373X(2015)16?0009?04
Conglutination and desorption trajectory planning method for gecko?inspired robot foot?end based on spline interpolation
SUN Gongxun1,2, YU Zhiwei1, SHEN Danni1, WU Jiaming3, WANG Zhongyuan1, DAI Zhendong1
(1. Institute of Bio?inspired Structure and Surface Engineering, NUAA, Nanjing 210016, China;
2. College of Automation Engineering, NUAA, Nanjing 210016, China; 3. Huawei Software Technologies Co., Ltd, Nanjing 210012, China)
Abstract: To plan conglutination and desorption trajectory of gecko?inspired robot, a method to generate and optimize the foot?end trajectory combining cubic spline interpolation with Matlab/Simulink semi?physical simulation is proposed. With proper selection of key node and cubic spline interpolation, the needed complex and smooth trajectory curve can be obtained. A testing platform was designed to carry out the semi?physical simulation. With the analysis on the change trend of the desorption force collected by data acquisition card and reasonable adjustment of cubic spline interpolation data nodes, the desorption trajectory, normal and tangential forces were optimized, which made the normal and tangential forces in the single?foot desorption process of the gecko?inspired robot to be kept in small range. Experimental result shows the reliability and efficiency of this method in the single?leg moving trajectory generation. The optimized trajectory can be applied in the gait planning and wall?climbing of gecko?inspired robot in the future.
Keywords: gecko?inspired robot; foot?end trajectory planning; spline interpolation; SimMechanics simulation
壁虎具有出色的粘附脫附控制能力,它可在墻壁和天花板等各種表面自由攀爬[1],類壁虎機器人在核工業、反恐偵查、航天等領域有很好的應用前景[2]。應用干粘附材料的仿壁虎機器人爬壁時依賴于腿的運動行為,需要一定的預壓力使足端干粘附材料與粘附表面達到足夠大的接觸面積,獲得較大的粘附力,而剝落時要盡量減小脫附力[3],因此合理的足端粘附脫附軌跡是仿壁虎機器人進行順利爬壁的重要因素。
針對干粘附材料的粘附性能測試系統大多是二維測試裝置,并且體積較大,性價比較低。此外,現有測試設備沒將干粘附材料的粘附性能和仿壁虎機器人的足端粘/脫附軌跡相結合。研究干粘附材料的粘附性能,從而找到應用在機器人足端的粘/脫附軌跡,使仿壁虎機器人擁有較大的粘附力和較小的脫附力,對未來應用于機器人爬壁具有重要理論指導意義和使用價值。
機器人的末端軌跡規劃中,足端位姿可用一系列節點表示[4],將機器人的軌跡視為由機器人笛卡爾空間中一系列的關鍵節點構成[5],可以通過笛卡爾空間所規劃的軌跡的運動學逆解得到對應的關節空間角度[6]。笛卡爾空間的軌跡規劃相對于關節空間,規劃的路徑準確,足端的運動軌跡更加直觀[7]。但在笛卡爾空間仿壁虎機器人的足端軌跡復雜,不易寫出對應的復雜時間和空間函數,而常見形狀如直線、拋物線、圓弧等不能滿足較理性粘/脫附的要求。文獻[8]中,采用相同半徑不同圓心的圓弧方程組設計了5種不同脫附軌跡進行脫附,對仿壁虎腳趾的最大脫附力特性進行了測試。該方法生成的圓弧軌跡固定,需要尋找確切的方程來表達,且對運動過程中脫附力特性不理想的軌跡段進行調整優化的靈活性較差。本文提出由Matlab/Simulink搭建含Switch開關模塊的單腿軌跡生成與仿真模型,采用Spline樣條插值方法將關鍵節點兩兩之間通過三次多項式曲線進行連接,并進行軌跡優化,從而得到所需機器人運動的粘附/脫附軌跡。endprint
1 測試平臺
仿壁虎機器人的足端粘附脫附軌跡測試平臺如圖1所示,機械裝置包括力測量和三維運動裝置。力測量裝置由一個二維力傳感器和信號處理設備構成,二維毫牛級H型力傳感器與傳感器墊片形成懸臂梁結構,通過粘貼有應變片的懸臂梁的形變測量法向力(z方向)和切向力(y方向)。傳感器電信號經IBSS數據采集卡采集、放大,最終由YMC9800軟件分析、顯示、存儲,采樣頻率設置為100 Hz。在傳感器頂部安裝有機玻璃承重臺,運動控制系統中仿壁虎機器人單腿作為運動部件。三個舵機執行三維方向規定軌跡的運動。腳掌由帶一定弧度的彈性聚氯乙烯(PVC)材料做基底,干粘附聚氨酯(PU)材料(23 mm×38 mm×2 mm)固定在基底上。
圖1 仿壁虎機器人足端粘附脫附軌跡測試平臺
由Matlab/Simulink建立步態規劃與仿真模型后,通過Quanser進行半實物實時仿真,對力測量與采集裝置獲得的單腿粘附脫附過程的力數據進行處理與分析。
2 軌跡提取方法
仿壁虎機器人笛卡爾空間的粘附脫附軌跡復雜,常見的直線、拋物線、圓弧等軌跡不能滿足有效粘/脫附的要求,因此需要找一種快速可靠的粘附脫附過程數據點生成的方法并對生成的軌跡進行評估、優化。
插值方法中,本文選擇具有良好數學特征、易得到平滑曲線的三次樣條插值法;插值的實現上;選取了計算功能強的Matlab,能夠通過較少的代碼實現這一復雜的插值計算。
仿壁虎機器人足端軌跡生成及其優化的過程如圖2所示。仿壁虎機器人的足端軌跡由粘附和脫附2個過程組成,粘附過程需要腳掌保證足夠的接觸面積,用直線段就可實現,由Matlab Function模塊生成;脫附軌跡由三次樣條插值生成,粘附與脫附過程通過Switch開關進行切換。粘附脫附軌跡生成子模塊如圖3所示。
圖2 仿壁虎機器人足端軌跡生成及優化流程圖
圖3 仿壁虎機器人的足端粘附脫附
笛卡爾空間軌跡生成子模塊
2.1 Matlab的Spline樣條插值軌跡生成及優化的步驟
(1) 確定足端粘附脫附運動空間起點和終點坐標。在前期脫附過程采用分段拋物線的實驗基礎上,對實驗的脫附軌跡及力趨勢進行分析后,設定起止點為(0,0),(20,74),單位為mm,并設置期望經過的中間路徑點;
(2) 將各笛卡爾空間坐標值作為三次樣條插值軌跡規劃算法的輸入;
(3) 運用Matlab Spline三次樣條插值函數[9?10]編程生成軌跡點,經搭建的Simulink機器人單腿仿真模型,得到各關節在所有路徑點上的關節角度值;
(4) 通過半實物仿真測試粘附脫附過程最大法向力和切向力,合理調整路徑點至法向力、切向力都保持在較合理范圍內。
2.2 Spline三次樣條插值程序
應用Spline三次樣條插值函數[11]編寫的 Matlab源程序如下:
y=[0;2;3;5;7;8;9;11;13;14;16;18;20];
z=[0;6;8;11;18;22;28;41;56;63;69;72;74];
yp=0:(20/80):20;
pp=spline(y,z);
s=pp.coefs
zp=spline(y,z,yp);
plot(y,z,′*′,yp,zp,′?′)
title(′足端脫附軌跡′);
xlabel(′y/mm′);
ylabel(′z/mm′);
t=[1:0.01:9];
yp=[t yp];
zp=[t zp];
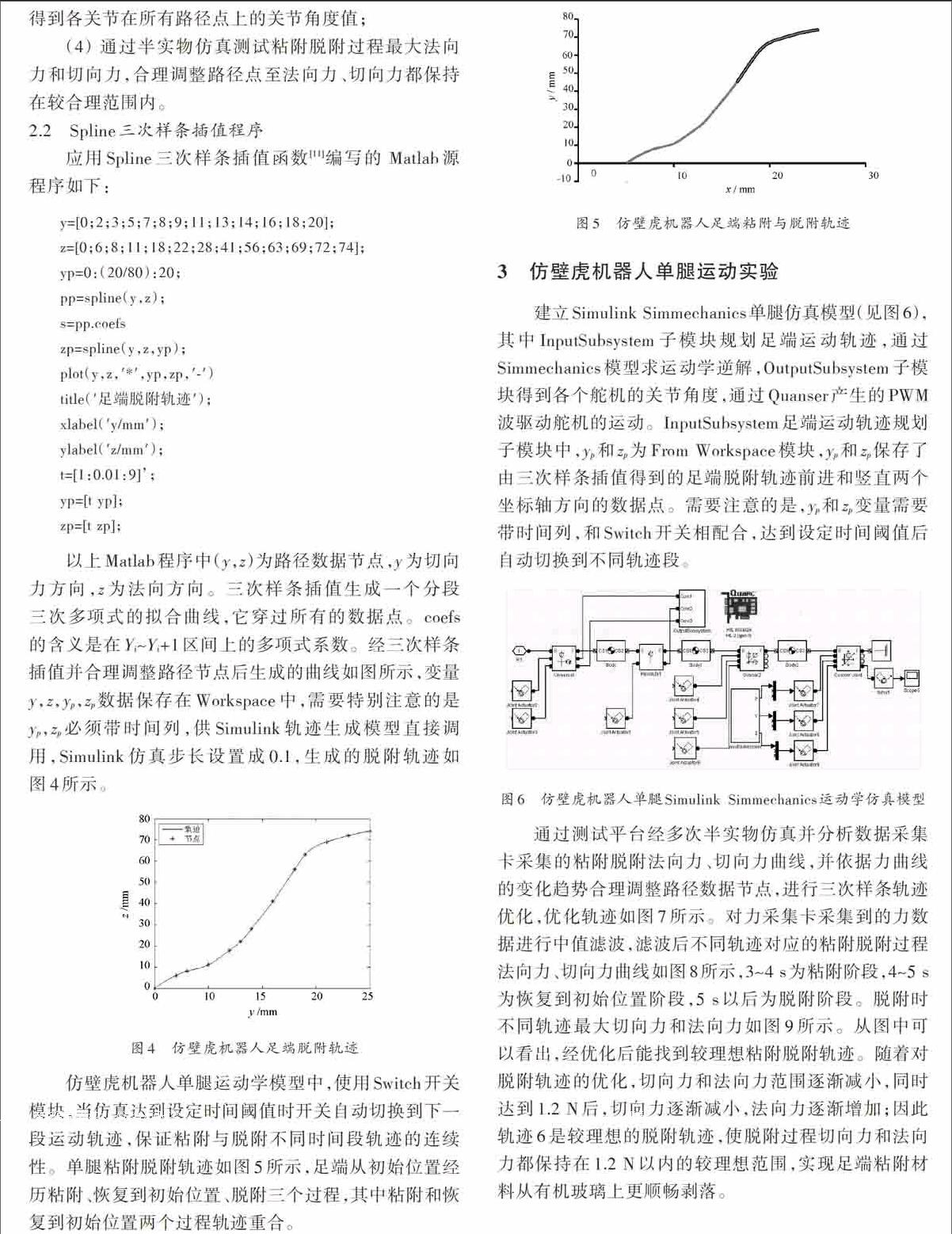
以上Matlab程序中(y,z)為路徑數據節點,y為切向力方向,z為法向方向。三次樣條插值生成一個分段三次多項式的擬合曲線,它穿過所有的數據點。coefs的含義是在Yi~Yi+1區間上的多項式系數。經三次樣條插值并合理調整路徑節點后生成的曲線如圖所示,變量y,z,yp,zp數據保存在Workspace中,需要特別注意的是yp,zp必須帶時間列,供Simulink軌跡生成模型直接調用,Simulink仿真步長設置成0.1,生成的脫附軌跡如圖4所示。
圖4 仿壁虎機器人足端脫附軌跡
仿壁虎機器人單腿運動學模型中,使用Switch開關模塊,當仿真達到設定時間閾值時開關自動切換到下一段運動軌跡,保證粘附與脫附不同時間段軌跡的連續性。單腿粘附脫附軌跡如圖5所示,足端從初始位置經歷粘附、恢復到初始位置、脫附三個過程,其中粘附和恢復到初始位置兩個過程軌跡重合。
圖5 仿壁虎機器人足端粘附與脫附軌跡
3 仿壁虎機器人單腿運動實驗
建立Simulink Simmechanics單腿仿真模型(見圖6),其中InputSubsystem子模塊規劃足端運動軌跡,通過Simmechanics模型求運動學逆解,OutputSubsystem子模塊得到各個舵機的關節角度,通過Quanser產生的PWM波驅動舵機的運動。InputSubsystem足端運動軌跡規劃子模塊中,yp和zp為From Workspace模塊,yp和zp保存了由三次樣條插值得到的足端脫附軌跡前進和豎直兩個坐標軸方向的數據點。需要注意的是,yp和zp變量需要帶時間列,和Switch開關相配合,達到設定時間閾值后自動切換到不同軌跡段。
圖6 仿壁虎機器人單腿Simulink Simmechanics運動學仿真模型
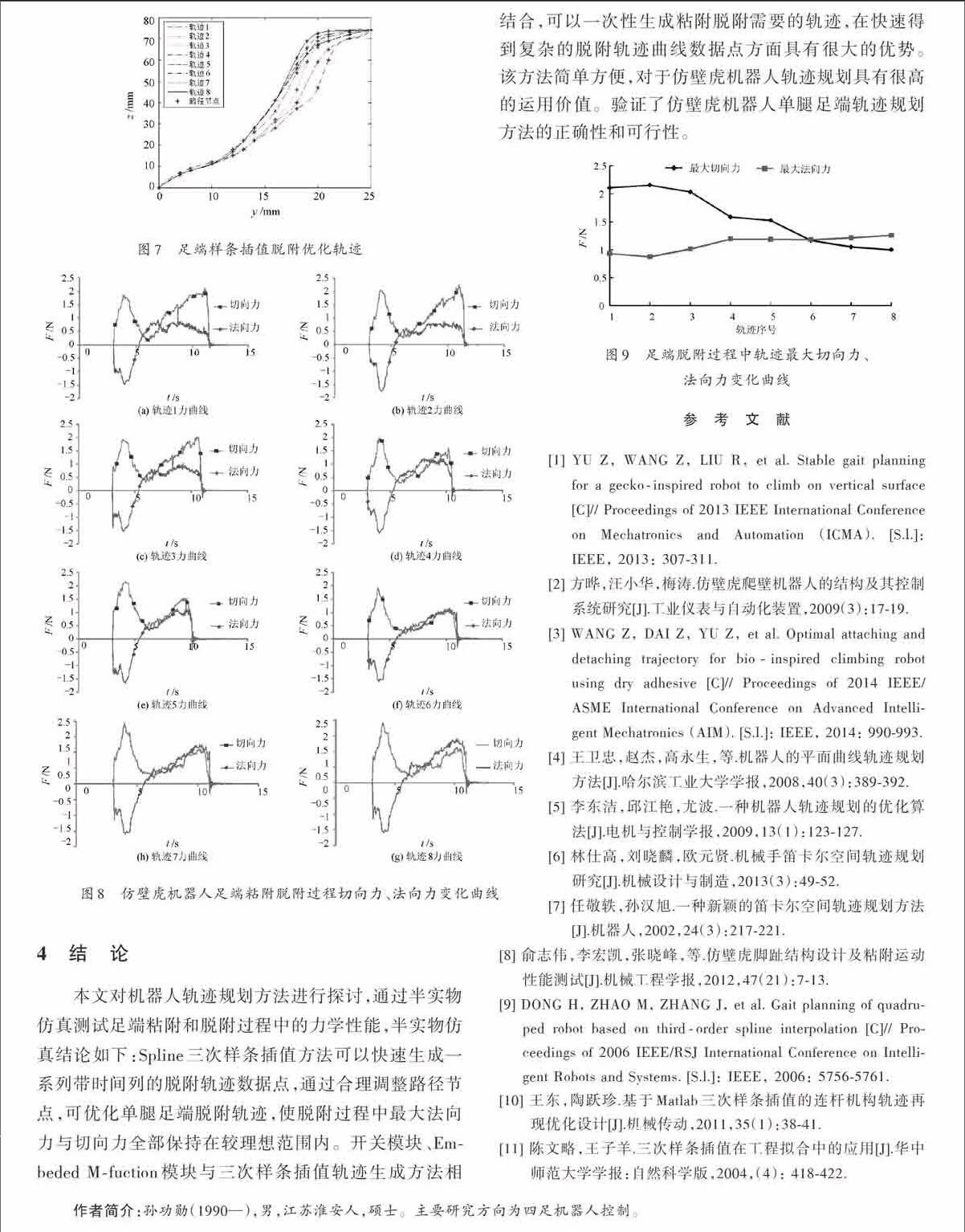
通過測試平臺經多次半實物仿真并分析數據采集卡采集的粘附脫附法向力、切向力曲線,并依據力曲線的變化趨勢合理調整路徑數據節點,進行三次樣條軌跡優化,優化軌跡如圖7所示。對力采集卡采集到的力數據進行中值濾波,濾波后不同軌跡對應的粘附脫附過程法向力、切向力曲線如圖8所示,3~4 s為粘附階段,4~5 s為恢復到初始位置階段,5 s以后為脫附階段。脫附時不同軌跡最大切向力和法向力如圖9所示。從圖中可以看出,經優化后能找到較理想粘附脫附軌跡。隨著對脫附軌跡的優化,切向力和法向力范圍逐漸減小,同時達到1.2 N后,切向力逐漸減小,法向力逐漸增加;因此軌跡6是較理想的脫附軌跡,使脫附過程切向力和法向力都保持在1.2 N以內的較理想范圍,實現足端粘附材料從有機玻璃上更順暢剝落。
圖7 足端樣條插值脫附優化軌跡
4 結 論
本文對機器人軌跡規劃方法進行探討,通過半實物仿真測試足端粘附和脫附過程中的力學性能,半實物仿真結論如下:Spline三次樣條插值方法可以快速生成一系列帶時間列的脫附軌跡數據點,通過合理調整路徑節點,可優化單腿足端脫附軌跡,使脫附過程中最大法向力與切向力全部保持在較理想范圍內。開關模塊、Embeded M?fuction模塊與三次樣條插值軌跡生成方法相結合,可以一次性生成粘附脫附需要的軌跡,在快速得到復雜的脫附軌跡曲線數據點方面具有很大的優勢。該方法簡單方便,對于仿壁虎機器人軌跡規劃具有很高的運用價值。驗證了仿壁虎機器人單腿足端軌跡規劃方法的正確性和可行性。
圖9 足端脫附過程中軌跡最大切向力、
法向力變化曲線
參考文獻
[1] YU Z, WANG Z, LIU R, et al. Stable gait planning for a gecko?inspired robot to climb on vertical surface [C]// Proceedings of 2013 IEEE International Conference on Mechatronics and Automation (ICMA). [S.l.]: IEEE, 2013: 307?311.
[2] 方曄,汪小華,梅濤.仿壁虎爬壁機器人的結構及其控制系統研究[J].工業儀表與自動化裝置,2009(3):17?19.
[3] WANG Z, DAI Z, YU Z, et al. Optimal attaching and detaching trajectory for bio?inspired climbing robot using dry adhesive [C]// Proceedings of 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). [S.l.]: IEEE, 2014: 990?993.
[4] 王衛忠,趙杰,高永生,等.機器人的平面曲線軌跡規劃方法[J].哈爾濱工業大學學報,2008,40(3):389?392.
[5] 李東潔,邱江艷,尤波.一種機器人軌跡規劃的優化算法[J].電機與控制學報,2009,13(1):123?127.
[6] 林仕高,劉曉麟,歐元賢.機械手笛卡爾空間軌跡規劃研究[J].機械設計與制造,2013(3):49?52.
[7] 任敬軼,孫漢旭.一種新穎的笛卡爾空間軌跡規劃方法[J].機器人,2002,24(3):217?221.
[8] 俞志偉,李宏凱,張曉峰,等.仿壁虎腳趾結構設計及粘附運動性能測試[J].機械工程學報,2012,47(21):7?13.
[9] DONG H, ZHAO M, ZHANG J, et al. Gait planning of quadruped robot based on third?order spline interpolation [C]// Proceedings of 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: IEEE, 2006: 5756?5761.
[10] 王東,陶躍珍.基于Matlab三次樣條插值的連桿機構軌跡再現優化設計[J].機械傳動,2011,35(1):38?41.
[11] 陳文略,王子羊.三次樣條插值在工程擬合中的應用[J].華中師范大學學報:自然科學版,2004,(4): 418?422.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
