基于智能視覺相機(jī)的視頻澆注系統(tǒng)
2015-11-16 06:04:12豐裕文盧錫偉
金屬加工(熱加工) 2015年11期
■豐裕文,盧錫偉
現(xiàn)代化的高速造型線的出現(xiàn),無疑加大了鑄造業(yè)澆注的工作強(qiáng)度。由于澆注作業(yè)是重復(fù)性的工作,因此需要一個(gè)能夠代替人的雙眼以長時(shí)間監(jiān)視澆口杯的裝置。視頻澆注是一項(xiàng)能夠持續(xù)監(jiān)控澆口杯,并完成自動澆注的現(xiàn)代化技術(shù)。
1. 視頻澆注系統(tǒng)的應(yīng)用與發(fā)展
在智能視覺相機(jī)出現(xiàn)之前,原有的視頻澆注系統(tǒng)的監(jiān)控裝置是由工業(yè)相機(jī)(C C D或CMOS)、視頻采集卡、PC組成的,工業(yè)相機(jī)只能將光信號轉(zhuǎn)換成模擬電信號,然后由視頻采集卡將這些模擬信號轉(zhuǎn)換成數(shù)字信號(0和1)。
多數(shù)視頻采集卡都具備硬件壓縮的功能,在采集視頻信號時(shí)首先在卡上對視頻信號進(jìn)行壓縮,然后通過PCI接口把壓縮的視頻數(shù)據(jù)傳送到PC,同時(shí)有一個(gè)獨(dú)立的視頻顯示器與視頻卡通過同軸電纜相連,澆注圖像由視頻顯示器顯示。
由于PC采用通用視頻A/D轉(zhuǎn)換器實(shí)現(xiàn)數(shù)據(jù)的采集,數(shù)據(jù)采集占用了CPU的時(shí)間,對處理器的速度要求很高。而且原有的控制系統(tǒng)采用的是PC結(jié)合輸入輸出單元的設(shè)計(jì),所有的計(jì)算工作都是由PC來完成的,這樣就又加重了PC的工作負(fù)荷,引起系統(tǒng)不穩(wěn)定,圖像顯示斷續(xù),容易導(dǎo)致系統(tǒng)死機(jī),故障經(jīng)常發(fā)生。如果在澆注過程中出現(xiàn)這樣的情況,便會使?jié)沧⒐ぷ魍V梗绊懮a(chǎn)。
為了解決上面出現(xiàn)的問題。我們改進(jìn)了視頻澆注系統(tǒng),采用智能視覺相機(jī)來監(jiān)控澆口杯。智能視覺相機(jī)是一個(gè)兼具圖像采集、圖像處理、信息傳遞功能和I/O控制的小型機(jī)器視覺系統(tǒng)(見圖1),是一種嵌入式的機(jī)器視覺系統(tǒng)。它將圖像傳感器、數(shù)字處理器、通信模塊和I/O控制單元集成到一個(gè)單一的相機(jī)內(nèi),使相機(jī)能夠完全替代傳統(tǒng)的基于P C的計(jì)算機(jī)系統(tǒng),獨(dú)立地完成預(yù)先設(shè)定的圖像處理和分析任務(wù)。該相機(jī)采用了一體化的設(shè)計(jì),降低了系統(tǒng)的復(fù)雜度,提高了系統(tǒng)的可靠性。該相機(jī)的最大特點(diǎn)是集成度高,功能模塊化。作為獨(dú)立的智能圖像采集和處理單元,內(nèi)部存儲器可以存儲下載的圖像處理算法。智能視覺相機(jī)還具有抗干擾能力強(qiáng)、開發(fā)效率高、組成簡單、規(guī)格等級化等優(yōu)點(diǎn)。
選擇智能視覺相機(jī)時(shí),考慮到相機(jī)的穩(wěn)定性、尺寸大小、采樣速度等,我們選用了康耐視公司的Ins i ght Mi cr o系列1 4 0 0智能視覺相機(jī)。這款相機(jī)是世界上最小巧、智能、簡易的一體化的視覺系統(tǒng)。而且該款相機(jī)也是這一系列當(dāng)中采樣速度最快的機(jī)型。它的體積只有30mm×30mm×60mm,非常節(jié)約空間。相機(jī)的背面采用的是M1 2以太網(wǎng)接口,也有I/O接口。由于是采用PLC控制相機(jī),所以選用M12接口通信,相機(jī)端用M12接口,另一端采用以太網(wǎng)RJ45接頭,相機(jī)采用了POE供電技術(shù)。原有系統(tǒng)的工業(yè)相機(jī)除了需要同軸電纜來傳輸圖像數(shù)據(jù)之外,還需要AC110V供電。而POE電源技術(shù)只需要一根以太網(wǎng)電纜連接相機(jī),該電纜同時(shí)能夠供電和傳輸數(shù)據(jù)。而且POE電源只會為需要供電的設(shè)備供電,只有連接了需要供電的設(shè)備,以太網(wǎng)才會有電壓存在,因此解決了線路上漏電的風(fēng)險(xiǎn)。
如前所述,原有視頻澆注系統(tǒng)是采用PC的CPU來完成控制的,因此P C不但要對采樣來自澆口杯的數(shù)據(jù)圖像做處理,與視頻采集卡、顯示器配合完成澆注圖像的顯示工作,還要處理系統(tǒng)中模擬量、數(shù)字量的輸入輸出工作,所以負(fù)擔(dān)過重。由于采用了智能視覺相機(jī),該相機(jī)能通過以太網(wǎng)通信,所以我們便采用了PLC觸摸屏結(jié)合PC的設(shè)計(jì)。由PLC來完成系統(tǒng)中模擬量、數(shù)字量的輸入輸出工作。而PC只是用來配合觸摸屏來完成人機(jī)對話及澆口圖像的顯示工作。考慮到該視頻澆注系統(tǒng)需要I/O控制、運(yùn)動控制和網(wǎng)絡(luò)通信要求,選用了AB公司的1768-Compact l og i x系列的PLC,該型PLC是專門針對以上幾點(diǎn)而設(shè)計(jì)的。采用以太網(wǎng)的通信網(wǎng)絡(luò),無論是從系統(tǒng)的復(fù)雜程度還是傳輸數(shù)據(jù)的穩(wěn)定性方面都得到了很大的提高。
改進(jìn)后的視頻澆注系統(tǒng)的結(jié)構(gòu)框圖如圖2所示。
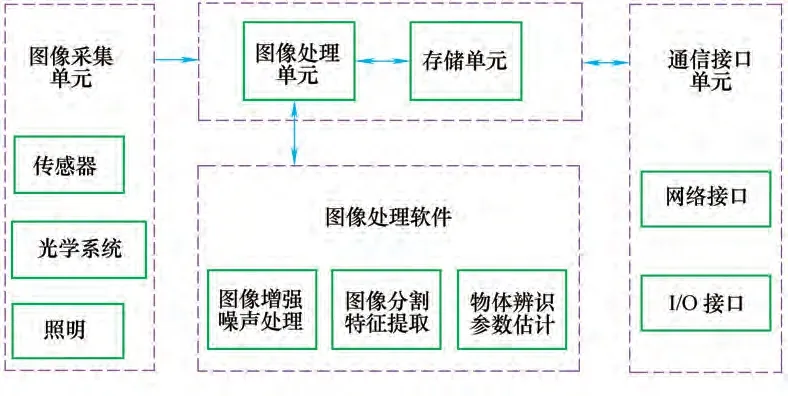
圖1 智能視覺相機(jī)結(jié)構(gòu)
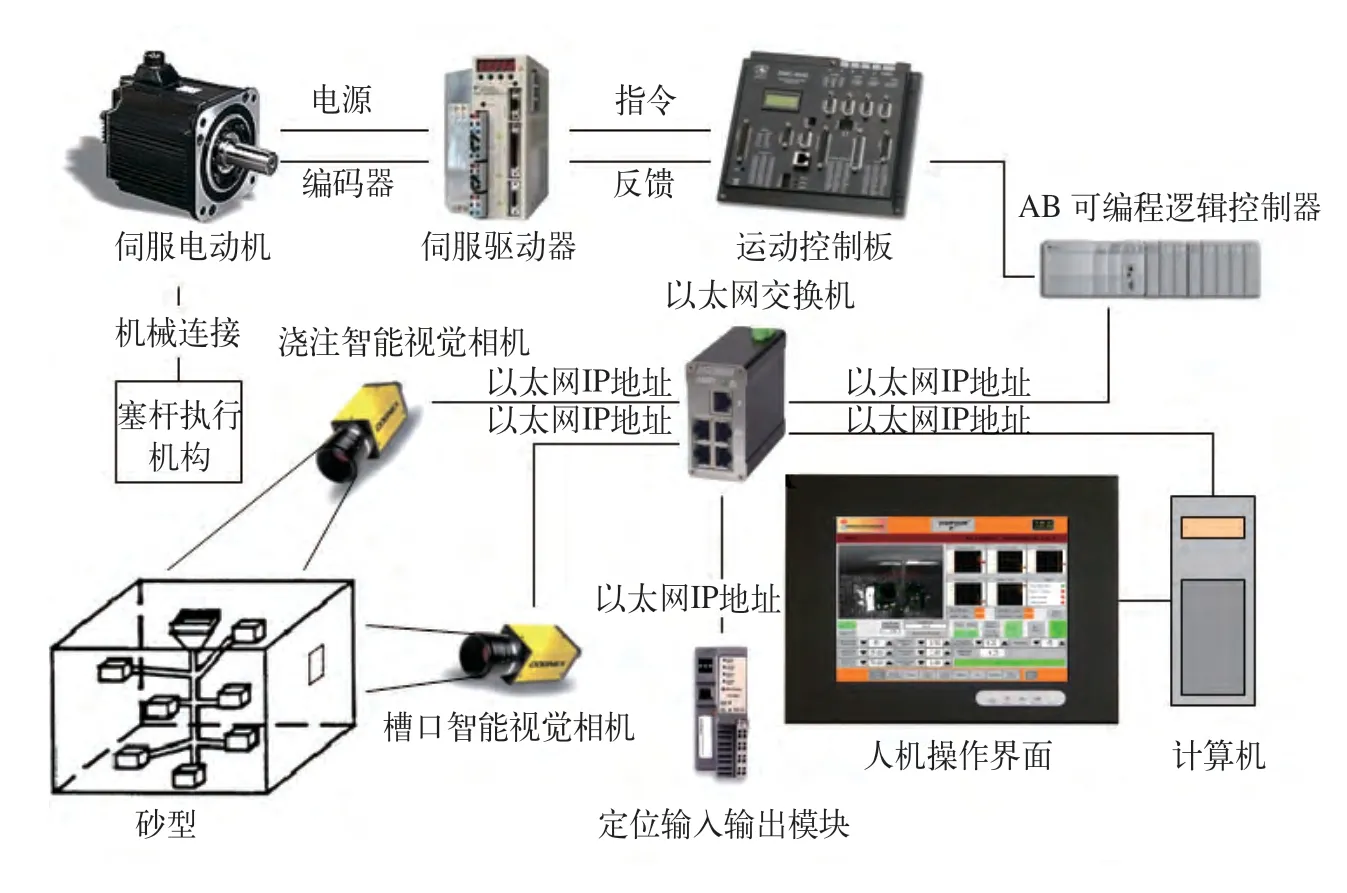
圖2 改進(jìn)后視頻澆注系統(tǒng)結(jié)構(gòu)框圖
從以上框圖可以看出,視頻澆注系統(tǒng)是由智能視覺和運(yùn)動控制執(zhí)行兩部分組成的。視覺部分主要就是智能視覺相機(jī)、觸摸屏、PLC、而運(yùn)動控制部分是由PLC,運(yùn)動控制板、伺服電動機(jī)驅(qū)動器、運(yùn)動執(zhí)行機(jī)構(gòu)(包括伺服、電機(jī))組成(見圖3)。運(yùn)動執(zhí)行機(jī)構(gòu)安裝在澆注機(jī)“Y”軸載車上,靠近澆包,故設(shè)計(jì)的結(jié)構(gòu)能承受澆注包中金屬高溫。其懸臂可轉(zhuǎn)動,方便更換塞桿及取下澆包,也使維修塞桿更容易。塞桿機(jī)構(gòu)的控制臂帶有氣缸,可以通過氣缸讓塞桿機(jī)構(gòu)進(jìn)行旋轉(zhuǎn),塞桿底部便會與澆口杯做碾磨動作,以使塞桿和澆口杯的貼合度達(dá)到最佳,防止鐵液泄漏。該機(jī)構(gòu)是由PLC控制,通過驅(qū)動伺服電動機(jī)來實(shí)現(xiàn)動作的,這樣就能快速響應(yīng)來自PLC給出的澆注信號,并由PLC根據(jù)對塞桿扭矩的跟蹤而自動調(diào)整塞桿位置。伺服電動機(jī)帶動絲桿轉(zhuǎn)動,每轉(zhuǎn)絲桿前進(jìn)3mm,伺服編碼器設(shè)置為8192個(gè)脈沖,運(yùn)動控制精度達(dá)到了0.3μm。
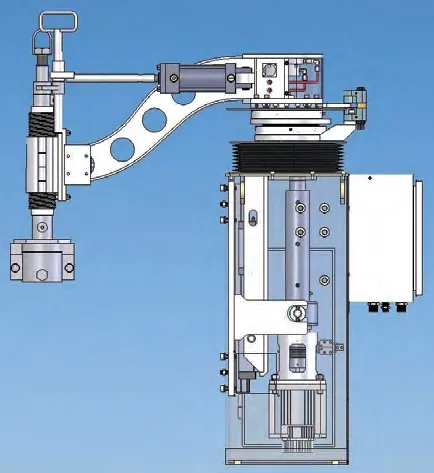
圖 3
2. 視頻澆注系統(tǒng)的工作原理及特點(diǎn)
改進(jìn)后的視頻澆注系統(tǒng)在兩個(gè)地方用到了智能視覺相機(jī)。一個(gè)相機(jī)用于視頻澆注檢測鐵液液位,另一個(gè)用于造型線的自動定位。
(1)用于監(jiān)測鐵液的相機(jī)能夠采集澆口杯內(nèi)熾熱的鐵液和型砂分別發(fā)出的亮暗反差很大的兩種光線畫面信號,并將信號作高分辨率的數(shù)字化處理,然后通過以太網(wǎng)通信將數(shù)字信號傳遞給PLC,經(jīng)過運(yùn)算建立了一個(gè)精確的澆口杯液位,并將其與從觸摸屏人機(jī)對話界面預(yù)先輸入的澆口杯內(nèi)鐵液液位設(shè)定值作比較,根據(jù)與設(shè)定值的誤差大小及運(yùn)動執(zhí)行機(jī)構(gòu)的當(dāng)前狀態(tài)信息,PLC按復(fù)雜的曲線控制數(shù)學(xué)模型計(jì)算發(fā)出指令,使運(yùn)動執(zhí)行機(jī)構(gòu)在伺服電動機(jī)的作用下作相應(yīng)的行程調(diào)整,以縮小上述的誤差值,從而達(dá)到閉環(huán)控制的目的。
視頻澆注的過程由圖4所示人機(jī)界面來監(jiān)控。
圖4中,1—澆注圖像顯示,包括澆口和自動定位口;2—澆注畫面感興趣區(qū)域的調(diào)節(jié),以及當(dāng)前用的模板型號的顯示;3—澆注參數(shù)的設(shè)置,包括初始澆注速度(Initial pour speed)、初始澆口杯液位(Initial cup)、澆注液位控制(Pour level control)、最終澆口液位(Final cup level)、結(jié)束澆注控制(End of pour control)等;4—澆注的動態(tài)圖像,包括澆注液位(Pourlevel)、澆注錯(cuò)誤(Pourerror)、塞桿位置(Rodposition)等,通過觀察這些畫面可以清楚地了解澆注是否穩(wěn)定;5—對當(dāng)天澆注型數(shù)的統(tǒng)計(jì),包括澆注總型數(shù),澆壞的型數(shù),澆好的型數(shù)等;6—澆注的控制按鈕,比如塞桿旋轉(zhuǎn)(Twist),沖桿控制,這兩個(gè)動作的手動自動切換,還有如澆注與自動澆注的切換等操作;7—預(yù)設(shè)澆注時(shí)間和實(shí)際澆注時(shí)間的顯示等。
(2)每當(dāng)一砂型澆注完成之后,造型線就會移動,移動完之后,經(jīng)常會出現(xiàn)澆口與澆注系統(tǒng)對不準(zhǔn)的情況,需要人工移動澆注機(jī),使?jié)部谂c砂型對準(zhǔn),然后澆注。每天這樣重復(fù)很多次,非常麻煩。
針對以上問題,我們給澆注系統(tǒng)增加了自動定位功能。自動定位就是當(dāng)造型線移動之后,如果澆口與砂型沒有對準(zhǔn),澆注機(jī)便會自己移位,并使?jié)沧⒖谂c砂型對準(zhǔn),達(dá)到準(zhǔn)確澆注。采用智能視覺相機(jī)監(jiān)視造型線上砂型的自動定位口,在澆注時(shí),智能視覺相機(jī)能夠正確監(jiān)測到這一型的槽口位置,并拍照記錄,當(dāng)下一次造型線移動后,智能相機(jī)又會拍照,并會通過以太網(wǎng)將圖像信號傳遞給PLC,PLC會將這一次的照片與上一次的作比較,如果偏差較大,PLC便會向控制造型線方向液壓缸動作的電磁比例閥發(fā)出信號,該閥便會通電打開,澆注機(jī)便會移動,使?jié)沧⒖谂c砂型對準(zhǔn),然后澆注。造型線方向上裝有位移傳感器,該傳感器發(fā)出的模擬量信號能夠正確地反饋造型線的實(shí)際位置。如果經(jīng)過定位還不能對準(zhǔn)的話,系統(tǒng)就會判斷為壞型。
圖5為自動定位原理。
視頻澆注系統(tǒng)考慮了一系列的隨時(shí)間變化的參數(shù),如澆注溜槽內(nèi)的鐵液液位,澆注孔的條件以及鐵液從澆口磚到達(dá)型腔時(shí)間的延遲等。該數(shù)學(xué)運(yùn)算模型功能強(qiáng)大,且有自身調(diào)節(jié)功能。因此,當(dāng)澆注作業(yè)過程中向澆包進(jìn)鐵口加金屬液的情況下還能保證系統(tǒng)的澆注精度。
相對于視頻澆注,還有一種澆注是激光澆注。就是在監(jiān)視澆口杯的地方將智能視覺相機(jī)換成了一套激光發(fā)射和接收裝置。發(fā)射的激光被澆口杯內(nèi)的金屬液面反射回來,由接收裝置接收。澆口杯內(nèi)金屬液面的變化,同時(shí)會使反射面升高或降低,引起光線到接收器的反射角度的變化。應(yīng)用三角測量技術(shù),便可計(jì)算出激光接收器和澆口杯液位之間距離變化,借此便可對塞桿的升程做出調(diào)整,以維持澆口杯液面高度的穩(wěn)定。但是此種澆注系統(tǒng)僅能在砂型上平面保持不變的情況下應(yīng)用,而且由于反射的激光束的強(qiáng)度衰減很快,故要求激光發(fā)射和接收裝置的安裝角度(與垂直面之間)不大于30°。這樣往往需要在鑄型澆口杯旁開一條特殊的溝槽,以使激光束能抵達(dá)澆口杯內(nèi)金屬液面,這無疑在某種程度上增加了無效鐵液的流失。
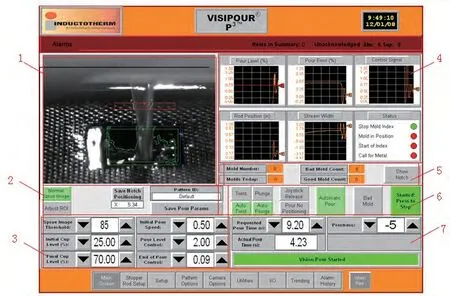
圖4 視頻澆注系統(tǒng)人機(jī)對話界面
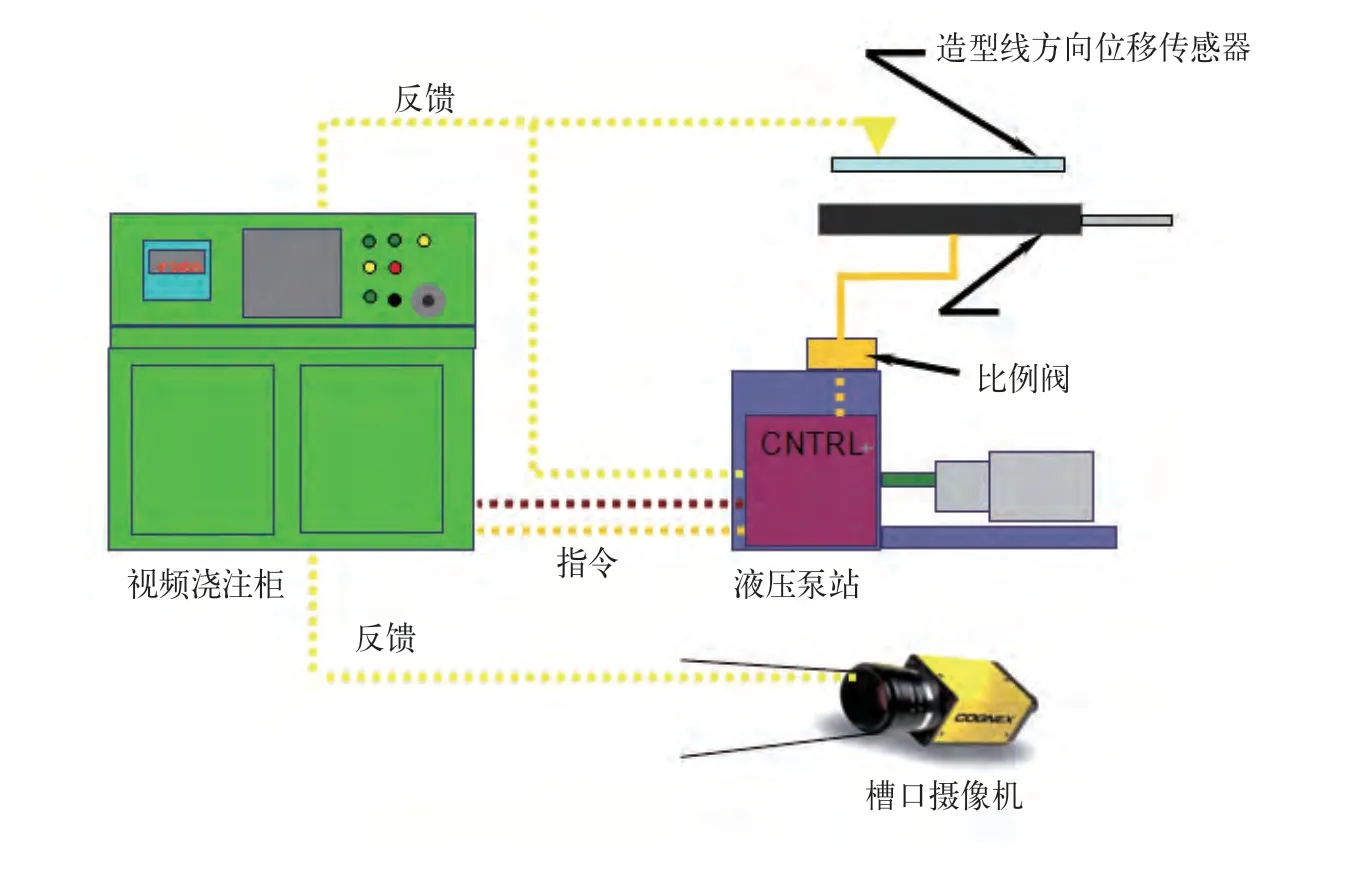
圖5 自動定位原理
3. 結(jié)語
在研發(fā)系統(tǒng)的時(shí)候,我們運(yùn)用了視覺系統(tǒng)和運(yùn)動控制的相關(guān)知識。最后的結(jié)果也證明視覺系統(tǒng)和運(yùn)動控制的結(jié)合,是工業(yè)監(jiān)視和完成高精度自動化操作的最有效手段。智能相機(jī)的高精度、高速度、多功能、小型化與集成化的優(yōu)點(diǎn)在這個(gè)系統(tǒng)中表現(xiàn)得淋漓盡致。隨著鑄造企業(yè)對產(chǎn)品的工藝要求,產(chǎn)量要求,以及自動化要求的不斷提高,相信基于智能視覺相機(jī)的視頻澆注系統(tǒng)會被越來越多的人所青睞。我們也在不斷努力,使該系統(tǒng)更加完善。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45