
基于6—UPS并聯(lián)構(gòu)型的運動學建模與仿真
2015-11-04 12:11:21李曉剛林新峰胡耀增
山東工業(yè)技術(shù) 2015年21期
關(guān)鍵詞:方向
李曉剛+林新峰+胡耀增

摘 要:為了更好的對機構(gòu)進行優(yōu)化設(shè)計和了解機構(gòu)的運動特性,對機構(gòu)進行運動學仿真分析是一種常要的研究方法;本文針對6-UPS并聯(lián)平臺結(jié)構(gòu),用adams軟件對其運動學的位移、速度、加速度進行仿真分析,并觀察驗證其合理性。
關(guān)鍵詞:并聯(lián)機構(gòu);6-UPS;adams仿真
DOI:10.16640/j.cnki.37-1222/t.2015.21.106
0 前沿
由于并聯(lián)機構(gòu)的設(shè)計和計算比較費時費力,因此研究者不斷地在尋找一種實用的方法以解決這個問題,借鑒于新的科學技術(shù),許多最新的高效的大型綜合的動力學仿真軟件都集成了許多強大的仿真和后處理功能,通過這些功能可以較快的建立仿真模型和對模型進行仿真研究,從而避免了求解繁瑣的方程組。
1 6-UPS并聯(lián)機構(gòu)建模
通常一個復雜的并聯(lián)機構(gòu)包含許多簡單的實體構(gòu)件,本文在對設(shè)計和仿真結(jié)果不產(chǎn)生影響的情況下,對整個機構(gòu)進行了必要的簡化,并添加必要的約束。建立6-UPS并聯(lián)平臺簡化后的虛擬樣機模型如圖1所示:
2 虛擬樣機工作環(huán)境的設(shè)置
為了使樣機模型仿真結(jié)果和后處理結(jié)果的輸出方便,本文對影響虛擬樣機的結(jié)果輸出可能產(chǎn)生的影響的相關(guān)因素進行了相關(guān)修改設(shè)置:選取通用的國際單位制,設(shè)置適當比例和重力的方向;為了方便區(qū)別和找尋某個部件,對部件的名稱進行了重命名,并用不同顏色進行區(qū)分。
建立完六自由度并聯(lián)平臺的虛擬樣機模型后,添加各種約束來約束和限制多余的約束,確保各個構(gòu)件組成一個完整的機械系統(tǒng)。
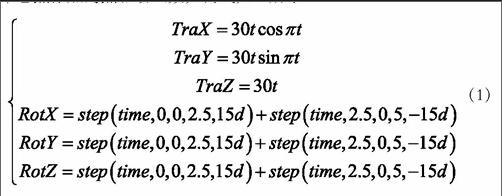
對虛擬樣機添加完約束之后,然后添加相應(yīng)的驅(qū)動,對動平臺中心點添加的點驅(qū)動函數(shù)如公式如1所示:
(1)
3 并聯(lián)平臺運動學的仿真
由于力和力矩對并聯(lián)平臺作用的情況產(chǎn)生的影響不是很大,這里對其不在考慮。由于并聯(lián)平臺的運動不是某個構(gòu)件的單一運動,而是許多構(gòu)件的協(xié)調(diào)運動,因此其驅(qū)動函數(shù)復雜且難以準確的確定,因此在仿真時,本文從運動學逆解著手來研究,觀察并且查看其是否發(fā)生部件相互干涉的情況和是否能夠達到預期的運動狀態(tài)。就并聯(lián)平臺而言,最能體現(xiàn)運動平臺的運動性能的是空間螺旋線運動。本文在保證各個鉸鏈在約束范圍內(nèi)轉(zhuǎn)動,同時通過添加空間螺旋線運動來進行運動學仿真,其空間運動運行軌跡如圖2所示。在運動平臺運動公式用如(2)所示的函數(shù)表示動平臺中心點的運動規(guī)律:
(2)
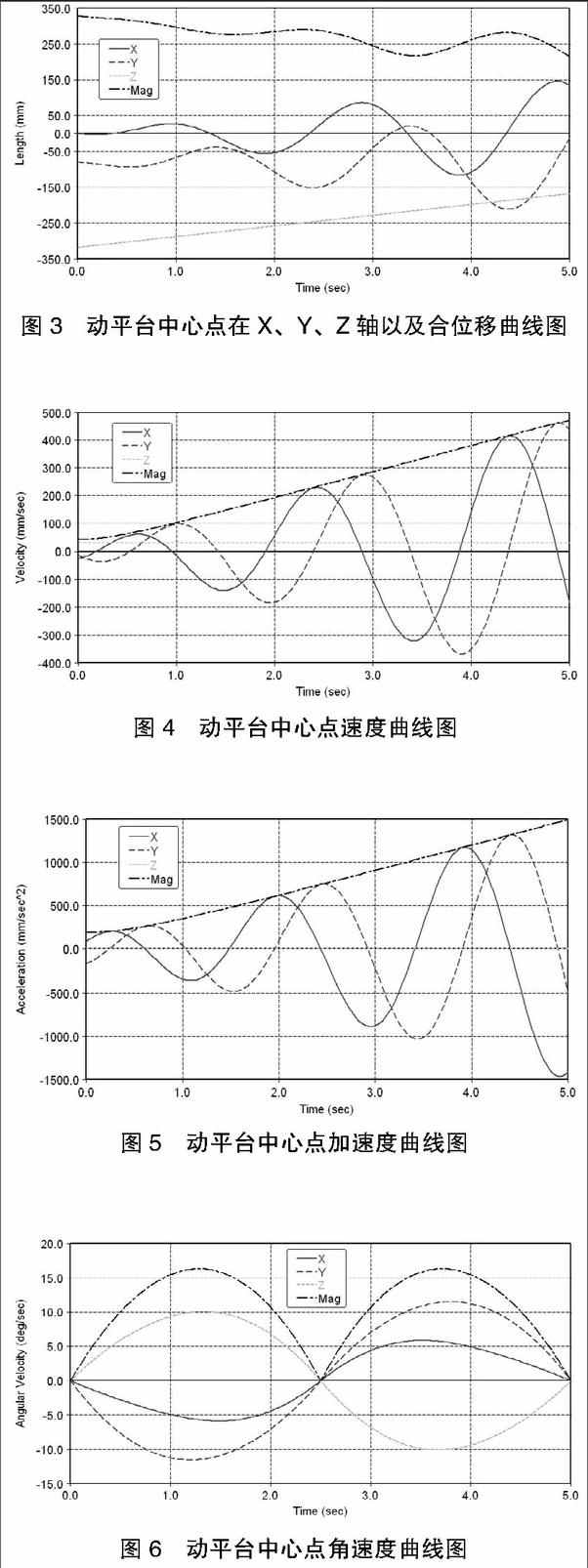
對動平臺中心點添加方程組(2)所表示的運動函數(shù),并對其進行逆解處理。在求解的過程中,動平臺中心在X和Y軸都是做正弦運動,且振幅不斷逐漸增加;而在Z軸則做直線運動,則此時動平臺中心點的各參數(shù)個曲線如圖3、4、5、6、7。
通過對圖3可以分析,動平臺中心點的位移沿Z方向做勻速直線運動,沿X和Y方向做振幅逐漸增大的正弦運動,合位移是X、Y、Z三個方向在空間的合成。
通過圖4和圖5可以看出,動平臺中心點速度沿Z方向做勻速運動,加速度為零;速度和加速度沿X、Y方向做振幅逐漸增大的正弦運動;合成方向速度和加速度則是對應(yīng)的各個方向速度在空間的合成。
從圖6和圖7可以看出,動平臺中心點角速度和角加速度在X和Y方向先增大后減小,角速度是按照近似正正弦運動,以2.6秒為分界線,加速度在2.6秒取得最值;而在Z方向加速度呈現(xiàn)出是先減小后增大的變化趨勢,在2.6秒達到了極小值。由于在2.6秒是角速度發(fā)生改變的時間,所以在角加速度的極大值發(fā)生在2.6秒,不論怎么變化,其合成角速度恒為正值。
4 結(jié)論
本文利用虛擬仿真分析軟件強大的建模和分析功能,對并聯(lián)機構(gòu)進行仿真,并對速度加速度和位移分析,并對模型參數(shù)進行了優(yōu)化設(shè)計,不僅縮短了研發(fā)周期的同時使得成本得到了降低,而且大大地提高了工作效率。
參考文獻:
[1]王知行,陳輝,石勇.用七軸聯(lián)動并串聯(lián)機床加工汽輪機葉片[J].世界制造技術(shù)與裝備市場,2002(06): 31-32.
[2]江崇民,王振宇,王哲元.XNZD2415型數(shù)控龍門并聯(lián)機床簡介[J].機械工程師,2003(02):53-54.
[3]黃玉美,史文浩,高峰等.混聯(lián)式六軸聯(lián)動數(shù)控機床6PM2的方案創(chuàng)新[J].制造技術(shù)與機床,2003(06):20-21.
[4]王希民,史家順,胡明等.PTT滑塊式并聯(lián)鋼錠修磨機床的開發(fā)[J].機械制造,2003(11):29-31.
[5]M. Weck,D. Staimer. Application Experience with a Hexapod Machine Tool for Machiningcomplex Aerospace Parts[J]. The 3rd Chemnitz Parallel Kinematics Seminar. Chemnitz,Germany,2002: 807-815.
作者簡介:李曉剛(1986-),男,山東臨沂人,碩士研究生,助教,研究方向:機械工程。endprint
猜你喜歡
計算機應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
