汽車電動助力轉向系統(tǒng)電控單元的研究及設計
2015-11-02 02:34:24張劭昀王念王義
電子設計工程 2015年24期
張劭昀,王念,王義
(1.貴州師范大學貴州貴陽550001;2.中航工業(yè)貴航股份華旭科技公司貴州貴陽550009)
汽車電動助力轉向系統(tǒng)電控單元的研究及設計
張劭昀1,王念2,王義1
(1.貴州師范大學貴州貴陽550001;2.中航工業(yè)貴航股份華旭科技公司貴州貴陽550009)
分析了電動助力轉向系統(tǒng)(EPS)的工作原理和數(shù)學模型,建立了直線型EPS助力特性曲線和增量式閉環(huán)PID控制策略。以MC9S12DP256單片機為核心,設計了控制器電源電路,信號處理電路、CAN通信電路、時鐘電路,并給出了軟件設計流程。本設計利用MC9S12DP256豐富的內部資源,引入了CAN技術,簡化了硬件電路,降低了電路之間的干擾,提高了控制系統(tǒng)的可靠性。
電動助力轉向;PID控制;CAN;MC9S12DP256
轉向系統(tǒng)是汽車的重要組成部分,其性能直接影響著汽車行駛的穩(wěn)定性和安全性。早期的汽車轉向系統(tǒng)為純機械轉向系統(tǒng),沒有助力,轉向動力完全由駕駛員提供,駕駛體驗差。從上世紀30年代以后,逐漸出現(xiàn)了助力轉向系統(tǒng)。目前,汽車助力轉向主要有3種形式:液壓助力轉向系統(tǒng)(Hydraulic Power Steering,HPS),電控式液壓助力轉向系統(tǒng)(Electric Hydraulic Power Steering,EHPS)以及電動助力轉向系統(tǒng)(Electric Power Steering System,EPS)[1]。相比前兩種,EPS由電機提供輔助力矩,沒有油系統(tǒng),很大程度降低了汽車轉向系統(tǒng)的復雜度,且在燃油效率、模塊化、助力效果和環(huán)境友好性等各方面具有明顯的優(yōu)勢。根據(jù)EPS助力電機在齒輪和轉向柱總成上位置的不同,EPS系統(tǒng)分為轉向柱助力式、齒條助力式、小齒輪助力式和雙小齒輪助力式4種類型。小齒輪和轉向柱助力式應用于輕型車輛,雙小齒輪助力式應用于重型車輛。它們在構成上都具有3個基本部件:電控單元(Electric Control Unit,ECU)、助力電機和安裝在轉向柱上的扭矩傳感器[2]。文中針對小型轎車,以美國Freescale公司的16位單片機MC9S12DP256為核心進行了EPS控制器的設計。
1 電動助力轉向系統(tǒng)結構和工作原理
電動助力轉向系統(tǒng)結構如圖1所示,主要由方向盤、扭矩傳感器、電子控制單元(ECU)、電機、電磁離合器、減速機構、齒輪齒條轉向器組成。在汽車發(fā)動機點火后,轉動方向盤時,由安裝在轉向軸上的扭矩傳感器測得轉向力矩,并送給ECU,ECU根據(jù)轉矩和車速,通過預先設置好的助力特性曲線和控制策略計算出一個電機所需的最佳電流,從而控制電機輸出力矩和轉動方向,然后經(jīng)過減速機構施加到轉向機構,最終得到一個與行駛工況相適應的轉向作用力,輔助駕駛員轉向[3]。
2 控制策略
2.1EPS模型建立
根據(jù)牛頓定律,可建立轉向系統(tǒng)數(shù)學模型[4]。
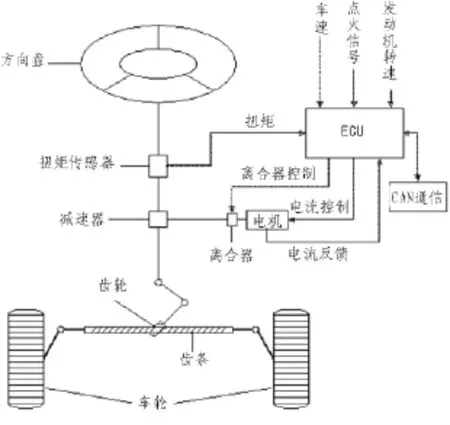
圖1 電動助力轉向系統(tǒng)結構圖Fig.1Structure diagram of EPS
轉矩測量值:

電機:

電機助力轉矩:

齒輪齒條:

轉向阻力:

其中:Th為方向盤輸入轉矩,Js為轉向柱、盤總成轉動慣量,Bs為輸入軸阻尼系數(shù),Ks為力矩傳感器剛度系數(shù),Tm電機輸出力矩,Km為助力電機和減速機構的剛度系數(shù),Jm為助力電機轉動慣量,Bm為助力電機阻尼系數(shù),M為齒條質量,Br為齒條和轉向輪粘性阻尼系數(shù),Kr為齒條當量剛度,G為助力機構傳動比,rp為小齒輪半徑,θs為方向盤轉角,θm為電機轉角,xr為齒條位移,F(xiàn)r為轉向阻力。
2.2助力特性曲線設計
EPS助力特性是駕駛員輸入轉矩和電機助力力矩(助力電流)之間的關系。汽車在行駛過程中,轉向阻力隨著車速的增加而降低。為了獲得汽車低速行駛時轉向的輕便性和高速行駛時的穩(wěn)定性,在同種行駛狀況下,電機助力力矩隨著車速的升高而減小,并在車速超出一定范圍時,電機不進行助力。常見的助力特性曲線有3種:直線型、折線型和曲線型。直線型助力特性曲線形式簡單,實際中容易調節(jié)和實現(xiàn)。因此,文中采用直線型助力特性進行控制器設計。直線型助力特性可表示為如下函數(shù)關系:

其中:Th為電機目標力矩,f(v)為車速感應系數(shù),Tmax為電機最大助力力矩,Td0為開始助力時駕駛員輸入最小力矩,Tdmax為電機提供最大助力時駕駛員輸入力矩。
助力特性參數(shù)確定[5-7]:Td0=1 Nm,Tdmax=7.6 Nm,Thmax= 21 Nm。車速感應系數(shù)按照表1所示規(guī)則確定(最終需要實車測試后進行修正),車速超過80 km/h時,電機不進行助力。

表1 pf1不同車速下的感應系數(shù)Tab.1The induction coefficient of different speed
根據(jù)上述參數(shù),助力特性曲線設計如圖2所示。
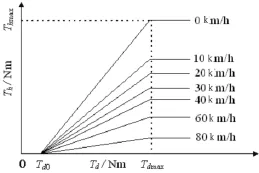
圖2 助力特性曲線Fig.2Assist characteristics curves
電機目標電流可以由式(8)獲得:

式中,ki為電機轉矩系數(shù),G為電機減速機構傳動比。
2.3控制算法
EPS系統(tǒng)控制是對電機電流大小和方向的控制。其控制算法的好壞直接影響著轉向系統(tǒng)的性能。本文采用目前廣泛應用于工業(yè)控制領域的PID控制算法。PID控制穩(wěn)定性和可靠性高、實時性強、且控制與調試方法簡單,易于實現(xiàn),適合用于汽車電動助力轉向系統(tǒng)的控制。因此,PID控制是現(xiàn)階段EPS控制系統(tǒng)主要的控制策略。
PID控制的表達式可表示為:

其中:r(t)為助力電機電流目標值,y(t)是控制系統(tǒng)實際輸出值,u(t)為PID控制器的輸出信號,Ti為積分時間常數(shù),Td為微分時間常數(shù)。EPS控制系統(tǒng)的核心是采用數(shù)字信號的單片機。因此,需要對式(10)進行如下處理:

為了減小計算量,提高轉向系統(tǒng)的實時性,本設計采用增量式PID控制,用控制量的增量Δu作為作為控制器的輸出。其實現(xiàn)方法如下:
設助力電機目標電流為i,實際當前助力電流為io,則控制偏差為:

助力電機目標電流可以由單片機根據(jù)當前車速、輸入轉矩、助力特性曲線計算得到。然后由式(11)、(12)、(13)可獲得對應的PWM增量Δu。
PID參數(shù)可以由試湊發(fā)初步得到,然后根據(jù)試驗結果進行修正。
3 硬件設計
3.1總體設計
單片機是控制器的核心,其選型需要考慮適用性、可靠性、片內資源、價格等多種因素。單片機選型恰當與否直接影響機構控制系統(tǒng)的性能及設計難易程度度。本設計采用Freescale公司的16位高精度MC9S12DP256單片機。MC9S12DP256內置5個CAN模塊、2個8通道10位A/D轉換模塊、8個PWM通道,總線速度25 MHz,采用5 V供電,112腳LQFP封裝。此單片機,內部資源豐富,可大大簡化控制系統(tǒng)硬件電路,其可靠性高,非常適用于EPS控制。設計中沒有用到的管腳引到電路板上,以便于后續(xù)開發(fā)。
硬件設計如圖3所示。車速、發(fā)動機、轉矩信號經(jīng)處理后送給MC9S12DP256單片機,經(jīng)單片機計算后,得到電機助力電流值,經(jīng)驅動電路后作用于助力電機,控制電機輸出力矩的大小和方向,同時對電機電流進行采樣,并送回單片機,形成閉環(huán)控制。在助力控制基礎上,設計了電機保護電路和故障診斷與提示電路。一旦檢測到故障存在,立即斷開離合器,改用純手動轉向,并發(fā)出故障信號,從而保證了行車安全。
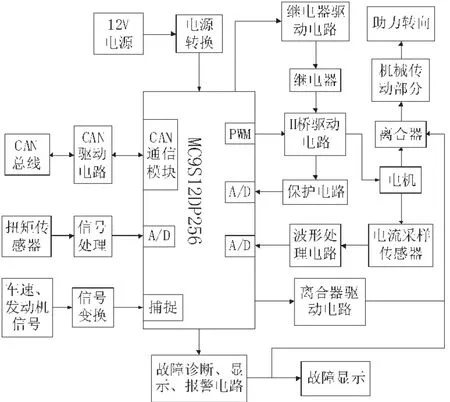
圖3 EPS電控單元硬件電路原理Fig.3Hardware circuit principle of ECU
3.2控制系統(tǒng)硬件電路設計
硬件電路設計主要包括電源轉換電路、扭矩信號處理電路、車速信號處理電路、CAN通信電路、時鐘電路。具體設計如下:
電源轉換由于單片機工作時管腳電壓為+5 V供電,而車載電源電壓為+12 V。因此,需要對+12 V電壓進行轉換,變成+5 V。本設計中采用7805電壓轉換芯片進行電壓變換。
扭矩信號處理由于扭轉傳感器獲得的是一些微弱的小信號,容易受干擾,因此需要對其進行濾波處理。本設計采用型濾波電路,R12取大電阻,提高輸入阻抗。
車速處理電路車速信號為+12 V單極性方波,電壓太高,不能直接用于單片機,需要將其變換為+5 V以內的方波。利用LM358對其進行處理,經(jīng)轉換后得到高電平為3.72 V,低電平為0.01V的方波信號[8]。
CAN總線驅動電路MC9S12DP256內部集成了CAN總線控制器,CAN驅動電路只需要物理層驅動即可。本設計選用82C250芯片進行設計。
時鐘電路時鐘是單片機工作的基礎。MC9S12DP256單片機內部集成了壓控振蕩器,可在其43、44和46、47引腳分別接上鎖相環(huán)電路和16MHz的晶振電路,組成MC9S12DP256時鐘電路,提供25MHz的時鐘信號。
具體電路設計如圖4所示。
4 系統(tǒng)軟件設計
EPS控制軟件采用模塊化設計,包括進行系統(tǒng)初始化、信號采集、控制狀態(tài)判、控制模式判斷、PWM占空比計算、系統(tǒng)狀態(tài)監(jiān)控及保護、電流閉環(huán)模塊、通信模塊等。EPS控制系統(tǒng)需要同時執(zhí)行多個任務,為了保證系統(tǒng)的實時性和可靠性,采用中斷服務方式,將整個軟件部分分為主程序和中斷服務子程序。主程序設計流程如圖5所示。
5 結束語
文中分析了汽車電動助力轉向系統(tǒng)的工作原理,設計了直線型助力特性曲線,建立了增量式閉環(huán)PID控制策略,減小了芯片的計算量,增強了系統(tǒng)的助力跟隨性。利用MC9S12DP256單片機的豐富內部資源,簡化了EPS硬件電路系統(tǒng),降低了電路間的干擾,從而提升了系統(tǒng)可靠性,設計了基于MC9S12DP256的EPS控制系統(tǒng)硬件電路,并給出了軟件設計流程。本文設計的EPS系統(tǒng)可以編寫多種EPS控制算法,有利于后續(xù)深入研究。對于控制性能的優(yōu)化將在進一步的控制策略研究和試驗中進行。
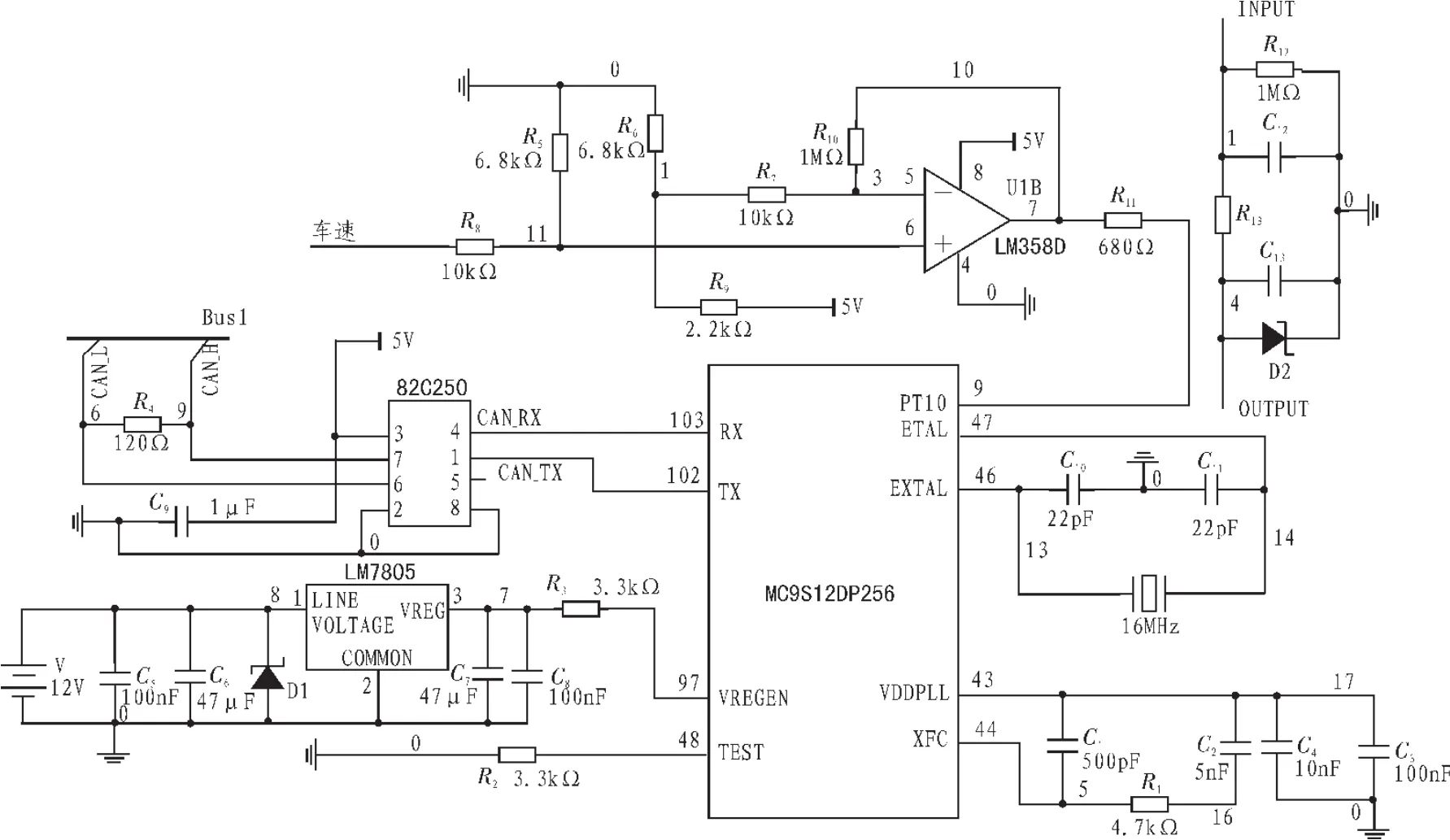
圖4 MC9S12DP256系統(tǒng)電路Fig.4System circuit based on MC9S12DP256
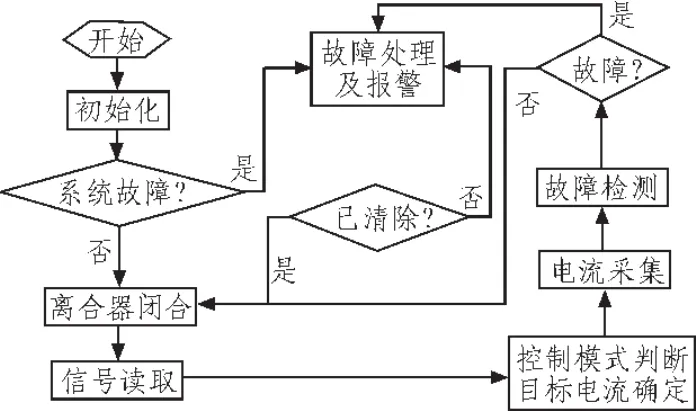
圖5 主程序流程Fig.5Main program process
[1]鄭曉琳,馬紀明.汽車電動助力系統(tǒng)性能仿真與設計分析[J].計算機仿真,2014,31(3):175-178.
[2]熊亮,劉和平,彭東林.無轉矩傳感器汽車電動助力轉向系統(tǒng)的控制策略[J].汽車工程,2013,35(8):711-715.
[3]邱亞琴,張向文.電動助力轉向系統(tǒng)的滑模控制算法研究[J].計算機仿真,2013,30(8):159-163.
[4]江浩斌,唐斌,耿國慶.無刷直流電機助力式EPS控制器設計與試驗[J].汽車工程,2011,33(11):980-984.
[5]Toshikide Satake,Masahiko Kurishige,Noriyuki moue,et al. Enaluation of EPS Control Strategy Using Driviing simulator EPS[J].SAE paper,2003(82):01-05.
[6]Masahiko Kurishige,Shunichi Wada,Takyayuki Kifuku,et al.A New EPS control Strategy to Improve Steering Wheel Returnability[J].SAE Paper,2000(15):01-08.
[7]楊樹松.電動助力轉向系統(tǒng)的控制研究[D].洛陽:河南科技大學,2011.
[8]劉元開.汽車電動助力轉向模糊控制器研究[D].成都:電子科技大學,2014.
Study and design of ECU for automobile electric power steering system
ZHANG Shao-yun1,WANG Nian2,WANG Yi1
(1.Guizhou Normal University,Guiyang 550001,China;2.Avic Guihang Shares Huaxu Scientifec and Technical Company,Guiyang 550009,China)
The working principle and the mathematical models of electric power steering system(EPS)were analyzed.Linear assist characteristic curves and incremental PID closed-loop control strategy of EPS were established.MC9S12DP256 chip as the core,power supply circuit,signal processing circuit,CAN communication circuit and clock circuit of the controller were designed and the software design process were given.Using the abundant internal resource of MC9S12DP256,introducing CAN technology,this design simplified the hardware circuit,thus it reduced the interference of the circuits and improved the reliability of the control system.
electric power steering system;PID control;CAN;MC9S12DP256
TN409
A
1674-6236(2015)24-0152-04
2015-02-09稿件編號:201502085
貴州省科技廳國際科技合作計劃項目(黔科合外G字[2014]7007號);貴州省科技廳省校合作計劃項目(黔科合[2013]7001);貴州省普通高等學校汽車電子技術特色重點實驗室(黔教合KY字[2014]213)
張劭昀(1987—),男,陜西咸陽人,碩士研究生。研究方向:電路與系統(tǒng)、智能網(wǎng)絡控制。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
