科學和技術任務:空間運輸系統-77航天任務18年回顧(四)
2015-11-02 08:56:46BenEvans劉天雄編譯
衛星與網絡 2015年3期
關鍵詞:實驗
+ 美:Ben Evans, 劉天雄 編譯
科學和技術任務:空間運輸系統-77航天任務18年回顧(四)
+ 美:Ben Evans, 劉天雄 編譯
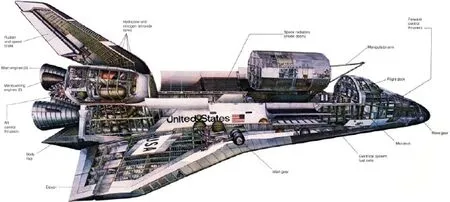
圖31 航天飛機內部結構布局
為執行此次STS-77航天任務,在1995年6月,任務指令長John Casper,飛行員Curt Brown,任務專家Andy Thomas、Dan Bursch、Mario Runco以及加拿大宇航員Marc Garneau就開始了針對性地任務訓練。STS-77航天任務最初計劃在1996年5月16日發射,但分析表明,5月16日的發射窗口不滿足美國國家航空航天局NASA東部發射場的火箭測控跟蹤弧段設計要求,由此將發射日期推遲到美國東部時間1996年5月19日凌晨6∶30分。
十八年前的這一星期(1996年5月的第三個星期),六名宇航員搭乘奮進號(Endeavour)航天飛機在LEO軌道上完成了空間運輸系統STS(Space Transportation System)30年歷史中最具復雜性的一次空間探索任務。正如前文所述,STS-77航天任務利用商業化空間實驗室Spacehab-4需要開展大量空間科學試驗項目,同時在軌部署和回收自由飛行的衛星,因此STS-77航天任務六名宇航員不得不在為期10天的空間試驗任務中的第一天就得盡可能多地啟動試驗項目。
奮進號航天飛機進入預定軌道后不久,軌道飛行運載器(OV)液壓動力單元(hydraulic power units)的冷卻裝置出現問題,但暫不影響宇航員開展空間任務。宇航員Andy Thomas和Marc Garneau首先打開商業化空間實驗室Spacehab-4的艙門蓋,進入實驗室后按程序要求給啟動各個試驗裝置。隨后,Andy Thomas檢查了由加拿大研制的奮進號航天飛機的遙控操作系統RMS(Remote Manipulator System)機械手臂,以確保能夠順利開展在軌釋放小型自由飛行器SPARTAN-207。
(1){cM,cs,cd,cl}={500,95,50,10},{cAn_A,cAf_A,cAn_M,cAf_M,cAr_A,cAr_M}={12,15,24,30,200,500},{cBn_A,cBf_A,cBn_M,cBf_M,cBr_A,cBr_M}={22,25,34,40,240,540};
在STS-77航天任務中首次執行航天飛機任務的宇航員是Andy Thomas,他作為本次有效載荷試驗指揮,對本次任務的研究目標和科學目的負全部責任。Thomas于1951年12月18日出生在澳大利亞南部城市Adelaide,Thomas的父親后來回憶道,他的兒子執迷與空間探索,在孩提時代就利用紙板和塑料制作了一個火箭模型。Thomas在澳大利亞Adelaide市接受了完整的教育,1973年畢業于Adelaide大學,獲得機械工程碩士學位,并繼續攻讀博士學位。1977年,在獲得博士學位前夕,美國Lockheed航空系統公司聘任Thomas為公司的研究科學家,負責調查研究流體動力學不穩定性控制以及飛機氣動阻力問題的研究。1980年,Thomas年被提升為Lockheed航空系統公司首席空氣動力學科學家,1983年,他擔任公司先進飛行科學部主任,負責先進空氣動力學問題研究以及航空器飛行試驗工作。
Thomas認為良好的教育是獲得機會的堅實基礎,而朝著航天夢想有意識的不斷努力則使這種機會成為可能。Thomas在接受美國國家航空航天局NASA宇航員面試官面試時曾說過:“作為在澳大利亞長大的年輕人,能被遴選稱為美國國家航空航天局NASA的宇航員只是一個美麗的神話,我真的不認為這種可能性會實現”。“我充分利用職業生涯的各個環節,提升解決問題的能力同時并獲得相關技術經驗,這使我成長為宇航員的有力競爭者”。
在1996年5月24日的第二次交會對接試驗中,Casper 和 Brown駕駛奮進號航天飛機靠近被動型空氣動力穩定磁阻尼航天器PAMS距離約520m的位置處,并將相對位置保持約6小時,期間商業化空間實驗室“Spacehab-4”中的“空間試驗單元SEF(Space Experiment Facility)出現故障,Andy Thomas負責排除了該故障”。從宇航員拍攝的錄像中可以確認,盡管超出預期的穩定時間,被動型空氣動力穩定磁阻尼航天器PAMS在氣動阻力的作用下,姿態已經穩定。由此,第三次和第四次交互對接試驗不得不較計劃推遲24小時執行,直到5月26日才完成全部的對接試驗。這里需要指出的是激光姿態測量系統AMS的測量精度是十分之一度,可以提供被動型空氣動力穩定磁阻尼航天器PAMS高精度的動態和相對運動測量數據。雖然試驗證明激光姿態測量系統AMS具有追蹤小衛星的能力,但是,激光測量系統有時可能會將目標誤鎖定到不明物體上。
④混合型河道。混合型河道是指在河道沿線既分布有河段,也分布有水塘和濕地,形成多級河道。其結構如圖4所示。
這是首次提出“三大能力”.幾何教學目標是:使學生掌握系統的幾何知識,培養推理論證的能力,發展空間想象能力.
加拿大深度參與了本次STS-77航天任務,特別是加拿大籍宇航員Joseph Jean-Pierre Marc Garneau作為任務專家參加本次航天實驗任務。Garneau是加拿大第一位宇航員,曾經在1984年10月作為有效載荷專家參加了STS-41G航天飛機空間實驗任務。Garneau于1949年2月23日出生在加拿大的Quebec市,Garneau的父親是一名加拿大陸軍軍官,Garneau在接受美國國家航空航天局NASA宇航員面試官面試時曾說過:“在我成長過程中,我去過相當多的地方旅行”,“我曾經想到長大后也會成為一名職業軍人,特別想加入海軍”。Garneau曾這樣解釋他的決心——喜愛冒險。Garneau在加拿大的Quebec市接受了完整的教育,1970年畢業于加拿大皇家軍事學院,獲得工程物理碩士學位。隨后Garneau到位于英國倫敦的帝國理工大學攻讀電子工程博士學位,1973年獲得博士學位后,Garneau加入加拿大海軍司令部,擔任海軍工程師。在加拿大海軍司令部工作期間,Garneau設計開發了一個仿真系統,用于培訓軍官使用“部落級破壞者(Tribal-class destroyers)”導彈系統。隨后,Garneau在加拿大參謀學院學習,并于1982年畢業,Garneau被提升授予加拿大海軍中校軍銜。1983年,Garneau來到Ottawa,負責設計加拿大海軍通信和電子戰系統。

圖32 STS-77飛行任務中奮進號航天飛機的有效載荷(前部為商業化空間實驗室“Spacehab-4”,后部為SPARTAN- 207飛行器)
以往的天文學觀測任務中,一般通過攜帶大量的、價格不菲的脫水液態氦氣或者液態氫氣實現光學載荷工作時所需要的10開氏度的低溫環境,但是當液態氦氣或者液態氫氣等致冷劑消耗殆盡時,就不能再為光學載荷提供低溫環境,由此也就導致光學載荷不能有效地工作。美國國家航空航天局NASA認為,“吸附式高效冷卻器實驗BETSCE有望為光學載荷提供沒有振動環境影響的、10年甚至更長工作壽命的冷卻器”,“吸附式高效冷卻器實驗BETSCE突破了低溫實驗環境的新技術,未來具有廣闊的用于前景,不同的空間任務都將受益于這項新奇的技術”。
如果說奮進號航天飛機的宇航員艙和商業化空間實驗室Spacehab-4是本次STS-77航天任務中宇航員最繁忙的工作區,那么與此對應的有效載荷艙是最繁忙的試驗區,如圖32所示。最具有前瞻性的實驗項目是“10開氏度吸附式高效冷卻器實驗BETSCE(Brilliant Eyes Ten Kelvin Sorption Cryocooler Experiment)”,冷卻器可以實現幾乎絕對零開氏度(-273.15攝氏度)的溫度環境,未來可以用于紅外和其他敏感器的快速致冷要求。吸附式高效冷卻器實驗BETSCE的目的是研發具有較高可靠性的吸附式冷卻器,該冷卻器不產生對航天器有不利影響的振動環境,可以將紅外敏感器冷卻到10開氏度(-263.15攝氏度)。吸附式高效冷卻器的工作原理是利用一種特殊的金屬氫化物的金屬合金粉末制備成為氫致冷劑,利用氫致冷劑的逆化學反應過程需要吸收大量熱量的原理,實現致冷。在吸附式高效冷卻器的壓縮機中,金屬氫化物粉末首先被加熱以釋放被壓縮的氫氣,然后將金屬氫化物粉末冷卻到室溫,同時收集氫氣并降低氫氣的溫度,通過連續的加熱和冷卻金屬粉末,可以實現氫氣循環以及致冷循環。在致冷器的冷卻端,通過迅速膨脹被壓縮的氫氣而可以獲得10開氏度的低溫環境。這種膨脹可以將氫氣凝凍,并由此產生固態冰塊。再通過升華這些固態冰塊來吸收紅外敏感器等裝置工作時產生的熱量。循環往復最終實現10開氏度的低溫環境。
Andy Thomas的首次空間飛行給了他全新的體驗,同時需要克服許多困難。Thomas 曾說:“雖然空間環境完全不同于地面環境而且是不自然的,但是你的身體已經開始接受這種不自然的環境而心理上已經認為它是自然的”。“我以正常的方式去體驗失重狀態,所有的東西都漂浮在空間,包括我自身。人體自身的適應能力的確令我們稱奇。當然,當我返回地球后,我也需要我們的身體去適應地球的重力環境。我感覺我的所有器官好像被拔出體外,包括我的胳膊和頭顱。當我站起來時,能夠感覺到自己全身笨重的身體重量,你真的能感覺到重力的存在。如果你不經歷這樣的環境,你永遠不可能感受到重力的作用”。
美國國家航空航天局NASA的Goddard空間飛行中心GSFC(Goddard Space Flight Center)在奮進號航天飛機有效載荷艙搭載了“先進空間任務技術實驗TEAMS(Technology Experiments for Advancing Missions in Space)”,實驗項目包括在軌測量GPS美國全球定位系統導航衛星的姿態和導航數據,評估美國GPS全球定位系統技術(注:1993年美國國防部宣布GPS系統提供初始運行服務IOC,1995年GPS系統提供完全運行服務FOC);衛星推進系統推進劑儲箱二次加注實驗VTRE(Vented Tank Resupply Experiment),目的是評估推進劑在軌加注改進方法的可行性;液態金屬熱實驗LMTE(Liquid Metal Thermal Experiment),目的是驗證微重力環境對工質為液態金屬鉀的金屬熱管(注:一種用于航天器熱交換的裝置件)工作效率的影響;被動型空氣動力穩定磁阻尼航天器-航天器實驗單元PAMS-STU(Passive Aerodynamically Stabilized Magnetically Damped Satellite-Satellite Test Unit),用于論證“空氣動力穩定”的機理,期望通過降低或者消除航天器姿態控制系統對推進劑的需求量,延長航天器的在軌壽命。美國國家航空航天局NASA認為,“標槍的飛行原理就是空氣動力穩定”,“標槍的頭部是金屬集中質量塊,一旦標槍被投擲出去,它一定會頭超前飛行,以同樣的工作方式,被動型空氣動力穩定磁阻尼航天器PAMS最終會朝著較重的質量端向軌道方向飛行,這項技術將可以部分用于小衛星的姿態控制”。1996年5月29日,乘奮進號(Endeavour)航天飛機降落在Kennedy空間中心KSC(Kennedy Space Center),如圖33所示。
1983年12月,Garneau被選為美國國家航空航天局NASA的宇航員候選人。1984年2月,Garneau再次到加拿大國防部接受全職培訓。1984年10月作為有效載荷專家Garneau參加了STS-41G航天飛機空間實驗任務后,Garneau被提升授予加拿大海軍上校軍銜,1989年從海軍退役,并擔任加拿大宇航員項目局CAP(Canadian Astronaut Programme)的副局長。1992年年中,Garneau被美國國家航空航天局NASA挑選為任務專家培訓教師。
生命體征監測設備通過調用Bluetooth 接口,獲取自帶的藍牙適配器,并開啟藍牙功能。通過調用藍牙設備搜索接口函數,對周邊的藍牙設備終端進行掃描,當搜索到匹配的藍牙適配器時,則進行設備注冊、建立連接并停止掃描,至此藍牙掃描工作完成。掃描并匹配成功的設備名稱和設備MAC 地址將分別儲存在藍牙搜索的公有成員變量中,當掃描結束后,會向生命體征監測設備藍牙適配器發送一個類型為0x01 的句柄消息。同時handleMessage 接口函數也會收到類型為0x01 的消息,掃描程序通過設備遍歷對周邊的設備進行逐個匹配直到找到符合要求的藍牙終端設備。

圖33 乘奮進號航天飛機降落在Kennedy空間中心(背景為Kennedy空間中心航天器總裝廠房VAB(Vehicle Assembly Building))
凡做人不能太張狂太鋒芒畢露,喜而不語,低調沉斂,是一種智慧。生活從來都是智慧的較量,最富有的人是智者,最寶貴的財富是智慧。
在奮進號航天飛機頭部的中部艙板(middeck)處,如圖31所示,將開展“免疫3號實驗”以驗證胰島素類物質是否具備阻止或者減少微重力環境對老鼠免疫系統和骨骼系統有害影響的能力,其中也包括主導因素分析。在中部艙板同時還開展三個不同的蛋白質晶體的結晶實驗,實驗目標是識別疾病因子的生長區,以及研發透氣性聚合物膜片GPPM(Gas Permeable Polymer Membrane),這種增強型聚合物膜片可以用來制造剛性的、具有透氣能力的相機鏡頭。美國國家健康研究所NIH(National Institutes of Health)提供了生物組織培養器,實驗目標是識別微重力環境對小雞胚胎肌肉和骨骼細胞發育的影響。此外,還有類似目標的實驗,包括的微重力環境對煙草天蛾幼蟲的蛻變過程、肌肉蛋白質合成過程、授精過程以及海星、貽貝以及海膽等小型水生生物體的胚胎發育過程的影響。上述實驗是奮進號航天飛機起飛幾個小時后不久,均是由Mario Runco首先啟動的實驗項目。
在本次航天任務的第4天,即1996年5月22日,按計劃開展了被動型空氣動力穩定磁阻尼航天器-航天器實驗單元PAMS-STU實驗項目,美國東部時間5月22日上午5點18分,Runco把位于奮進號航天飛機有效載荷艙后部的圓柱形的衛星釋放到艙外,衛星大小為60 x 90 cm。為了評估衛星利用氣動力學條件實現自主姿態穩定的時間和效能,該衛星被有意以旋轉的、不穩定的姿態釋放到軌道空間。Casper 和 Brown將奮進號航天飛機機動到距釋放點14.6 km位置處,開展首次交匯對接實驗。大約4.5小時后,利用奮進號航天飛機機載荷艙的激光姿態測量系統AMS(Attitude Measurement System),當Casper 和 Brown駕駛奮進號航天飛機靠近被動型空氣動力穩定磁阻尼航天器PAMS距離約600m的位置處時,他們發現該被動型空氣動力穩定磁阻尼航天器PAMS的姿態尚未達到穩定狀態,因此,交會對接試驗時對接結構不能正常工作。Casper 和 Brown不得不駕駛奮進號航天飛機離開被動型空氣動力穩定磁阻尼航天器PAMS距離約103 km的安全位置處,并計劃在5月24日和25日,再次開展兩次交會對接試驗。
為了成為美國國家航空航天局NASA的宇航員夢想,Thomas在1986年12月加入了美國國籍,1987年,Thomas擔任Lockheed航空系統公司先進飛行科學部經理,1989年,Thomas移居到美國加利福尼亞州東北部的Pasadena市,并在美國國家航空航天局NASA的噴氣推進實驗室JPL(Jet Propulsion Laboratory)工作,隨后成為JPL的微重力研究小組的主管。三年后,即1986年12月,Thomas被選為美國國家航空航天局NASA的宇航員候選人。Thomas終于實現了他的畢生夢想,他的成功歸功于良好的教育。其實,Thomas治學的態度為他打開了人生豐富多彩的大門。正如他自己總結的那樣,“教育能夠為你打開一個你所不能想象的大門,同樣也能永遠保持關閉它”。
在1996年5月26日的第三次交會對接試驗前,奮進號航天飛機距離被動型空氣動力穩定磁阻尼航天器PAMS約103 km的位置處,Casper啟動了航天飛機控制系統的推力器,Casper 和 Brown駕駛奮進號航天飛機靠近被動型空氣動力穩定磁阻尼航天器PAMS距離約550m的位置處。當奮進號航天飛機的有效載荷艙朝向航天器PAMS時,美國國家航空航天局NASA的Goddard空間飛行中心GSFC地面遙控激光姿態測量系統AMS追蹤航天器PAMS,當奮進號航天飛機靠近被動型空氣動力穩定磁阻尼航天器PAMS距離約500m的位置處時,在該位置處保持約7小時45分鐘,時間超出計劃70分鐘。在第三次交會對接試驗期間,衛星姿態保持穩定,驗證了航天器啟動穩定概念的正確性。
習作能力是學生語文素養的一個重要組成部分,也是學生與人交流、學好其他功課的一項重要能力。習作教學是語文教學的一個重點,也是一個難點。
釋放航天器PAMS的最后階段,STS-77航天任務已接近尾聲,宇航員們開始進行奮進號航天飛機在Kennedy空間中心KSC著陸的準備工作。美國國家航空航天局NASA期望航天器PAMS能夠再入高層大氣層,并在再入的過程中與大氣摩擦并燒毀,航天器軌道動力學專家預計航天器PAMS會在軌道上運行到1997年1月(航天器PAMS最終于1996年12月26日墜入大氣層)。Kennedy空間中心KSC和Edwards空軍基地的天氣預報表明,5月29日當天,在兩個著陸點均有兩個比較適宜的著陸窗口。美國國家航空航天局NASA采取了在Kennedy空間中心KSC著陸的方案,美國東部時間5月29日上午6點09分,Casper 啟動奮進號航天飛機離軌程序,一小時后,即7點09分,Casper駕駛奮進號航天飛機平穩地降落到Kennedy空間中心KSC的33號跑道上。
STS-77航天任務是航天飛機第一次利用自身Block I型主發動機進入預定空間軌道,也是位于美國Texas州東南部城市Houston的Johnson空間中心JSC(Johnson Space Center)的新的任務控制中心MCC(Mission Control Center)第一次全面執行航天器飛行控制任務。

宇航員Mario Runco在奮進號內工作 圖片來源:美國宇航局
后記:由于運營成本高、安全系數低,美國航天飛機(Space Shuttle)已在2011年全部退役,空間運輸系統(Space Transportation System)不得不依賴俄羅斯飛船,按最新合同,美國宇航員往返空間站單人“票價”超過7000萬美元。為了擺脫這一尷尬局面,美國大力推進私營企業進入商業發射領域。
美國國家航空航天局NASA在2014年9月16日宣布,波音公司和太空探索技術公司贏得共計68億美元的商業載人航天活動,將建造商業“太空巴士”運送美國宇航員往返國際空間站。其中波音公司將獲得42億美元建造CST-100航天器,而太空探索技術公司將獲得26億美元建造載人版“龍”飛船。CST-100航天器和“龍”飛船都是在上世紀美國登月的“阿波羅”飛船基礎上建造,均能搭載7名宇航員上天。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
