基于水動力性能的TLP結構選型研究
2015-10-30 08:10:00錢佳煜孫麗萍宋林峰
海洋工程 2015年5期
關鍵詞:分析
錢佳煜,孫麗萍,宋林峰
(哈爾濱工程大學 船舶工程學院,黑龍江 哈爾濱 150001)
基于水動力性能的TLP結構選型研究
錢佳煜,孫麗萍,宋林峰
(哈爾濱工程大學 船舶工程學院,黑龍江 哈爾濱 150001)
為了解決四種典型結構型式的張力腿平臺在中國南海荔灣氣田極端海況條件下的選型問題,采用新的相似原則以保證平臺的設計擁有相同的相似條件。這些相似條件確保了四種平臺具有相似的水動力性能和系泊性能。考慮平臺和系泊系統包括頂張緊式立管(TTRs)、鋼懸鏈式立管(SCRs)及筋腱之間的耦合效應,運用動態時域耦合分析方法計算得到平臺的動力響應,并通過對比不同結構型式的平臺在作業、極限及生存工況下的運動響應以得到最優水動力性能平臺。文中還分別對四種張力腿平臺的動態響應、筋腱受力、氣隙分析和動暈環境條件進行對比分析,分析結果為實際工程提供參考。
張力腿平臺;平臺選型;水動力響應;氣隙分析;動暈環境條件分析
中國南海擁有豐富的油氣資源,其中荔灣氣田位于香港以南約300公里處,水深為1 500 m。根據南海實際環境條件,我國南海深水油氣田浮式鉆采平臺選型給出如下建議:在1 500 m以內的深水范圍應以張力腿平臺或半潛式平臺作為首選[1]。為開發荔灣3- 1氣田及其周圍潛在的油氣儲備,對于南海張力腿平臺的選型研究顯得十分迫切。
張力腿平臺最顯著的特點是靠筋腱來系泊平臺,筋腱始終保持受拉狀態,而且張力必須保證不能低于一定數值,預張力則由平臺浮體的剩余浮力提供,因此其對上部載荷的變化是敏感的。由于張力腿平臺(Tension Leg Platform- TLP)的系泊方式決定了平臺在平面外的橫搖、縱搖、垂蕩等運動近于剛性,而在平面內的橫蕩、縱蕩、首搖等運動顯示出柔性,環境載荷由平面內運動的慣性力而不是結構內力來平衡。張力腿長度與水深成線性關系,而且筋腱造價較高,水深一般限制在2 000 m之內。TLP有四種類型,分別是傳統式張力腿平臺(Conventional Tension Leg Platform- CTLP)、延展式張力腿平臺(Extended Tension Leg Platform- ETLP?)、MOSES?平臺和SeaStar?張力腿平臺。CTLP具有四根由四個浮筒相互連接的立柱。ETLP的結構與CTLP相似,但在結構上做了一些改進,ETLP的每個立柱都增加了延伸的浮箱。MOSES平臺是由MOSES公司設計研發,其平臺的立柱更集中于平臺的中心,四根浮箱用來連接基座和筋腱。SeaStar TLP從頂部向下看因形似海星而命名,由單根垂直的立柱和三個矩形截面的浮箱組成。
四種典型結構型式的TLP具有不同的動力響應。很多學者基于不同的相似準則研究了結構型式對平臺運動響應的影響。S.Chandrasekaran[2- 3]采用相同的排水量原則,對一座三立柱TLP和四立柱TLP的運動響應進行比較分析。Sun LP[4]基于相同排水量的原則,對比了SPAR平臺、張力腿平臺和半潛式平臺的運動響應。李牧[5]比較三種典型結構型式的半潛式平臺,保證其具有相同的上部結構,并且平臺的立柱和浮箱排水量相同。歐進萍[6- 7]比較了四種型式的TLP,相似準則為平臺具有相同的吃水和上部甲板模塊。
因四種張力腿平臺的結構型式不同,其所受到的水動力作用也不相同。除了使四種平臺具有相同的排水量和甲板重量外,還需要考慮多種因素,如:荔灣氣田井口因分散而需要SCR立管輸送,則MOSES平臺應選用第二代MOSES平臺(深吃水);SeaStar平臺的筋腱數目少于其他三種平臺,所以需設定四種平臺的總筋腱剛度相似等條件。根據荔灣氣田的環境條件和相似條件,本文設計了四種不同結構型式的TLP,完成四種不同結構型式TLP的選型并對其進行總體性能分析。為了評估運動性能是否滿足設計要求,在風、浪、流的聯合作用下,采用動態時域耦合分析的方法對TLP系統進行了分析計算。對平臺運動的研究考慮了頂部張緊式立管(TTRs),鋼懸鏈式立管(SCRs)以及筋腱與平臺主體間的耦合效應。通過對比其筋腱受力以得到最優系泊動力特性平臺;通過對比氣隙分析、筋腱數目以得到最優經濟性平臺;通過動暈環境條件分析得到最適宜人員操作平臺;上述數據為張力腿平臺在南海海域的結構選型,特別在水動力性能方面提供必要的參考依據。
1 數值模擬
1.1TLP系統動態時域耦合分析方法
TLP系統在環境載荷作用下的總體動力響應受多種非線性因素影響,這些因素包括非線性水動力載荷(非線性曳力、自由表面影響和二階波浪載荷)、非線性系泊和立管恢復力、大幅度的縱/橫蕩運動、大幅度的首搖運動和波浪漂浮阻尼等。因此要獲得系統準確的總體響應必須采用動態時域耦合分析方法來考慮各種非線性因素的影響。
基于三維輻/繞射理論,通過頻域計算得到TLP的水動力系數以及一階、二階波浪力;將頻域分析得到的波浪激振力和輻射水動力系數應用于時域模擬分析中,進而得到TLP在時域中的波浪激振力、ω趨于無窮大時的附加質量μ(∞)和時延函數K(t)。平臺慢漂阻尼采用Newman近似,平臺的時域運動方程如下:
[M+μ()](t)+(τ)K(t-τ)dτ+Bη(t)=Fwave(t)(1)
時域分析中平臺的輻射力用時延函數的卷積積分來表示,對于隨機激勵(如隨機海浪)的響應,在求解運動方程時不用對高低頻單獨考慮,完全可以計入高低頻之間的相互影響,是一種更加恰當的處理方式。在零航速下,阻尼系數和時延函數有如下性質:
1)ω=0或ω→∞,B(ω)=0
2)t→∞,K(t)=0
3)μ(∞)是ω→∞時的附加質量,μ=A(∞),不隨頻率而變化。
在計算K(t)和μ(∞)時,附加質量A(ω)和阻尼系數B(ω)可用比較成熟的水動力計算軟件獲得,而計算K(t)和μ(∞)時需要計算整個頻率域內B(ω),因此如何做阻尼系數的截斷處理是關鍵,否則數值誤差勢必影響后續時域波浪力和波浪載荷預報[8]。本文中采用計算高頻振蕩Flion積分來逼近B(ω),從而得到平臺的波浪輻射力。
1.2荔灣氣田環境條件
荔灣氣田坐落在中國近海較偏遠位置,其水深達到1 500 m,位于香港/維多利亞以南約300 km處。荔灣3- 1包含珠江口流域合同區域29/26附近的開采區。本文分別選取作業工況、極限工況和生存工況作為計算平臺運動響應的三種環境條件,風、浪、流的具體參數如表1所示。其中,環境力方向為風、浪、流同向,假設流為定常剪切流,并且在給定值之間進行線性變換。風載荷采用NPD風譜模擬,作用于水平面以上10 m處。
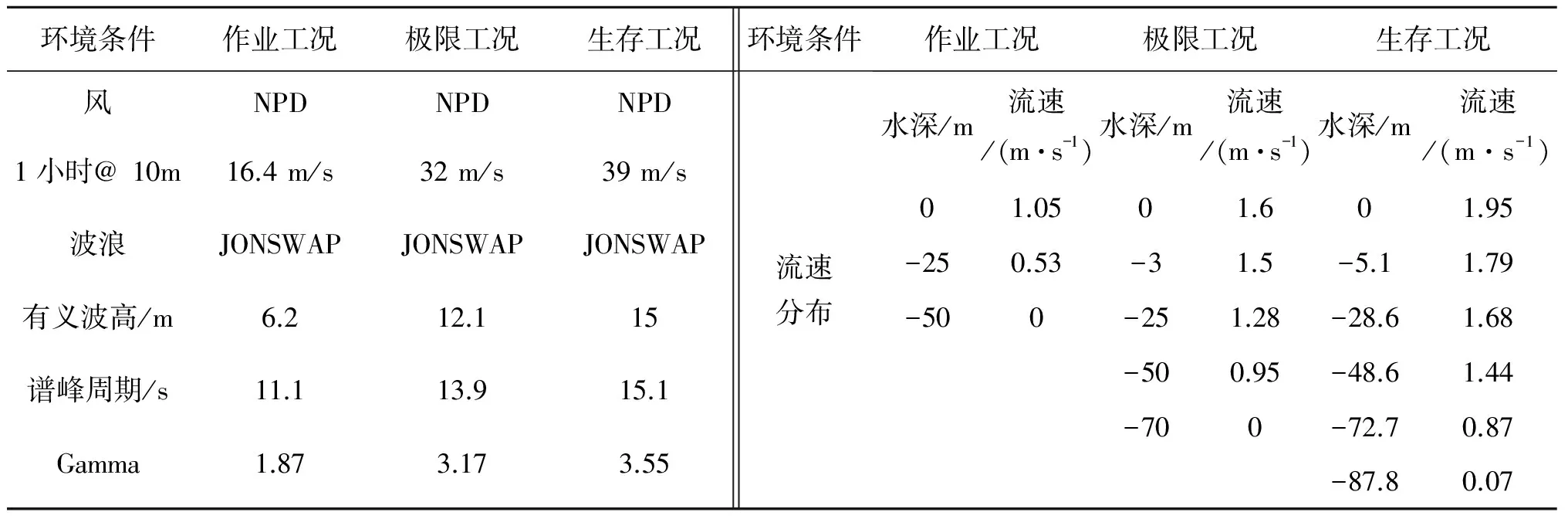
表1 荔灣3- 1環境條件Tab. 1 Environment condition of Liwan 3- 1 area
1.3不同結構型式的TLP相似條件
不同結構型式的TLP平臺差別很大,本文所選擇的相似條件一部分基于其他學者[2- 6]的研究經驗:1)相同的上層甲板質量和設計排水量;2)四種平臺的浮筒和立柱保持相同的排水量。在此基礎上,與實際相結合適當加入一些其他的相似條件:3)由于不同的平臺結構型式相差較大,設計過程中盡量保證CTLP和ETLP底面積相似,而MOSES和SeaStar的底面積相近,以確保不同平臺的垂向附加質量和阻尼具有一定的相似性;4)荔灣氣田開采過程中的井口布置,須采用鋼懸鏈式立管(SCRs)進行輸送,建議采用第二代MOSES TLP(有深吃水的特性),因此依據Marco Polo TLP的設計參數,二代MOSES TLP的吃水為37m;5)為了使平臺的動力響應具有可比性,應保證四種平臺的縱蕩、橫蕩和垂蕩響應幅值相近;6)使四種平臺張力腿的總拉伸剛度相同以確保平臺在水平方向上的運動相似。SeaStar平臺的筋腱采用3×3方式布置,由于其筋腱的數目少于其他三種平臺,因此SeaStar筋腱的直徑和厚度要大于另外三種型式的張力腿平臺。
時域耦合動態擬合分析中筋腱對平臺視為剛性作用。筋腱剛度方程如下:
式中:EA表示筋腱總剛度,L表示筋腱長度。
根據同樣的相似條件確定四種平臺的主尺度,具體參數如表2所示;由以上相似條件得到四種平臺的主尺度,具體參數見表3;表4為四種平臺的固有周期;對四種典型的張力腿平臺進行面元劃分并按照不同的結構型式加裝TTR和SCR立管,如圖1~圖4所示。
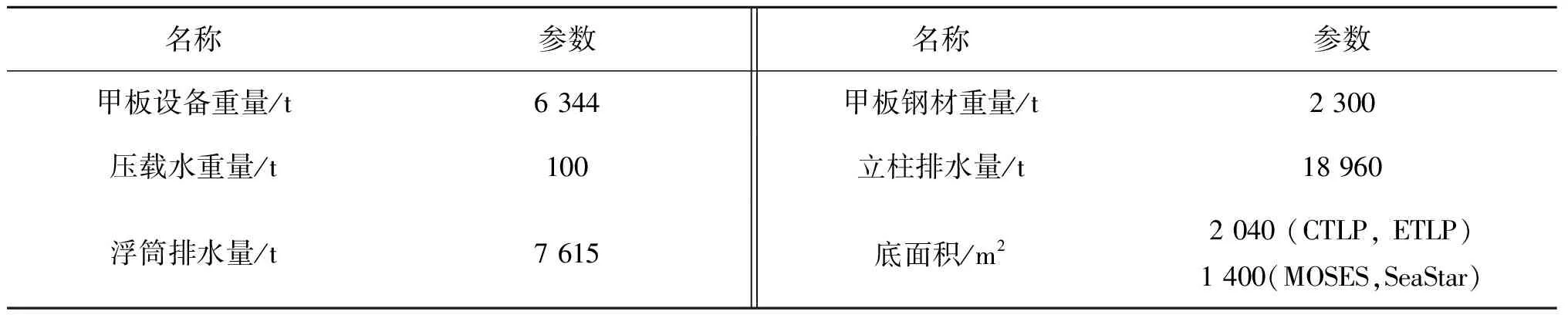
表2 四種平臺主尺度Tab. 2 Principal dimensions of four platforms
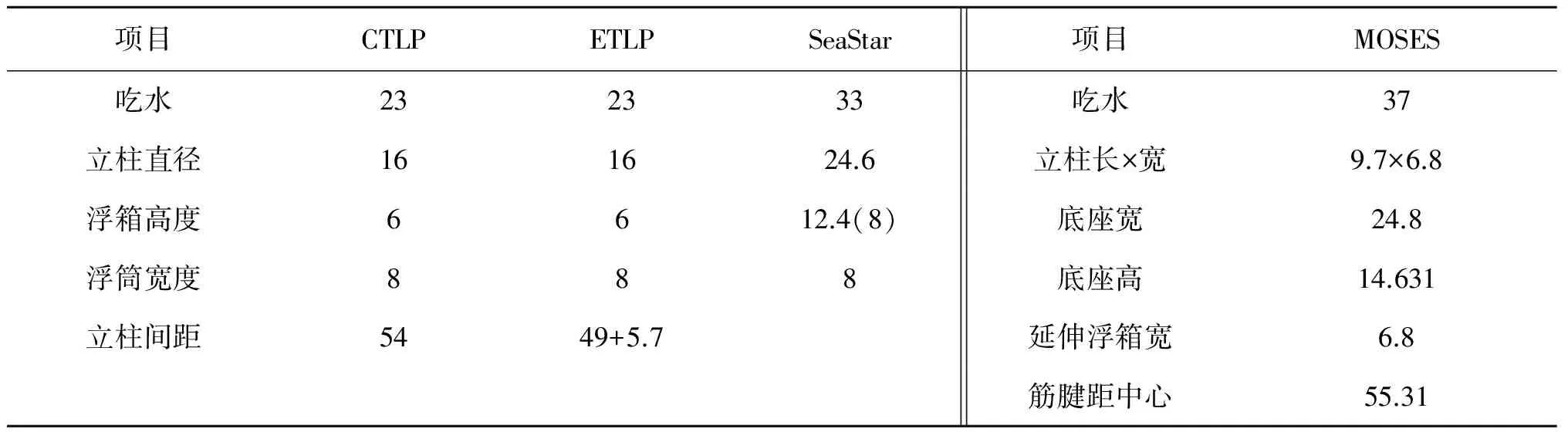
表3 四種平臺詳細參數 m

表4 結構固有周期 s

圖1 傳統型張力腿平臺Fig. 1 Model of CTLP
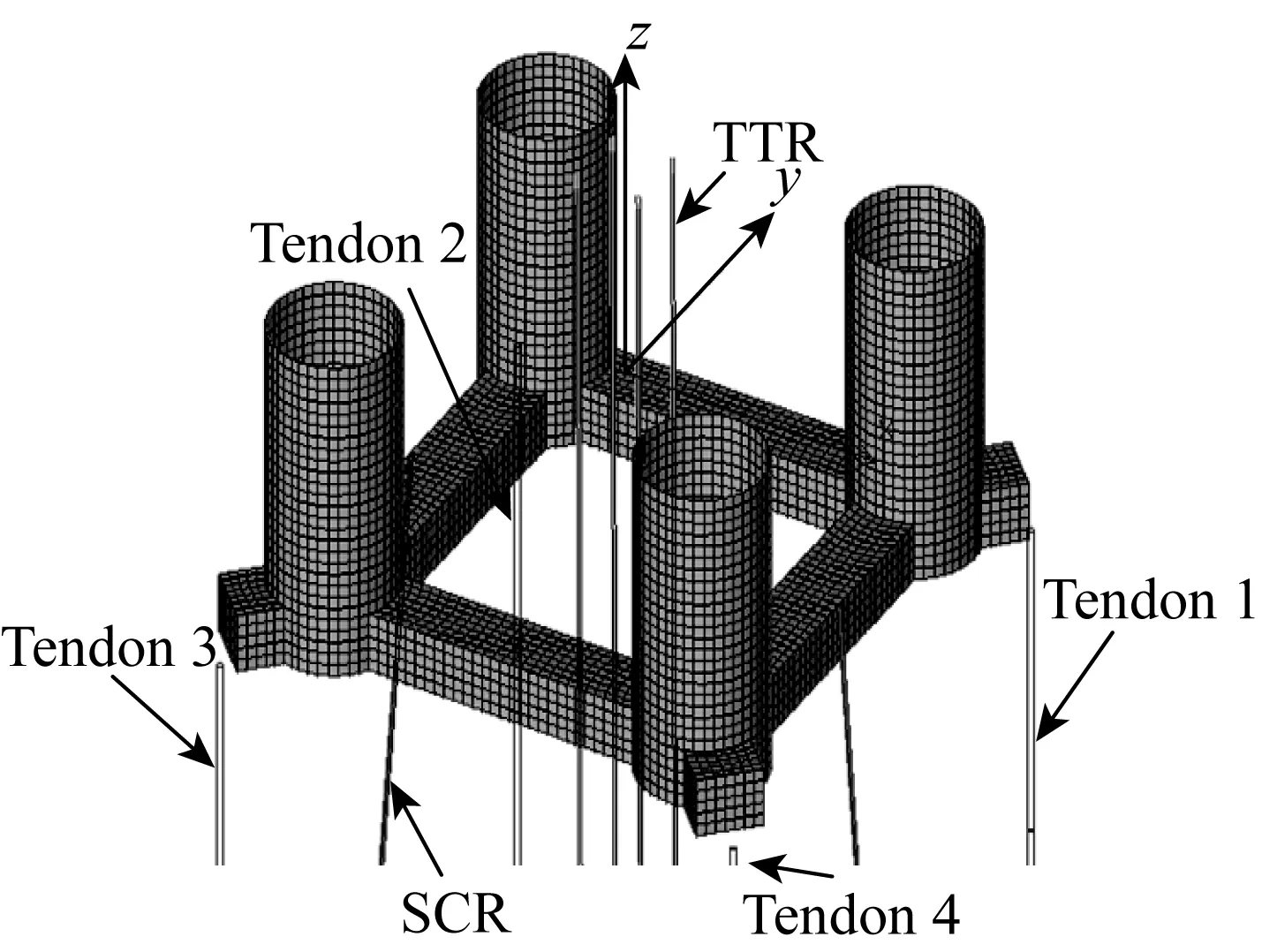
圖2 延展式張力腿平臺Fig. 2 Model of ETLP

圖3 MOSES張力腿平臺Fig. 3 Model of MOSES
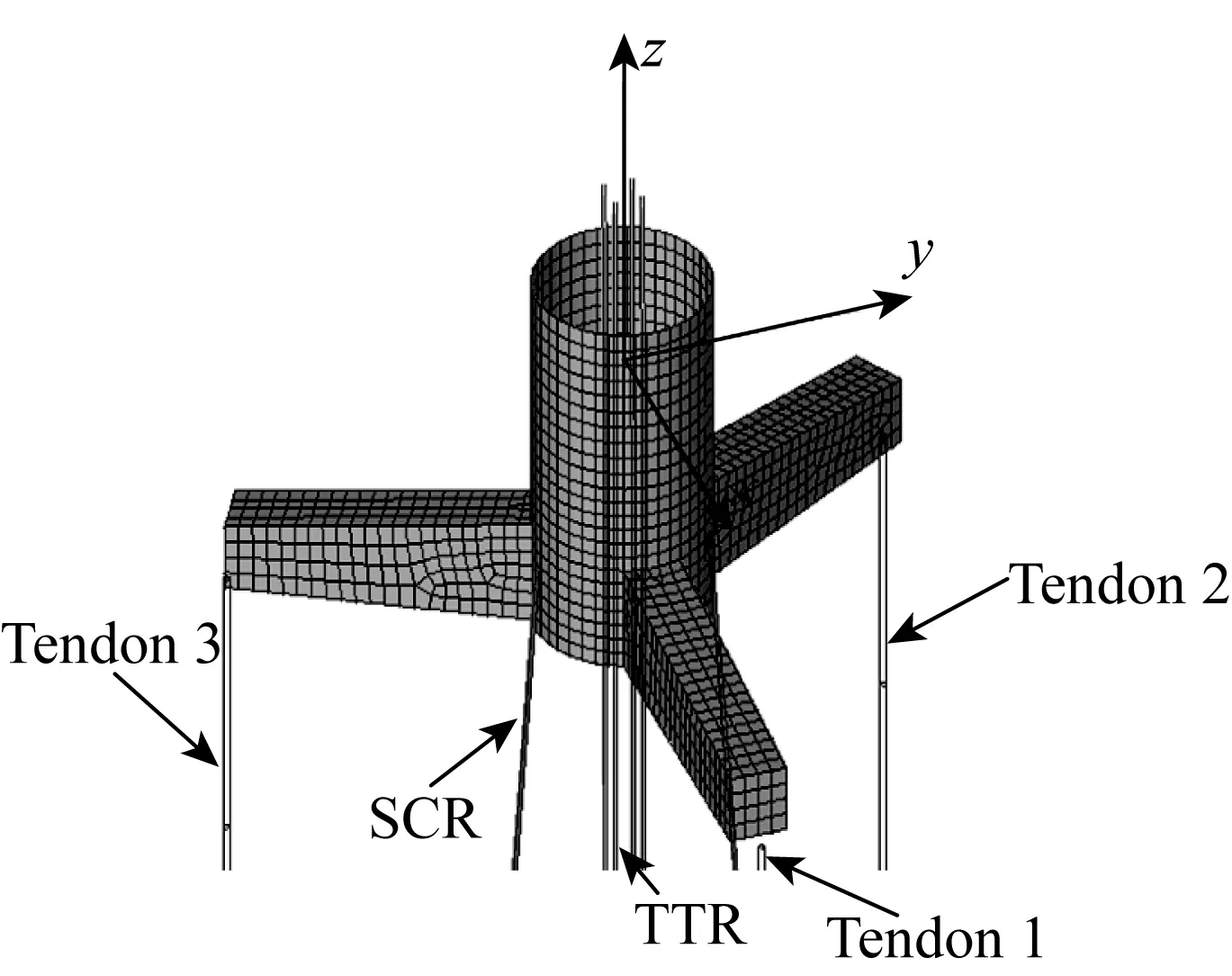
圖4 SeaStar張力腿平臺Fig. 4 Model of SeaStar
2 結果與討論
2.1動力響應分析
根據頻域計算所得的水動力系數和波浪力,應用傅里葉變換和卷積積分理論可以得到輻射力、衍射力、以及F-K力的記憶函數。在時域分析中通過求解運動方程得到平臺的運動響應。運動響應的極值是評價平臺能否適用于該水域開采的重要指標。
通過時域耦合動態模擬分析,得到了四種平臺在作業工況、極限工況以及生存工況下的縱蕩和橫蕩運動響應最大值,如圖5所示。考慮到南海的海況特征,風和流對于平臺的影響不可忽略。通常在初步設計階段,張力腿平臺的運動幅值最好不超過其在位水深的5%[9],根據計算結果可知,通過相似準則得到的張力腿平臺滿足設計在位要求。特別指出的是,SeaStar平臺在作業工況下的運動響應較優,而在極限工況下的運動響應增加顯著。
圖6中的四條曲線分別表示四種張力腿平臺在作業工況下沿X方向的運動幅值,相應的平均運動幅值分別為19.84,20.60,20.9和20.89 m。RMS分別為2.90,3.025,1.377和1.636。通過對比,可以看出四種平臺在作業工況下的平均幅值相近。從RMS值來看CTLP和ETLP的振蕩幅值大于其他兩個平臺,同時MOSES和SeaStar平臺的最大運動幅值比CTLP和ETLP小得多。
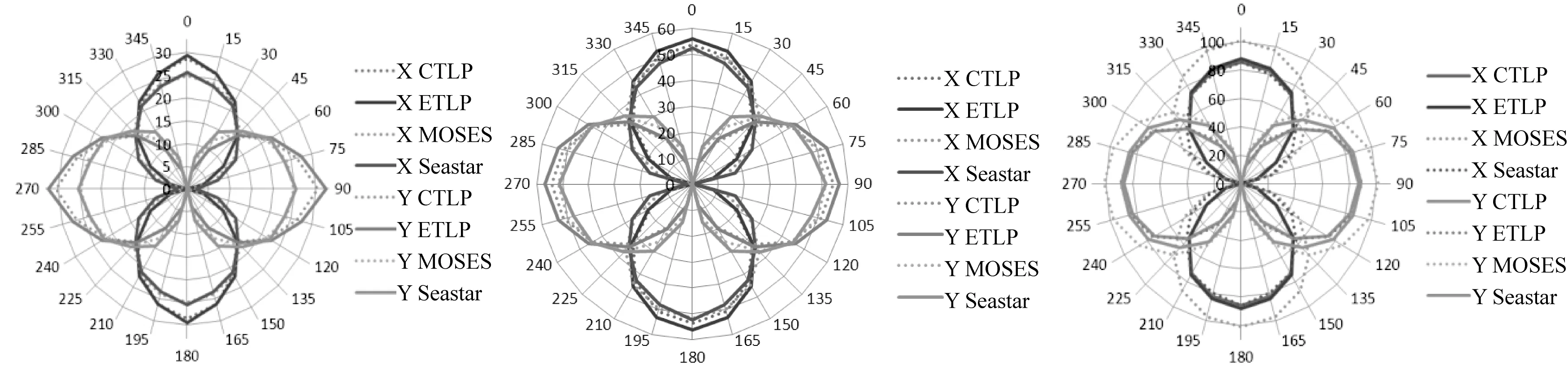
圖5 作業工況、極限工況、生存工況下的最大縱蕩橫蕩位置Fig. 5 Max surge/sway positions under operation condition, extreme operating condition and extreme design condition

圖6 平臺在X方向的運動響應Fig. 6 Motion of the platforms in X direction
2.2筋腱分析
對TLP進行評估的另一個重要標準是筋腱張力是否能夠滿足要求[10]。筋腱使用X65鋼材,屈服強度為448 MPa,極限應力為530 MPa。根據API RP 2T規范,安全系數可以根據利用率來判斷。該利用率可以通過公式(3)計算得到。
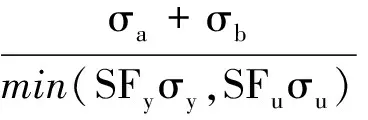
式中:UR=利用率,σa=軸向應力,σb=總體彎曲應力,σy=屈服應力,σu=極限應力。

表5 安全準則Tab. 5 Safety category
表6~表8為最大受力筋腱分別在0°至90°環境力入射角度下不同工況的利用率系數值。
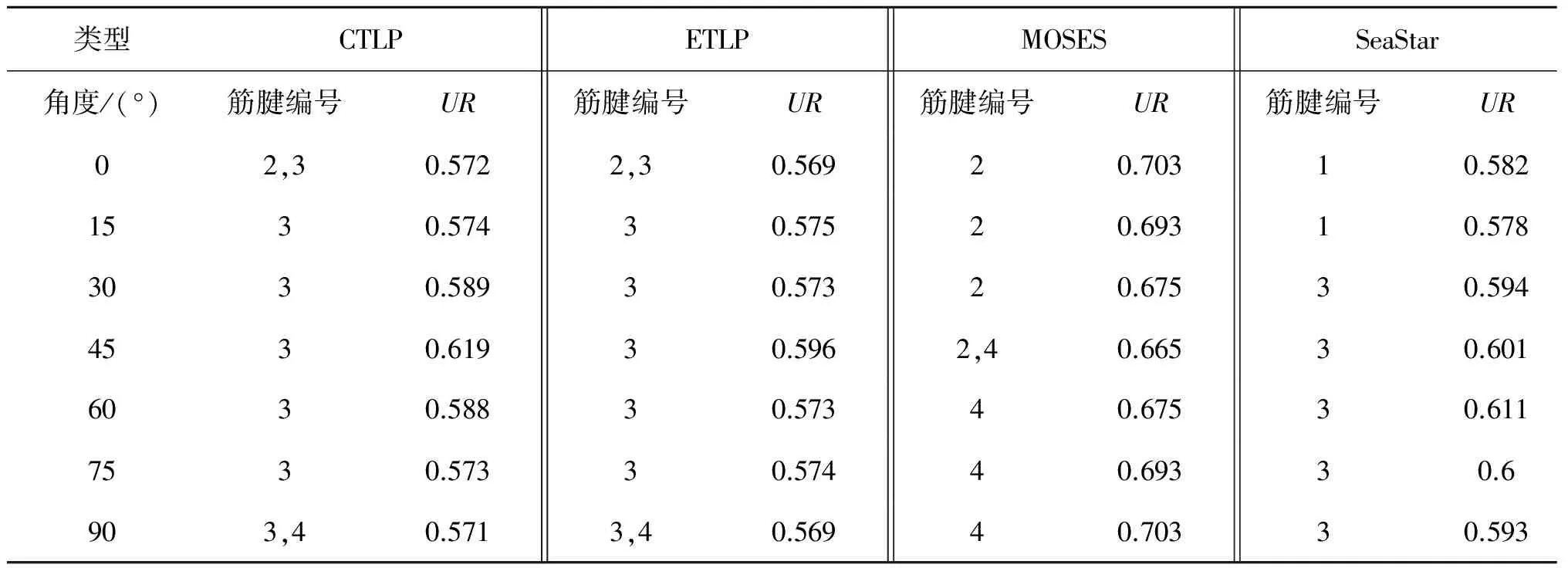
表6 作業工況下筋腱UR值Tab. 6 UR of the tendons under operation condition

表7 極限工況下筋腱UR值Tab. 7 UR of the tendons under extreme operating condition
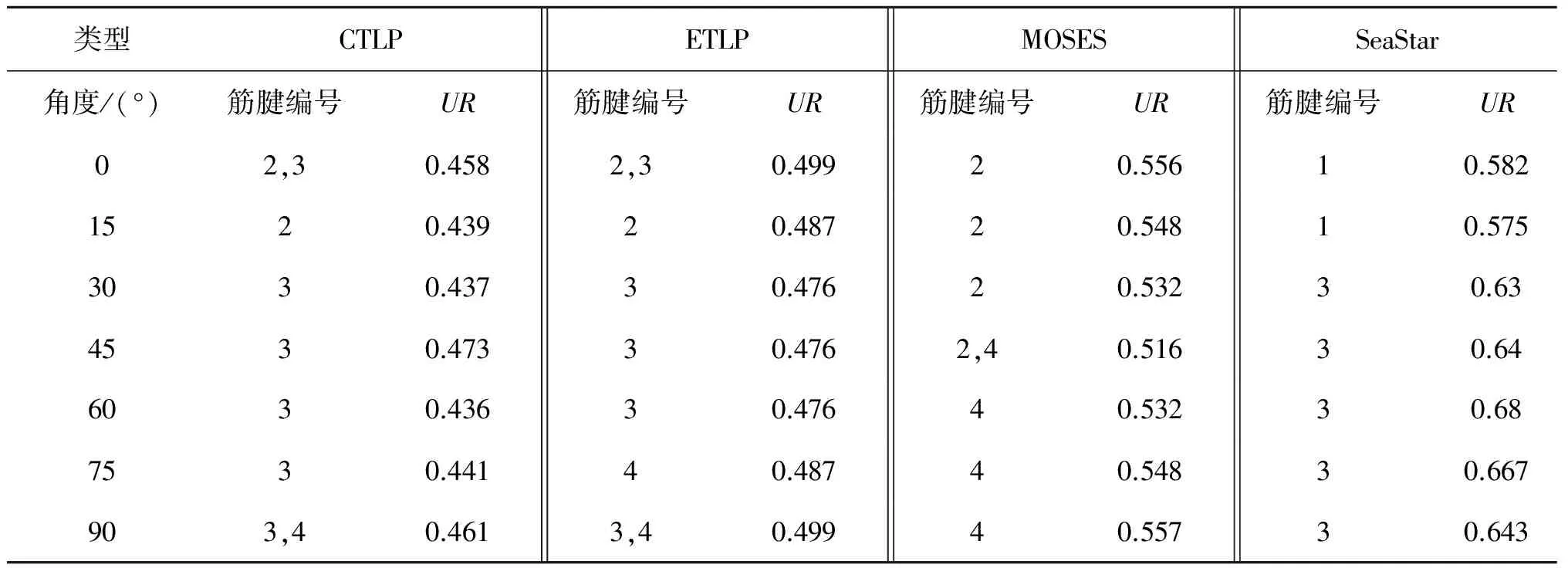
表8 生存工況下筋腱UR值Tab. 8 UR of the tendons under extreme design condition
Moses和SeaStar浮體建造鋼材用量較少,所以這兩種平臺的總預張力要大于另外兩種平臺。表6~表8表明在作業工況和極限工況條件下SeaStar的筋腱受力最小,MOSES的筋腱張力為最大。但在生存工況下,SeaStar的筋腱張力迅速增大而MOSES的增長緩慢。由此證明SeaStar的筋腱在惡劣海況下較為脆弱。從表6~表8中得知最大受力筋腱通常為迎浪的那根。

圖7 生存工況下筋腱等效應力Fig. 7 Von mises stress of the tendons under extreme operating Condition
圖7可以看到在生存工況下筋腱的等效應力。CTLP和ETLP的最大張力出現在入射波方向為45°時的3號筋腱上;同時SeaStar的3號筋腱在入射波方向為60°時受力最大。筋腱的平均等效應力分別為1.247E7、1.252E7、1.400E7和1.697E7 N/m,由此看出CTLP和ETLP的筋腱應力小于其他兩種平臺。但是SeaStar采用了3×3的系泊方式,另外三種采用4×3的方式,從經濟性來考慮,SeaStar平臺使用了9根筋腱,比其他三種平臺少3根筋腱,筋腱的數目對平臺各自由度運動無顯著影響[11],所以在經濟性比較占優勢。
2.3氣隙分析
張力腿平臺除了校核其運動以及筋腱所受張力的最大最小載荷外,平臺的氣隙校核也是十分重要的指標之一,即校核在極限環境下平臺在最大波浪作用時的空隙(即平臺上部結構底部與波峰之間的距離,正常要保證上部結構不進水)。目前工程界較為常用的方法是在平臺甲板底部定義多個節點來考慮平臺受力。考慮到波浪爬升的原因,通常定義節點圍繞于各個立柱的四周。

表9 極限工況下各個平臺的氣隙校核Tab. 9 Air gap of different types of TLP
平臺的氣隙校核具體結果如表9所示,證明四個平臺皆滿足要求,即氣隙最小值大于零。通過對平臺的氣隙分析發現,氣隙最小的平臺為CTLP平臺,最小的氣隙值達到了2.813 m,而最大的氣隙平臺為SeaStar平臺,最大氣隙為3.211 m,由于沒能考慮到波浪的非線性原因,實際氣隙會小于計算值,但還有繼續優化的可能。
2.4動暈環境分析
平臺甲板通常是平臺人員工作和生活的主要場所,甲板上的加速度大小影響操作人員的工作效率與操作質量,為了盡可能的減少對人產生的不舒適感覺,平臺甲板的加速度分析是十分必要的。本節對平臺甲板處的生活區和工作區取多個關鍵點,對這些關鍵點進行了加速度分析,以考校四種張力腿平臺在不同環境下人員的舒適度。評校標準根據國際規范NORDFORSK規范[12],如表10所示。

表10 動暈環境條件Tab. 10 Criteria for susceptibility to seasickness
通過對表11進行數據分析,四種平臺的運動狀況良好,可以在較大的風浪流環境下保證人員的駐留并進行簡單的操作作業。對比四種不同結構類型的張力腿平臺,其中MOSES和SeaStar平臺的水平和垂向加速度RMS值較小,相對的CTLP和ETLP的水平和垂向加速度RMS值較大。其中,平臺甲板最大的水平加速度RMS值為0.762 m2/s,最大垂向加速度RMS值為0.372 m2/s,均較小且滿足規范要求。研究發現張力腿平臺的水平運動動暈條件較差,這是由其系泊特性導致的。
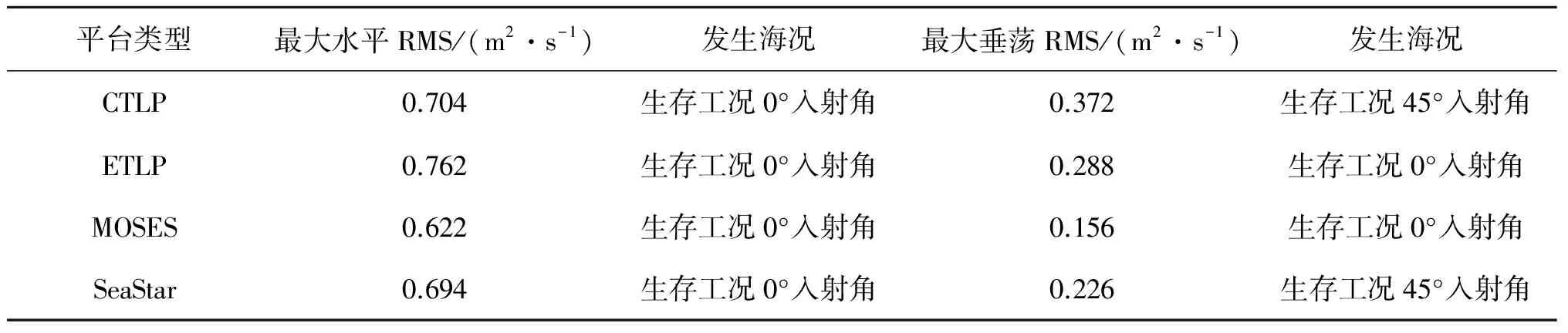
表11 平臺的動暈環境條件Tab. 11 Susceptibility to seasickness of TLP
3 結 語
本文根據新的相似條件對四種不同結構型式的張力腿平臺的水動力響應進行了對比分析,使用時域動態非線性耦合方法在四個方面對張力腿平臺進行了對比分析,分別是:運動響應、筋腱受力、平臺氣隙分析和動暈環境條件。可以得到以下結論:
從運動響應性能方面的對比分析發現,相比其他三種平臺,較小的受風面積和水線面面積使SeaStar平臺在工作海況下具有良好的動力響應,但在極限工況下運動響應增加明顯;從筋腱動力性能分析發現:ETLP筋腱張力最小,SeaStar與CTLP次之,MOSES張力最大,且在極限工況下,SeaStar筋腱受力增加明顯,但相比其他三種平臺,SeaStar浮體建造用鋼量少、而且筋腱數目少,SeaStar平臺在經濟性上略有優勢;由氣隙分析和動暈環境條件分析得到,SeaStar和MOSES優于CTLP與ETLP,能夠有效避免波浪抨擊,同時更大程度上保證人員舒適性和平臺的可操作性。結合以上分析,TLP平臺在荔灣氣田的最終選型受建造、安裝、拖航、在位等工況制約,同時也受項目建造和安裝的經濟性制約,以及結構的總體可靠性制約,所以TLP平臺結構最終方案選型的確定需綜合考慮。
[1] BIN X, AIXIA Z. Engineering mode and platform selection for deepwater oilfield development in South China Sea[J]. ACTA Petrol Science, 2007, 28 (1): 115- 118.
[2] CHANDRASEKARAN S, JAIN A K. Dynamic behavior of square and triangular offshore tension leg platforms under regular wave loads [J]. Ocean Engineering, 2002, 29: 279- 313.
[3] CHANDRASEKARAN S, JAIN A K, GUPTA A. Influence of wave approach angle on TLP’s response [J]. Ocean Engng., 2007, 34: 1322- 1327.
[4] DONG Y Q, SUN L P. Comparison study of different floater effect on deepwater SCR[C]//OMAE International Conference on Ocean, Offshore and Arctic Engineering. Portugal, 2008: OMAE 2008- 57964.
[5] 李牧. 南海張力腿平臺優化選型研究[D].天津:天津大學,2010. (LI Mu. Optimum selection of tension leg platform based on South China Sea [D]. Tianjin: Tianjin University, 2010. (in Chinese))
[6] YAN Gongwei, OU Jinping, Dynamic response analysis on different types of TLPs[C]//OMAE International Conference on Ocean, Offshore and Arctic Engineering. Shanghai, 2010.
[7] LI Binbin, LIU Kun, OU Jinping. Hydrodynamic comparison of a semi- submersible, TLP, and Spar: numerical study in the South China Sea [J]. Environment Journal of Marine Science and Application, 2011, 10:306- 314.
[8] TRISTAN P′EREZ, THORL FOSSEN, Time- vs. frequency- domain identification of parametric radiation force models for marine structures at zero speed[J]. Modeling, Identification and Control, 2008, 29(1):1- 19.
[9] SURBRAKA K, CHAKRABARTI. Handbook of offshore engineering [M]. Elsevier Science Ltd., 2005: 500- 501.
[10] 安光偉, 陳燕, 孫克淋. 基于檢測結果的海洋工程結構TLP系索系統疲勞可靠性分析[J].哈爾濱工程大學學報, 2004(6): 700- 704. (AN Guangwei, CHEN Yan, SUN Kelin. Fatigue reliability of TLP tendon system based on inspection [J]. Journal of Harbin Engineering University, 2004(6): 700- 704. (in Chinese))
[11] 宋林峰,孫麗萍,趙君龍,等.張力腿平臺系泊系統敏感性分析[J].中國造船,2012(4):109- 117. (SONG Linfeng, SUN Liping, ZHAO Junlong, et al. A Sensitive analysis of mooring system of tension leg platform [J]. Journal of Shipbuilding of China, 2012(4):109- 117. (in Chinese))
[12] DNV- OS- E301. Position mooring[S]. Norway: Det Norske Veritas, 2004.
Structure type selection of TLPs based on hydrodynamic performance
QIAN Jiayu, SUN Liping, SONG Linfeng
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
In order to find which of four typical Tension Leg Platforms is more suitable for the Liwan field in the South China Sea, this study chooses one based on the assumption of similarity principle to ensure that the four platforms have the same similarity criteria in the design. These similarity principles are used to ensure that these four platforms have similar hydrodynamic response and mooring property. In the time domain simulation, the interaction between the platform and the mooring system is considered, in terms of TTRs, SCRs and tendons. In order to provide references for engineering application, the dynamic response, tendon tensions, air gap analysis and susceptibility to seasickness are compared.
tension leg platform; optimum selection; hydrodynamic response; air gap analysis; susceptibility to seasickness
P751
A
10.16483/j.issn.1005- 9865.2015.05.013
1005- 9865(2015)05- 097- 08
2014- 06- 04
黑龍江省科學基金會資助項目(QC2014C049); 中央高校基本科研業務費專向資金資助項目(HEUCFD1402,HEUCFD1424); 國家高等學校學科創新引智計劃資助項目(B07019); 高等學校博士學科點專項科研基金新教師類資助課題(20132304120008)
錢佳煜(1988- ),女,江蘇南通人,博士研究生,從事船舶與海洋工程浮式平臺水動力研究。E- mail:qianjiayu1126@126.com
孫麗萍。E- mail:sunliping@hrbeu.edu.cn
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06