再復(fù)卷機(jī)退紙架電機(jī)控制方法研究
2015-10-30 07:20:08孟彥京
制造業(yè)自動(dòng)化 2015年8期
李 茜,趙 丹,孟彥京
(陜西科技大學(xué) 電氣與信息工程學(xué)院,西安 710021)
0 引言
再復(fù)卷機(jī)用于對(duì)已復(fù)卷的50g/m2~120g/m2的不合格成品紙進(jìn)行再次分切復(fù)卷,復(fù)卷成寬度緊度符合要求的成品紙卷,在復(fù)卷過程中還可以除去質(zhì)量不好的紙張,粘結(jié)斷頭。再復(fù)卷機(jī)不同于普通復(fù)卷機(jī)的是它的退紙架上有左右兩臺(tái)電機(jī)共同驅(qū)動(dòng)退卷紙芯,對(duì)于再復(fù)卷機(jī)退紙架電機(jī)的控制精度直接影響退卷紙幅的張力控制精度,而退卷張力控制的穩(wěn)定與否又與成品紙卷形態(tài)的優(yōu)劣緊密相關(guān)。因此,必須為再復(fù)卷機(jī)退紙架電機(jī)選擇正確的控制策略,實(shí)現(xiàn)退卷紙幅張力的精確控制。
1 再復(fù)卷機(jī)工作原理
河南濮陽龍豐紙業(yè)有限公司2014年下引紙?jiān)購?fù)卷機(jī)項(xiàng)目中使用的在復(fù)卷機(jī)退紙架如圖1所示。
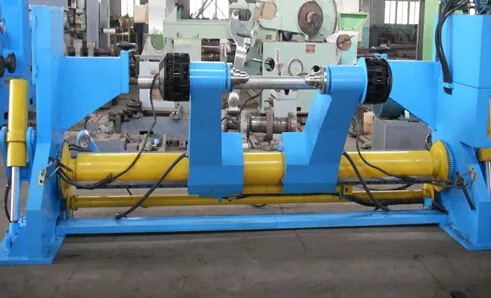
圖1 再復(fù)卷機(jī)退紙架
如圖1所示,再復(fù)卷機(jī)是把把不合格卷筒紙放在液壓無軸退紙架上,退紙架左右兩邊各配有交流變頻電機(jī)、光電編碼器及張力傳感器以保持紙幅有均勻的張力,并在斷紙時(shí)能使紙幅快速制動(dòng)。紙幅由放紙卷引出,通過上遞紙裝置和導(dǎo)紙輥裝置,經(jīng)過弧形輥舒展后,通過縱切系統(tǒng)進(jìn)行縱切,再經(jīng)過弧形輥和遞紙裝置,繞過后支承輥而纏卷在卷紙筒上,卷紙筒依靠兩個(gè)支承輥的驅(qū)動(dòng)而運(yùn)轉(zhuǎn),從而牽動(dòng)整個(gè)紙頁前進(jìn)。
2 再復(fù)卷機(jī)退紙電機(jī)控制要求
再復(fù)卷機(jī)是重新復(fù)卷已經(jīng)復(fù)卷過得紙卷,在復(fù)卷過程中,紙幅也是從退紙卷上引出,繞過導(dǎo)紙輥、舒展輥,通過固定位置的縱切機(jī)構(gòu),從機(jī)臺(tái)下面送人紙幅使其繞過后底輥,然后卷在卷紙軸上,如圖2所示。但由于復(fù)卷機(jī)沒有退紙輥,它是通過退紙架上左右兩端的電機(jī)共同驅(qū)動(dòng)一個(gè)退紙紙芯,而紙芯比較柔,在高速運(yùn)行性,就對(duì)兩端電機(jī)的控制提出了進(jìn)一步的要求。再復(fù)卷機(jī)運(yùn)行時(shí),必須保證兩電機(jī)同步運(yùn)行,因此對(duì)于再復(fù)卷機(jī)退紙電機(jī)的控制要求就是如何保證兩臺(tái)電機(jī)能夠穩(wěn)定同步運(yùn)行。
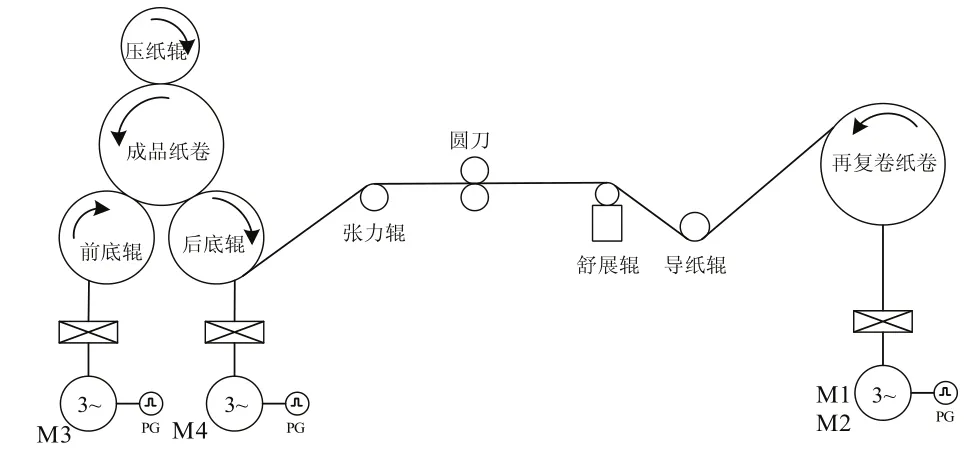
圖2 再復(fù)卷機(jī)結(jié)構(gòu)示意圖
3 再復(fù)卷機(jī)退紙電機(jī)同步控制方式
實(shí)現(xiàn)多電機(jī)同步控制,通常有兩種方式:一是機(jī)械方式,二是電方式。機(jī)械方式采用鏈條、齒輪等剛性連接來實(shí)現(xiàn)多電機(jī)同步控制。電控制由于具有控制精度高,靈活性好的優(yōu)點(diǎn),已經(jīng)廣泛應(yīng)用,電控制一般包括主從控制、并行控制、交叉耦合控制、偏差耦合控制等控制方式。但由于本項(xiàng)目中,只有兩臺(tái)電機(jī)同步控制,而偏差耦合控制是在交叉耦合控制的基礎(chǔ)上研究出的適用于三臺(tái)及以上電機(jī)同步控制的方法,因此在本文中不做說明。
3.1 主-從控制
主/從控制仿真模型如圖3所示。第一臺(tái)電機(jī)作為主電機(jī),控制器將設(shè)定轉(zhuǎn)速送入主電機(jī),主電機(jī)的輸出信號(hào)作為下一臺(tái)電機(jī)的輸入信號(hào)。由此可知這種結(jié)構(gòu)的系統(tǒng)中,第一臺(tái)電機(jī)只能作為主電機(jī),后一臺(tái)電機(jī)只能作為從電機(jī),因而中間的電機(jī)既是主電機(jī)也是從電機(jī),當(dāng)然,在本項(xiàng)目中只有兩臺(tái)電機(jī),一個(gè)主電機(jī),一個(gè)從電機(jī)。
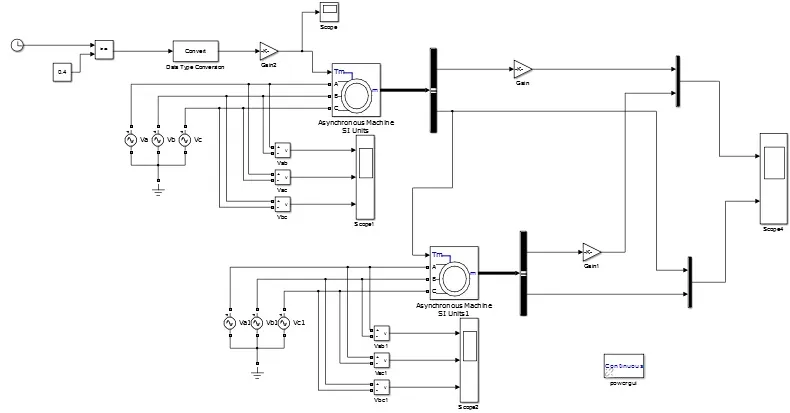
圖3 主從控制仿真模型
在Matlab7.0中對(duì)主/從控制原理圖進(jìn)行負(fù)載突增的仿真實(shí)驗(yàn),兩臺(tái)電機(jī)給定轉(zhuǎn)速設(shè)定為1500rad/min,仿真時(shí)間為2s。得到的仿真結(jié)果如圖4所示。
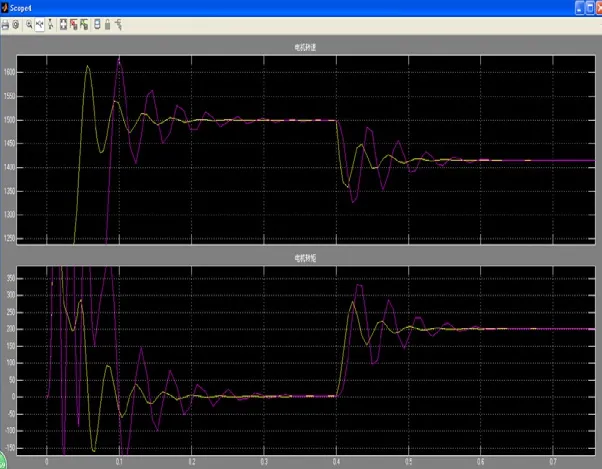
圖4 主從控制轉(zhuǎn)速跟隨曲線
從圖中可以看到,從電機(jī)從0s得電到0.3s兩臺(tái)電機(jī)速度趨于穩(wěn)定同步,設(shè)定在0.4s時(shí)刻給電機(jī)增加負(fù)載,兩臺(tái)電機(jī)的轉(zhuǎn)矩增加并出現(xiàn)波動(dòng),而轉(zhuǎn)速也降低,直至0.6s兩臺(tái)電機(jī)的速度和轉(zhuǎn)矩才趨于同步穩(wěn)定,受負(fù)載擾動(dòng)影響時(shí)間為0.2s。
3.2 并行控制
并行控制結(jié)構(gòu)簡單,易于操作,其仿真模型如圖5所示。并行控制中兩臺(tái)電機(jī)共同擁有一個(gè)輸入信號(hào),兩臺(tái)電機(jī)的控制系統(tǒng)之時(shí)相互獨(dú)立。當(dāng)某一電機(jī)受擾動(dòng)影響時(shí),其自身轉(zhuǎn)轉(zhuǎn)會(huì)發(fā)生改變,由于這兩臺(tái)電機(jī)的系統(tǒng)之時(shí)沒有耦合,故其中任意一臺(tái)電機(jī)運(yùn)行狀態(tài)發(fā)生改變,其他電機(jī)因無反饋信息而保持自身運(yùn)行狀態(tài)不變,可能會(huì)造成比較嚴(yán)重的電機(jī)時(shí)失步。如果兩臺(tái)電機(jī)在運(yùn)行過程中沒有任何擾動(dòng),則整個(gè)系統(tǒng)的同步性能會(huì)比較好,但在實(shí)際應(yīng)用中,這種情況基本是不存在的。
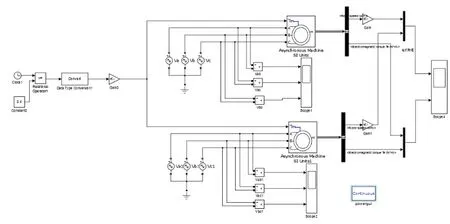
圖5 并行控制仿真模型
在Matlab7.0中對(duì)并行控制原理圖進(jìn)行負(fù)載突增的仿真實(shí)驗(yàn),為了便于觀察兩電機(jī)的速度趨于穩(wěn)定性,我們將電機(jī)1的速度增益設(shè)置的與電機(jī)2的不同,仿真時(shí)間為2s。得到的仿真結(jié)果如圖6所示。

圖6 并行控制轉(zhuǎn)速跟隨曲線
由圖中可以看出,兩電機(jī)在0.2s時(shí)速度、轉(zhuǎn)矩趨于穩(wěn)定,而在0.4s給定負(fù)載后,兩電機(jī)的轉(zhuǎn)速均有波動(dòng),波動(dòng)延續(xù)到0.53s停止,兩電機(jī)的轉(zhuǎn)速趨于同步穩(wěn)定,受負(fù)載擾動(dòng)影響時(shí)間為0.13s。并行控制由于各個(gè)電機(jī)時(shí)沒有反饋信號(hào)互相傳遞,整個(gè)系統(tǒng)處于開環(huán)狀態(tài),當(dāng)受到負(fù)載擾動(dòng)后,兩電機(jī)轉(zhuǎn)速各自發(fā)生波動(dòng),最后達(dá)到穩(wěn)定狀態(tài)。
3.3 交叉耦合控制
交叉耦合控制仿真模型如圖7所示。電機(jī)之間沒有主次之分,同時(shí)電機(jī)之間形成耦合。每臺(tái)電機(jī)加入速度補(bǔ)償器,當(dāng)一臺(tái)電機(jī)速度發(fā)生改變時(shí),另外一臺(tái)電機(jī)能快速的對(duì)電機(jī)的同步誤差進(jìn)行補(bǔ)償,因此具有較強(qiáng)的抗擾動(dòng)能力和較高的控制精度。但是交叉耦合控制結(jié)構(gòu)不適用于三臺(tái)及三臺(tái)以上的電機(jī)。
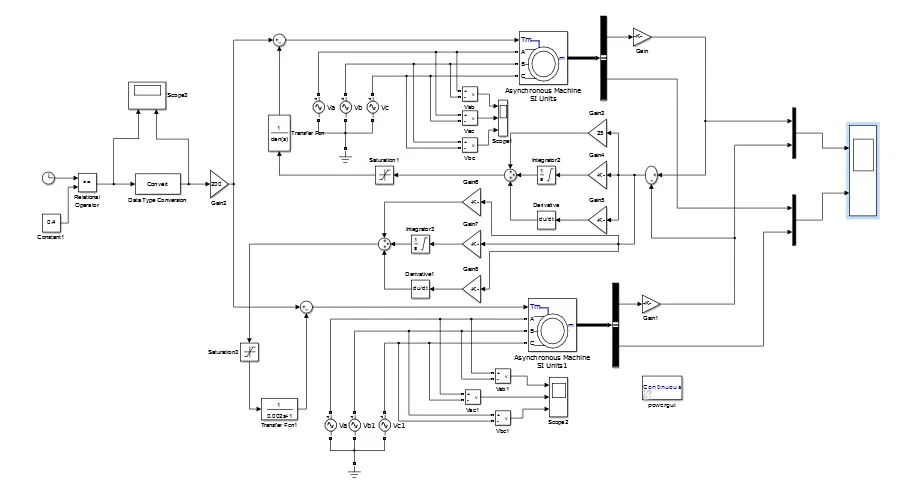
圖7 交叉耦合控制仿真模型
在Matlab7.0中對(duì)并行控制原理圖進(jìn)行負(fù)載突增的仿真實(shí)驗(yàn),為了便于觀察兩電機(jī)的速度趨于穩(wěn)定性,我們將電機(jī)1的速度增益設(shè)置的與電機(jī)2的不同,仿真時(shí)間為2s。得到的仿真結(jié)果如圖8所示。

圖8 交叉耦合控制轉(zhuǎn)速跟隨曲線
由圖中可以看出,兩電機(jī)在0.2s時(shí)速度、轉(zhuǎn)矩趨于穩(wěn)定,而在0.4s給定負(fù)載后,兩電機(jī)的轉(zhuǎn)速均有波動(dòng),波動(dòng)延續(xù)到0.53s停止,兩電機(jī)的轉(zhuǎn)速趨于同步穩(wěn)定,受負(fù)載擾動(dòng)影響時(shí)間為0.13s。
4 結(jié)束語
從以上分析我們可以看出,當(dāng)整個(gè)電機(jī)控制系統(tǒng)空載啟動(dòng)時(shí),并行控制與偏差耦合控制的同步控制性能比主從控制要優(yōu)越。但在發(fā)生負(fù)載擾動(dòng)后,主從控制中從電機(jī)根據(jù)主電機(jī)的轉(zhuǎn)速進(jìn)行調(diào)節(jié)后,轉(zhuǎn)速很快發(fā)生跟隨,達(dá)到了一定的同步控制性能,但如果從電機(jī)發(fā)生負(fù)載突變,主電機(jī)卻無法接收到從電機(jī)的轉(zhuǎn)速反饋信號(hào),則會(huì)產(chǎn)生電機(jī)失步的現(xiàn)象。并行控制由于各個(gè)電機(jī)時(shí)沒有反饋信號(hào)互相傳遞,整個(gè)系統(tǒng)處于開環(huán)狀態(tài),當(dāng)受到負(fù)載擾動(dòng)后,兩電機(jī)轉(zhuǎn)速各自發(fā)生波動(dòng),最后達(dá)到穩(wěn)定狀態(tài)。 交叉耦合控制電機(jī)均有反饋信號(hào)傳遞,整個(gè)系統(tǒng)處于閉環(huán)狀態(tài),任意電機(jī)狀態(tài)的改變都會(huì)影響到其余電機(jī)的狀態(tài),能夠時(shí)刻保持電機(jī)的同步性。因此在河南濮陽龍豐紙業(yè)有限公司2014年下引紙?jiān)購?fù)卷機(jī)項(xiàng)目中,我們結(jié)合以上考慮并聯(lián)系現(xiàn)場實(shí)際成本和實(shí)際運(yùn)行穩(wěn)定性問題,我們退紙輥電機(jī)的控制方式選擇主從控制。
[1] 孟彥京.造紙機(jī)變頻傳動(dòng)原理與設(shè)計(jì)[M].西安:陜西人民出版社,2002.
[2] 楊晨娜.多電機(jī)同步控制方式的研究[J].知識(shí)經(jīng)濟(jì),2011(12):99 100.
[3] 王晶,翁國慶,張有兵.電力系統(tǒng)的MATLAB/SIMULINK仿真與應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2011.
[4] 潘曉晟,郝世勇.MATLAB電機(jī)仿真精華50例[M].北京:電子工業(yè)出版社,2007.
[5] 陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,1999.
