關于智能車電源管理模塊設計
2015-10-29 15:44:45李闖
科學家 2015年9期
李闖

摘 要 本文以全國大學生“飛思卡爾杯”智能汽車競賽為背景。設計、控制平臺主要包括電源管理模塊和電機驅動模塊,并提出一套可行的設計方案。
關鍵詞 智能汽車競賽;電源管理模塊;電機驅動模塊
中圖分類號 TP2 文獻標識碼 A 文章編號 2095-6363(2015)09-0032-02
全國大學生“飛思卡爾”杯智能汽車競賽是以“立足培養、重在參與、鼓勵探索、追求卓越”為宗旨,鼓勵創新的一項科技競賽。以飛思卡爾半導體公司的微處理器為核心,通過自主設計傳感器、電源管理模塊、電機驅動模塊和編寫控制程序,制作一個能按照比賽規則自動識別賽道完成比賽的模型汽車。
硬件是智能車的基礎,其影響著車模系統穩定性。基于此,本文主要提出一套電源管理模塊、電機驅動模塊的可行設計方案。
1 電源管理模塊
根據調整管的工作狀態,直流穩壓電源分為線性穩壓電源和開關穩壓電源。線性穩壓電源通過采樣、反饋等方式來控制調整管的導通程度,其輸出電壓文波比較小、工作噪聲小、反應速度快;調整管工作在放大狀態,效率比較低,發熱量大。在開關穩壓電源中,開關管工作飽和或者截止狀態,對應開、關兩個狀態;效率高,功耗小,存在比較嚴重的開關干擾。
電源管理模塊為車模系統的各個模塊供電,其供電穩定性是車模穩定運行的基礎。在設計中,不僅要考慮各個模塊的正常工作電壓、電流,還要做好各個模塊的隔離,減小模塊之間的噪聲干擾。總的來說,通過三端集成穩壓芯片來給各個模塊來供電。競賽中,常用的電源有串聯型線性穩壓電源(LM2941、TPS系列等)和開關型穩壓電源(LM2596、LM2575、AS1015等)兩大類。
車模電源是7.2V2000mAh的鎳鎘可充電電池,其對車模的各個模塊供電。系統的供電示意圖如圖1所示,7.2V電壓給不同電壓的模塊供電,主要的模塊電壓有12V、5.5V、5V和3.3V。用電池給電機供電,將電源電壓經升、降壓再給其他模塊供電。電機驅動芯片IR2104的供電電壓為12V,S-D5舵機的供電電壓為5.5V,線性CCD的供電電壓為5V,單片機的供電電壓為5V,調參模塊等供電電壓為5V和3.3V。
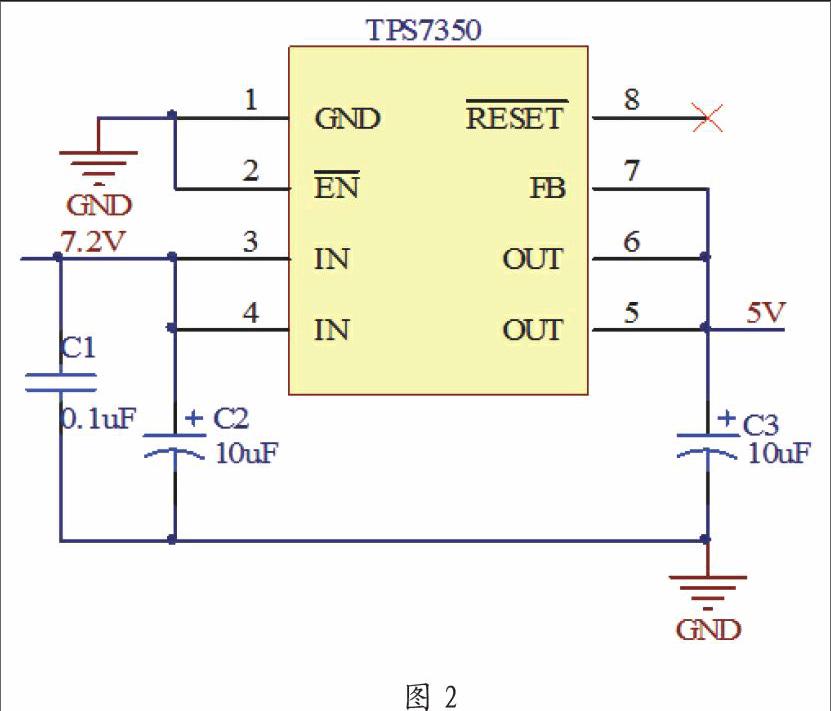
MC9S12XS128單片機是系統的控制中心,其工作的穩定性直接影響車模運行。為了減少其他模塊對其干擾,采用低壓差線性穩壓電源供電。TPS7350具有過流、過壓和電壓反接保護電路,可以有效地保護單片機;最大輸出電流500mA,大于單片機工作電流;穩壓線度相對比較好。所以選用TPS7350對其單獨供電。線性CCD工作條件電源電壓為-0.3V-6V,考慮到單片機的AD采樣轉化精度和線性CCD推薦工作條件等原因,選其最佳工作電壓5V。VDD最大連續電流為40mA,在比賽中一般需要用到2-4個線性CCD,最大電流一般不超過200mA。線性CCD是模擬傳感器,其供電電源的波動將影響其性能, TPS7350穩壓后電壓波動較小,用其對線性CCD單獨供電。
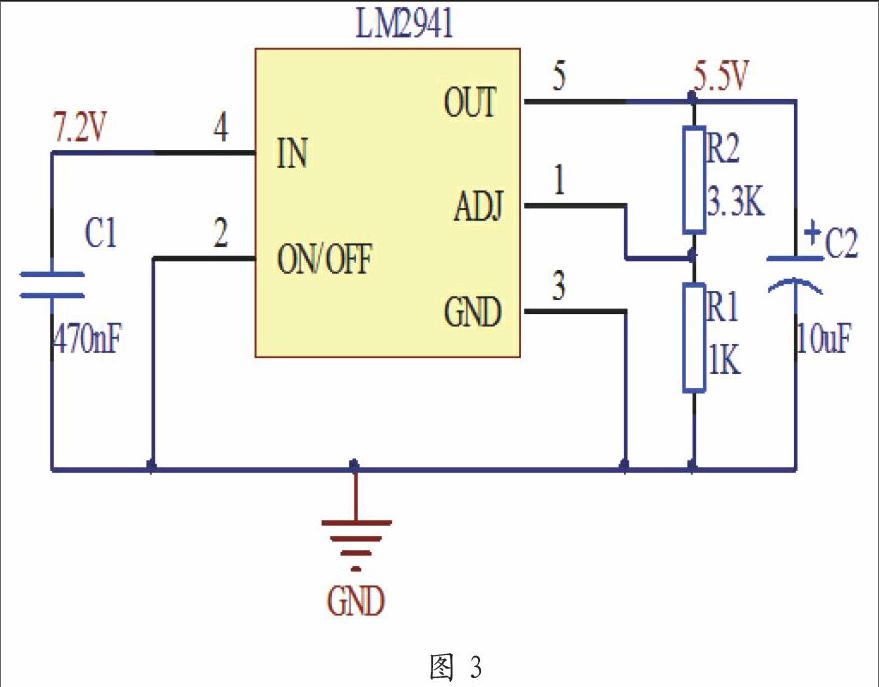
S-D5是數字舵機,工作電壓4.5V-5.5V,正常工作電流200mA,堵轉電流是800mA;工作電壓在5.5V下,帶有堵轉保護功能。舵機在實時控制時存在滯后性,滯后時間的大小主要由舵機的響應時間和轉向傳動比決定。在轉向傳動比不變時,舵機的響應時間與供電電壓有關;舵機的工作電壓越高,響應越快,同時扭矩力越大。選擇5.5V供電,既可提高舵機響應速度,又可以保護舵機。LM2941S是低壓差線性穩壓芯片,原理圖如其輸出電壓,在輸出電流時,。選用為,為,計算得。
常用的調參模塊主要有藍牙、SD卡、OLED顯示屏和按鍵等。不同調參模塊的電壓不同,SD卡供電電壓為3.3V,藍牙、OLED顯示屏可以接3.3V或者5V,按鍵一般接5V。測速模塊一般供電5V。這些模塊電流一般較小,可以根據PCB設計的需要調整各模塊的電壓分配。
2 電機驅動模塊
在競賽中,電機驅動的方式一般有兩種方式:集成芯片、柵極驅動芯片和N溝道MOSFET。常用的集成驅動芯片有BTN7970、BTN7971等;常用的柵極驅動芯片有IR系列的IR2104、IR2184等;常用N溝道MOSFET型號多樣。
集成驅動芯片在過流、短路、過溫和欠壓時,芯片自動關斷輸入。為了防止車模在運行過程中因為芯片保護而停止工作,在設計時要考慮過流保護、散熱等情況并采取措施。而B型車模電機功率比較大,正常工作電流都要大于1A,在啟動或者堵轉的情況下,電流會更大,很容易造成驅動芯片發熱;如若散熱不好,會影響芯片正常工作,進而影響車模運行。所以采用半橋驅動芯片IR2104驅動4個LR7843型N溝道MOSFET H橋的方式來驅動電機。
首先了解一下H橋驅動原理,電機和4個N溝道MOSFET共同構成一個類似于字母H的驅動橋,如圖4所示。當Q1、Q4導通時,直流電機中通過從左到右的電流;當Q2、Q3導通時,直流電機中通過從右到左的電流;流經電機電流方向的改變就可以實現電機的正反轉。但是,在控制4個N溝道MOSFET導通時,同一橋臂的Q1和Q2、Q3和Q4不能同時導通,導通會造成源地的短路;在兩次狀態轉換過程中可能出現瞬時短路,需要在轉換時插入“死區”。在這里,采用一片柵極驅動芯片IR2104來驅動同一橋臂上下兩個NMOS管導通。IR2104內部集成升壓電路,一個自舉二極管和—個自舉電容便可完成自舉升壓。IR2104內部設置死區時間,存在于在每次狀態轉換時,可以保證同一橋臂上、下兩管的狀態相反。
NMOS管是電壓驅動型器件,柵極電壓高于源極電壓即可實現NMOS的飽和導通。電壓通斷MOS管時,要比大10V以上,而且開通時必須工作在飽和導通狀態。IR2104工作電壓為10-20V,采用B0512S隔離電源升壓模塊來供電,IR2104輸出達到15V左右,可以驅動NMOS管。NMOS管柵源極之間是容性結構,柵極回路存在寄生電感,合適的柵極電阻可以迅速衰減柵極回路在驅動芯片驅動脈沖的激勵下要產生很強的振蕩。LR7843型N溝道MOSFET,。電機驅動模塊設計電路圖如圖4。
3 結論
本文的電路方案經過測試,證明了其可行性與可靠性。在車模系統中,各個模塊能穩定可靠地運行。
參考文獻
[1]汪華章,宰文姣,馬亞寧,等.較大功率直流電機驅動電路的設計與實現[J].西南民族大學:自然科學版,2010,36(4).