振動挖掘系統流量控制參數分析
2015-10-29 03:32:19馮繼新
中國機械工程 2015年6期
韓 軍 肖 偉 馮繼新 徐 亮 顧 俊
總裝工程兵科研一所,無錫,214035
振動挖掘系統流量控制參數分析
韓軍肖偉馮繼新徐亮顧俊
總裝工程兵科研一所,無錫,214035
振動挖掘系統流量控制參數決定了振動挖掘力的特性,對振動挖掘作業效能具有重要的影響。建立了振動挖掘多連桿機構的運動學模型,推導了鏟斗油缸伸長量與振動挖掘振幅的靈敏度計算公式,給出了振動挖掘力和鏟斗油缸壓力的求解方法,在流量控制信號輸入模型中,應用傅里葉級數解決了方波、三角波振動控制信號求導問題,用數值分析方法對流量振動控制中的波形、靈敏度系數和油缸壓力分布進行了分析,最后通過試驗對流量振動控制模型進行了驗證。
振動挖掘;運動學;挖掘力;波形;靈敏度
0 引言
振動挖掘是通過液壓驅動挖掘裝置的機構產生高速往復運動,使挖掘鏟斗在常規靜力挖掘力上疊加振動沖擊力,作用于挖掘土壤的一種挖掘方式,這樣可減小挖掘切削阻力,提高作業效率[1-2]。在液壓挖掘機振動挖掘作業控制試驗研究中,流量振動控制是振動挖掘機構動力學研究的一個重要方面。
目前,關于液壓挖掘機工作裝置的振動挖掘的運動學和動力學方面的研究還較少,振動挖掘方面的研究主要集中振動切削機理方面[3-7],文獻[3]研究了鏟斗與巖土相互作用的力學模型,探討了液壓挖掘機振動掘削的減阻規律,從而獲得了振動掘削減小阻力的原因。文獻[4]研究了振動載荷對土壤破碎過程的影響。文獻[5]提出了基于最小二乘支持向量機(LS-SVM)的液壓挖掘機振動掘削過程土壤參數在線辨識算法,進行了土壤固有頻率等參數的在線辨識仿真和試驗研究。Saqib等[6]研究了在甜薯收獲機上利用振動挖掘鏟的作業方法,研究了振動頻率、幅值和前進速度對土塊大小、密度和破碎方面的影響。Niyamapa等[7]研究了振動耕作工具與土壤的破碎機理之間的關系,試驗表明由于振動作用,土壤出現脆性破壞時具有月牙形狀的破壞面,隨著振動速度增加土塊大小尺寸減小。
本文建立了振動挖掘多連桿機構理論模型,給出了流量控制信號模型,對某型液壓挖掘機利用數值計算方法,對其振動控制的波形、靈敏度系數和振動液壓油缸的壓力分布進行分析,最后利用試驗對理論模型進行驗證。
1 振動挖掘機構理論模型
1.1運動學模型
振動挖掘作業是通過驅動三角形機構P5P6P9,再驅動四連桿機構P6P7P9O3,使鏟斗產生振動,進行振動挖掘作業的,如圖1所示。
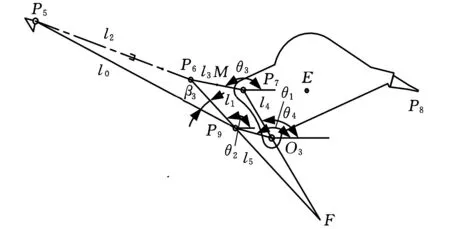
圖1 鏟斗四連桿機構運動模型
首先分析P5P6P9驅動機構關系。設作用于鏟斗液壓油缸P5P6大腔液壓油分靜力分力流量和振動挖掘分力流量分別為qS(t)、qV(t),液壓油作用于鏟斗油缸,在某一時間t,鏟斗油缸的位移P5P6表示為
l2(t)=l20+l2x(t)+Δl2(t)
(1)
式中,l20為油缸未伸縮時的長度,即|P5P6|;l2x(t)為手動控制時油缸的伸長量,l2x(t)=qS(t)/S0,S0為鏟斗油缸的大腔截面積;Δl2(t)為油缸輸入液壓振動信號時的位移量,Δl2(t)=qV(t)/S0,qV(t)可以是三角波、正弦或方波函數。
對式(1)求t的一階和二階導數,有
(2)
(3)
式中的一階、二階導數分別表示液壓油缸手動控制與自動控制振動時的速度、加速度值。
對于圖1中三角形機構,有

(4)
其次,利用矢量法建立雙搖桿四連桿機構P6P7P9O3的運動學方程。有
(5)
對式(5)兩邊分別求t的一階和二階導數,并已知P9O3為連接架,ω1=0,ε1=0,容易得到ω3、ω4、ε3和ε4。
1.2靈敏度分析
為了得到鏟斗油缸的變化量與鏟斗斗齒P8點振幅的變化量關系,現在對其靈敏度進行分析。首先,對于鏟斗的四連桿機構,對于某一姿態,θ1為一個定值,式(5)兩邊對θ2求導,得
(6)
其次,式(4)兩邊對β3求導數,且有dβ3=dθ2,再由dP8=lO3P8dθ4,可得

(7)
式(7)為鏟斗油缸的伸長量對鏟斗的偏轉角度的靈敏度關系式。可知,靈敏度系數只與鏟斗連桿機構的位置參數、幾何參數有關。
1.3求解振動挖掘力和鏟斗油缸壓力模型
為了得到挖掘斗齒點的振動挖掘力,首先利用動能原理求解鏟斗相對于其鉸點的等效轉動慣量。現在通過作圖法,求連桿P6P7的運動瞬心F及其角速度ωF。容易得到:
(8)


(9)
式中,m22為活塞桿的質量。
根據平衡軸定理,對于連桿P6P7,有

(10)
以上,P9F、P7O3、O3F和FM長度的計算均為幾何運算,其計算方法較簡單,這里不再詳述。將式(10)代入式(9)即可得到鏟斗上系統的等效轉動慣量。
利用動量矩平衡原理,有
MC=JVε4
(11)
再根據FD=MC|O3P8|,即可得到作用于斗齒上的挖掘力。
令轉換到鏟斗油缸活塞桿上的等效質量為mV,則有
(12)
對于鏟斗油缸的活塞桿m22部分,利用牛頓定理可得到鏟斗油缸大腔的壓力p,即
(13)
2 流量控制信號輸入模型
設鏟斗振動挖掘時,其振動挖掘流量qV(t)與手動控制流量qS(t)之比為λ,即
(14)
當振動挖掘輸入正弦控制信號時,鏟斗油缸的位移信號為
(15)
式中,qVmax為鏟斗振動時產生的最大流量;f為液壓流量的振動頻率,Hz。
當振動挖掘輸入方波控制信號時,鏟斗油缸的位移信號為
(16)
式中,T為振動周期。
由于方波信號的一階、二階導數非連續,利用傅里葉級數將其展開,得到

(17)
n=1,3,5,…ω0=2π/T=2πf
式(17)兩邊對時間t求一階和二階導數,容易得到輸入信號的速度、加速度信號。同理,可獲得三角波振動控制信號的位移、速度和加速度。
3 數值計算分析
以某型挖掘機為例,已知l0=1511 mm,l1=420 mm,l3=365 mm,l4=345 mm,l5=255 mm,鏟斗質量m1=15 kg,m3=15 kg,m22=55 kg,m4=213 kg。|O3P8|=1040.6 mm,|O3E|=370 mm,鏟斗擺動范圍為[0°,152°]。
(1)輸入不同振動控制波形,分析挖掘力分布情況。分別輸入為正弦、方波和三角波振動控制信號,振動頻率為10 Hz,λ=0.2,可得到鏟斗斗齒點的振動挖掘力分別如圖2、圖3和圖4所示。可以看出,正弦波輸入振動控制信號產生的最大振動挖掘力約為1.9 kN,三角波信號產生的最大振動挖掘力約為26 kN,方波產生的最大振動挖掘力約為58 kN,這是由于方波信號可以產生較大的加速度值,可獲得較大的振動挖掘力,而正弦信號過渡較為平緩,加速度值較小,得到的振動挖掘力值也較小,三角波振動效果位于兩者之間。
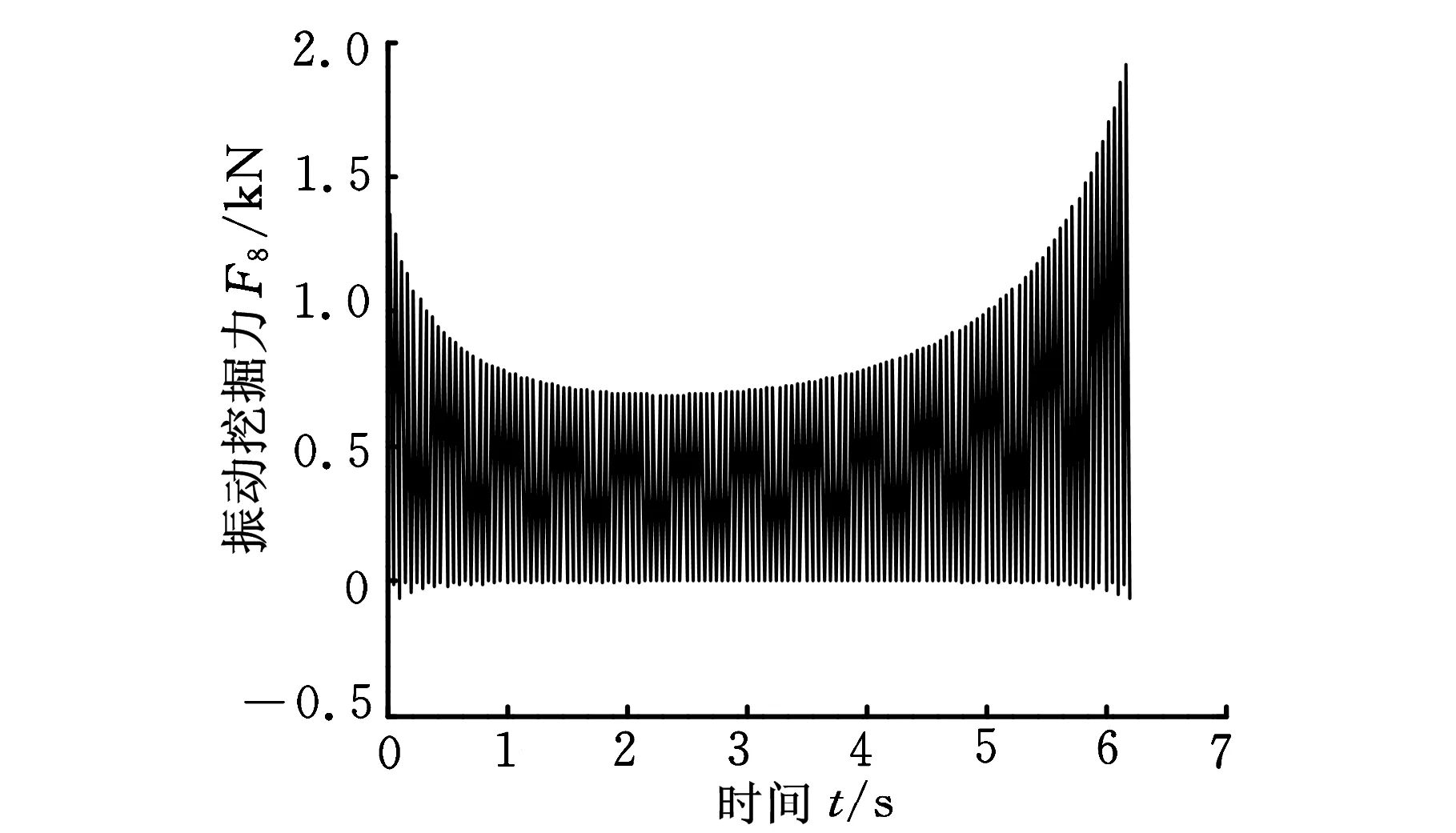
圖2 正弦輸入信號斗齒振動挖掘力
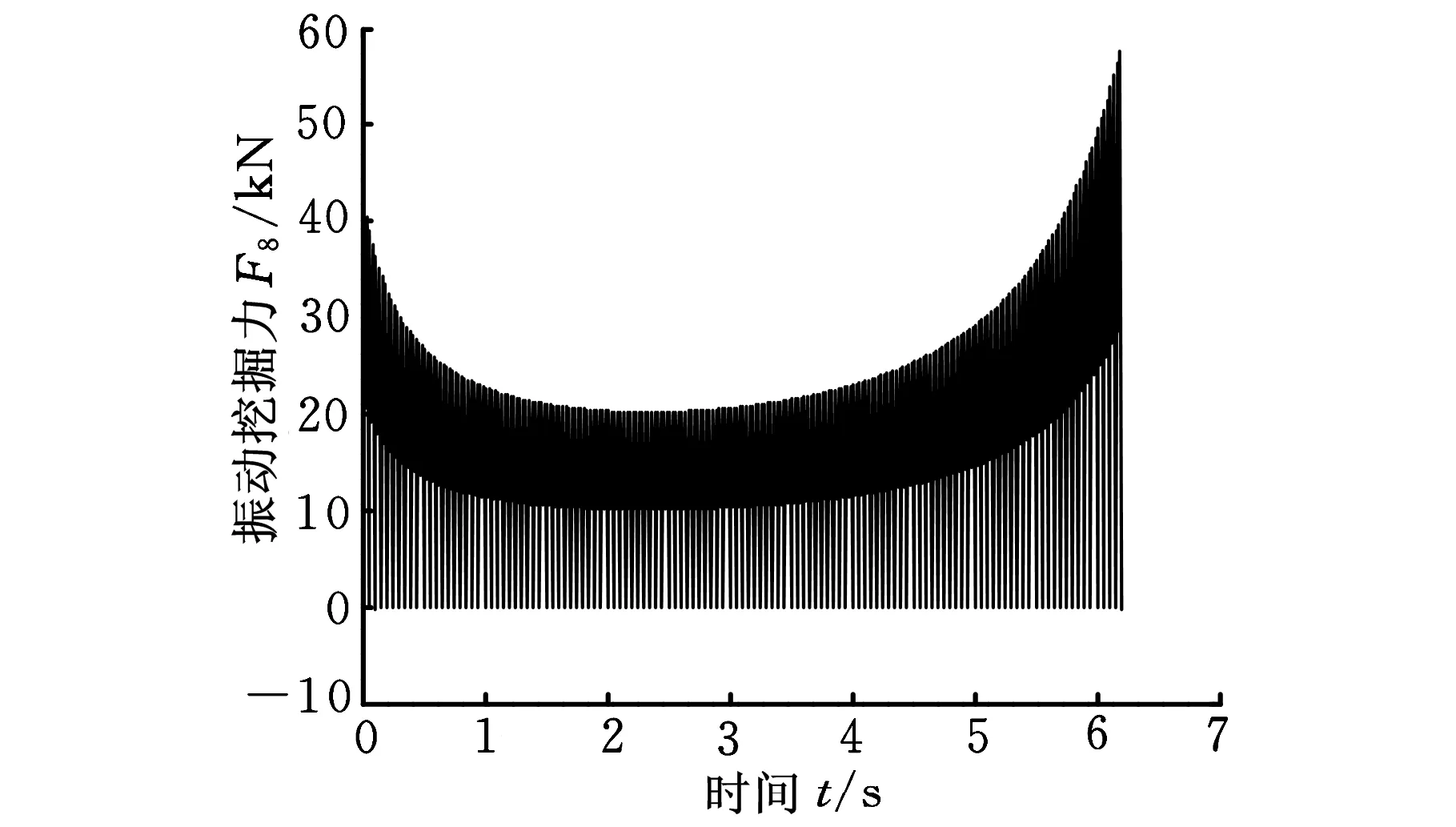
圖3 方波輸入信號斗齒振動挖掘力
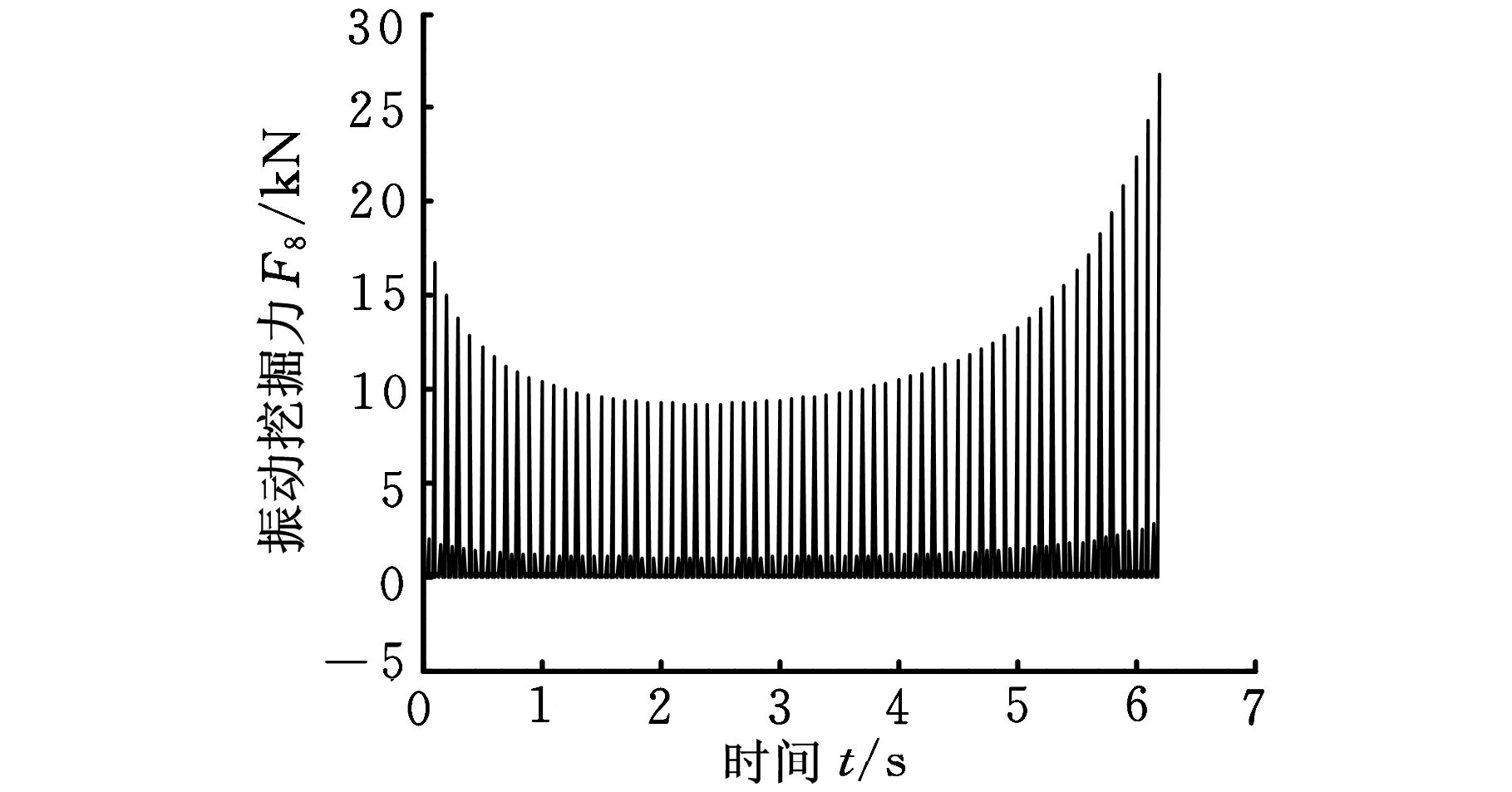
圖4 三角波輸入信號斗齒振動挖掘力
(2)求解鏟斗油缸伸長量對斗齒點P8的振幅靈敏度系數。圖5所示為鏟斗驅動油缸位移關于斗齒點振幅的靈敏度系數,可以看出,鏟斗驅動油缸位移關于斗齒點振動幅值的靈敏度系數隨著鏟斗的旋轉而發生變化,最小值出現在鏟斗油缸的初始位置,為0.16(最為敏感),即鏟斗油缸有1 mm位移,鏟斗斗齒的振幅達到1/0.16=6.25 mm,此時,鏟斗油缸的驅動力臂最短,因此,其靈敏度最高。而當鏟斗油缸驅動到中間位置時,其靈敏度系數反而較大,因為此時鏟斗油缸驅動的四連桿機構的力臂值較小。因此,根據靈敏度系數關系可以確定鏟斗油缸的振動控制的流量,進而確定振動時的幅值。
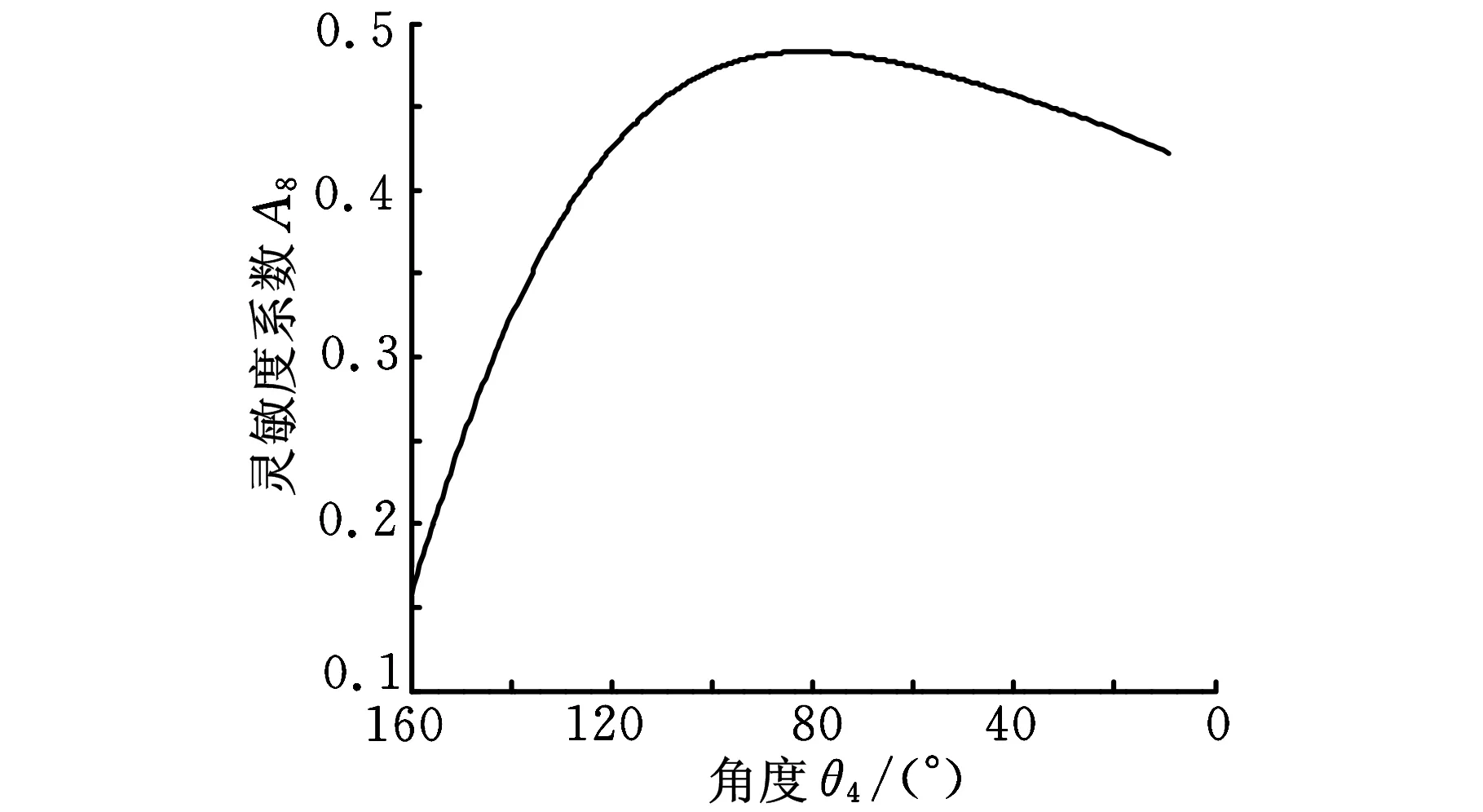
圖5 活塞桿位移關于斗齒點振幅的靈敏度系數
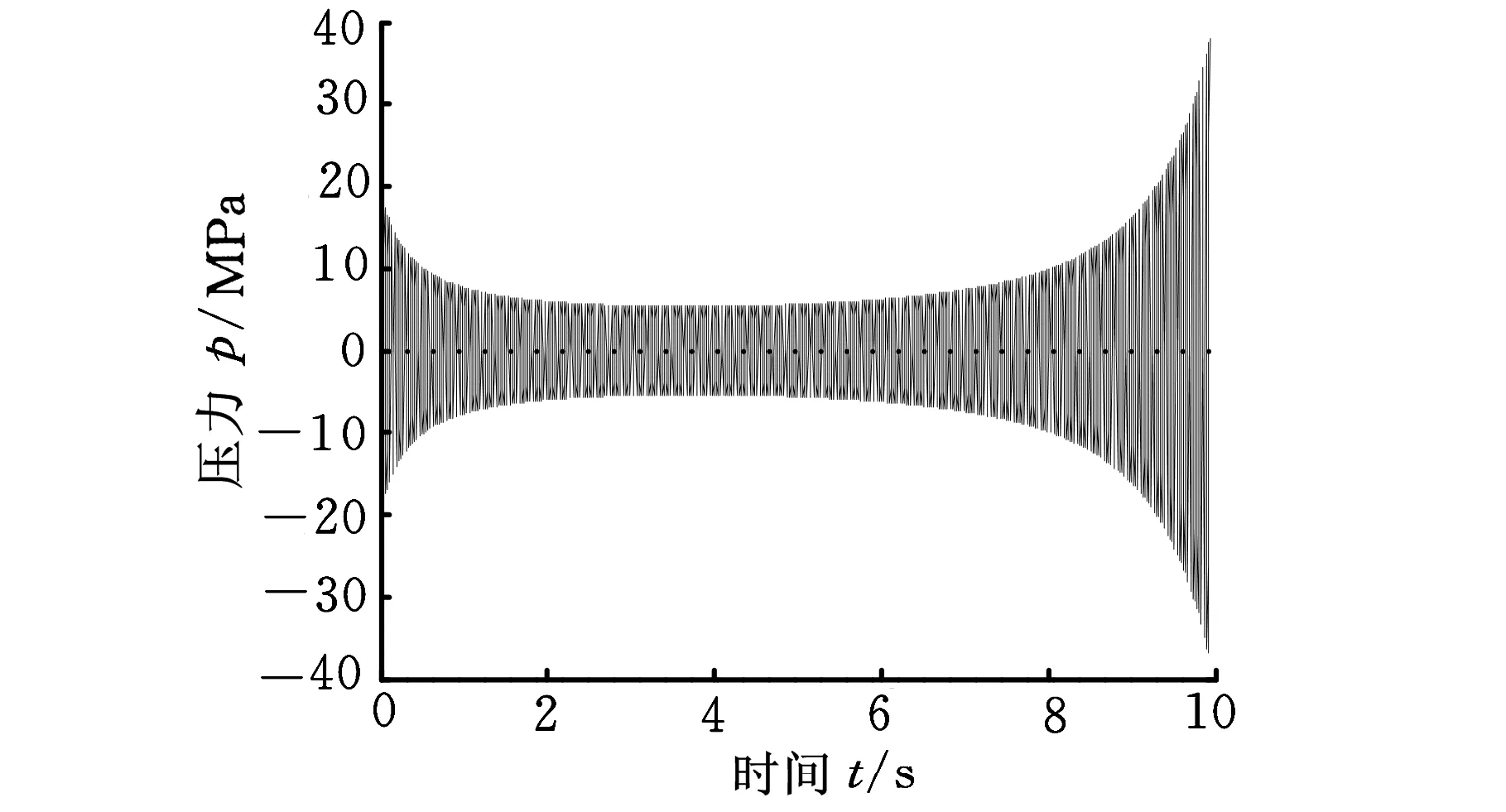
圖6 鏟斗油缸大腔壓力變化
(3)鏟斗油缸壓力分布情況。圖6所示為輸入方波信號,振動頻率為25 Hz,振動流量控制比例為0.5時,鏟斗大腔的壓力分布情況。從圖6可以看出,該條件下鏟斗大腔最大壓力達到了38 MPa,超出了系統的額定壓力(一般情況下為30 MPa),因此,振動控制參數的選擇需要進行鏟斗油缸壓力理論計算,并根據液壓系統的工作壓力以及控制閥背壓參數,對控制參數進行優化選擇。
4 試驗驗證
為了驗證流量振動控制的動力學模型,對液壓挖掘機樣機進行空載振動試驗,測試鏟斗振動油缸的壓力和流量參數。在鏟斗油缸上輸入方波信號,驅動頻率f=1/12 Hz。壓力和流量測試曲線如圖7所示。從測試數據看,鏟斗油缸的流量近似為方波信號,振動最大流量約為56L/min,靜力挖掘流量為零。鏟斗油缸的最大壓力為1.7MPa(17bar)。

圖7 鏟斗油缸的測試壓力和流量曲線
根據試驗條件,輸入方波振動控制信號,得到液壓油缸的壓力曲線如圖8所示,從圖8可以看出,鏟斗油缸的最大壓力為2.25MPa。實際上,鏟斗油腔的壓力還與液壓油阻尼、管道長度以及連接機構的間隙等因素有關,受液壓系統中泵功率恒定影響,理論計算的壓力變化規律與實際測量值不同,鏟斗油缸理論計算的最高壓力與測試值基本接近,驗證了流量振動控制的動力學模型的正確性。
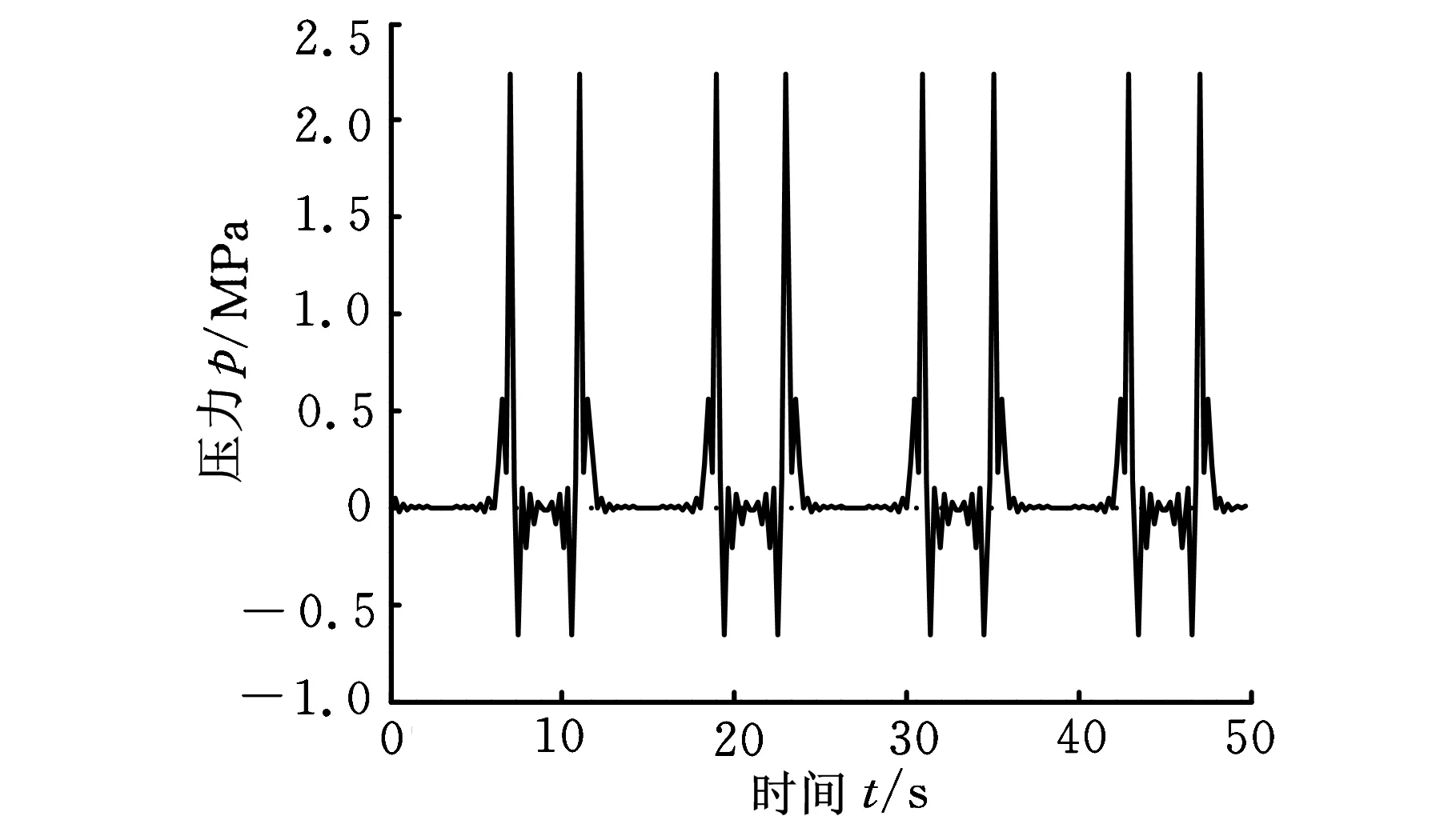
圖8 鏟斗油缸的模型計算壓力
5 結束語
在流量振動控制信號中,利用傅里葉級數表示三角波、方波信號,解決了原始信號求導問題;采取流量控制方式時,應優先考慮方波信號,方波流量振動控制信號可獲得較大的振動挖掘力,而正弦信號的振動挖掘力值最小,三角波介于兩者之間;靈敏度系數、鏟斗油缸壓力的分析為振動挖掘控制參數的確定提供了理論依據。最后利用試驗對流量振動控制模型進行了檢驗,驗證了理論模型的正確性。
[1]朱建新,郭鑫,鄒湘伏,等.巖土振動掘削技術研究現狀及其發展趨勢[J].工程機械,2006,37(1):33-38.
ZhuJianxin,GuoXin,ZouXiangfu,etal.ResearchSituationofVibratoryExcavationTechnologyforRockandSoilandItsDevelopingTrend[J].ConstructionMachineryandEquipment,2006,37(1):33-38.
[2]韓軍,張德恩,楊宏,等.軍用工程機械原理與技術[M]. 北京:國防工業出版社, 2011.
[3]郭鑫.液壓挖掘機振動掘削減阻機理分析及參數優選[D].長沙:中南大學,2006.
[4]胡火焰.液壓挖掘機鏟斗振動掘削減阻及能耗機理研究[D].長沙:中南大學,2007.
[5]朱建新.液壓挖掘機振動掘削機理及其過程優化建模與智能控制策略研究[D].長沙:中南大學,2008.
[6]SaqibGS,WrightME.VibratoryDiggersforHarvestingSweetPotatoesinCloddySoils[J].JournalofAgriculturalEngineeringResearch,1986,34(1):53-61.
[7]NiyamapaT,SalokheVM.LaboratoryInvestigationsintoSoilFailureUnderVibratoryTillageTools[J].JournalofTerramechanics,1993,30(6):395-403.
(編輯袁興玲)
Analysis of Flow Control Parameters for Vibratory Excavation System
Han JunXiao WeiFeng JixinXu LiangGu Jun
The First Engineers Scientific Research Institute of the General Armaments Department,Wuxi,Jiangsu,214035
Flow control parameters play an important role in controlling excavating force and improving vibratory excavation effectiveness for different soil types.A kinematics model of multi mechanical linkages for vibratory excavation was established.Sensitivity coefficient relation between cylinder rod displacement and bucket tooth amplitude was derived,and solution method for vibratory excavation force and cylinder rod pressure was given.The key problems of square wave and triangular wave which could not be differentiated under normal conditions were solved using Fourier series in the flow control signals.The flow control parameters of waveform,sensitivity coefficient and pressure distribution were analyzed using numerical calculation.The vibration model of flow control was verified by tests.The results will provide theoretical basis for vibratory excavation control system development.
vibratory excavation;kinematics;excavation force;waveform;sensitivity
2014-04-14
TH113.1;O311DOI:10.3969/j.issn.1004-132X.2015.06.010
韓軍,男,1966年生。總裝工程兵科研一所研究員、博士。主要研究方向為機械振動與控制。專著2部,發表論文70余篇。肖偉,男,1976年生。總裝工程兵科研一所工程師。馮繼新,男,1972年生。總裝工程兵科研一所高級工程師。徐亮,男,1979年生。總裝工程兵科研一所工程師。顧俊,男,1985年生。總裝工程兵科研一所工程師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19