液壓型風力發電機組主傳動系統壓力控制特性研究
2015-10-29 03:32:18葉壯壯孔祥東廖利輝
中國機械工程 2015年6期
關鍵詞:系統
艾 超 葉壯壯 孔祥東 廖利輝
1.燕山大學河北省重型機械流體動力傳輸與控制實驗室,秦皇島,0660042.先進鍛壓成形技術與科學教育部重點實驗室(燕山大學),秦皇島,066004
液壓型風力發電機組主傳動系統壓力控制特性研究
艾超1,2葉壯壯1,2孔祥東1,2廖利輝1,2
1.燕山大學河北省重型機械流體動力傳輸與控制實驗室,秦皇島,0660042.先進鍛壓成形技術與科學教育部重點實驗室(燕山大學),秦皇島,066004
液壓型風力發電機組主傳動系統為定量泵-變量馬達閉式系統,風機并網后依靠變量馬達變排量機構對系統進行控制。研究了系統壓力控制特性,建立了并網后主傳動系統數學模型,得出了系統壓力對馬達斜盤擺角的傳遞函數。利用MATLAB辨識工具箱,根據實驗數據,對系統壓力控制模型進行數據辨識,并與理論模型進行對比,驗證了理論模型的準確性,為液壓型風力發電機組通過壓力控制實現最佳功率追蹤控制奠定理論與實驗基礎。
風力發電;定量泵-變量馬達;壓力控制;數據辨識
0 引言
自20世紀80年代美國等發達國家建立示范風電場以來,風能成為電網新電源[1]。風能作為可持續發展的綠色新能源,越來越受到世界各國的關注,許多國家都開始發展風電產業[2]。其中,對于液壓型風力發電機組的研究,代表性機構有挪威的Chapdrive公司、德國亞琛工業大學以及蘇格蘭的Artemis Intelligent Power公司等[3]。
傳統風機(齒輪式以及永磁同步式)主要是對發電機端的轉矩進行控制(直接轉矩控制法),以實現整個發電機組的并網控制[4]。液壓型風力發電機組主傳動系統的控制是通過改變變量馬達的斜盤擺角來實現的[5],即通過改變斜盤擺角來改變系統高壓壓力。系統的高壓壓力直接關系到發電機的發電功率以及風力機的轉速。壓力控制環作為此種機型的基礎控制環節,對其控制特性進行研究是非常重要的。
本文詳細推導了系統壓力關于馬達擺角的傳遞函數表達式,分析了系統壓力動態響應特性的影響因素,并利用MATLAB辨識工具箱對實驗數據進行辨識,得到了30 kV·A實驗系統的壓力響應傳遞函數。
1 液壓型風力發電機組工作原理
圖1為液壓型風力發電機組工作原理圖,機組主要由風力機、定量泵-變量馬達閉式液壓主傳動系統及勵磁同步發電機組成。機組采用定量泵-變量馬達閉式液壓系統作為主傳動系統,液壓馬達與勵磁同步發電機剛性連接,省掉了傳統風力發電機組中發電機與電網之間必須使用的變流逆變裝備,而是直接并網運行,并網狀態下勵磁同步發電機的轉速由于電網的作用而穩定于1500 r/min的同步轉速,圖2為液壓型風力發電機組定量泵-變量馬達主傳動系統分析原理圖[6]。
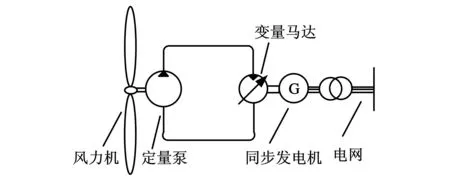
圖1 液壓型風力發電機組工作原理圖

圖2 主傳動系統分析原理圖
2 主傳動系統壓力控制數學模型與仿真分析
2.1數學模型的建立
在建立定量泵-變量馬達調速回路數學模型時,做以下幾點假設:①連接管道為剛性管且長度盡可能短,忽略管道中的壓力損失;②系統中流體的流動狀態均是層流;③每個腔室內的壓力是均勻相等的,液體密度為常數;④不考慮補油系統的影響。
(1)定量泵流量方程為
qp=Dpωp-Cip(ph-pl)-Cepph
(1)
其增量方程的拉氏變換式為
Qp=Dpωp-Ctpph
(2)
式中,Dp為定量泵排量;ωp為定量泵角轉速;Cip為定量泵內泄漏系數;Cep為定量泵外泄漏系數;ph為高壓壓力;pl為低壓壓力;Ctp為定量泵總泄漏系數。
(2)變量馬達流量方程為
(3)
由于γ和dθm/dt都是變量,因此它們的乘積具有非線性,采用泰勒級數展開的方式進行線性化處理有
(4)
忽略二階無窮小量后式(4)可簡化為
(5)
將式(5)代入式(3),并取其增量方程的拉氏變換為

(6)
式中,Cim為液壓馬達的內泄漏系數;Cem為液壓馬達的外泄漏系數;Ctm為液壓馬達的總泄漏系數,Ctm=Cim+Cem;Km為變量馬達排量梯度;γ為變馬達變量機構擺角,在[0,1]區間取量綱一數值;γ0為變量馬達變量機構初始擺角;ωm為變量馬達的角速度;ωm0為變量馬達的初始角速度;θm為變量馬達角位移;θm0為變量馬達初始角位移;V0為定量泵和變量馬達之間高壓管路總容積;βe為油液綜合體積彈性模量。
(3)定量泵和變量馬達之間高壓腔的流量連續方程。聯立式(2)和式(6)得
(7)
(4)系統壓力關于變量馬達擺角的傳遞函數。整理式(7)即可求出系統壓力關于變量馬達擺角的傳遞函數如下:
(8)
式中,Ct為總的泄漏系數,Ct=Ctp+Ctm。
利用式(8),結合液壓主傳動系統控制形式得到壓力控制框圖,如圖3所示。其中,Jm為液壓馬達轉動慣量,Bm為液壓馬達的黏性阻力。
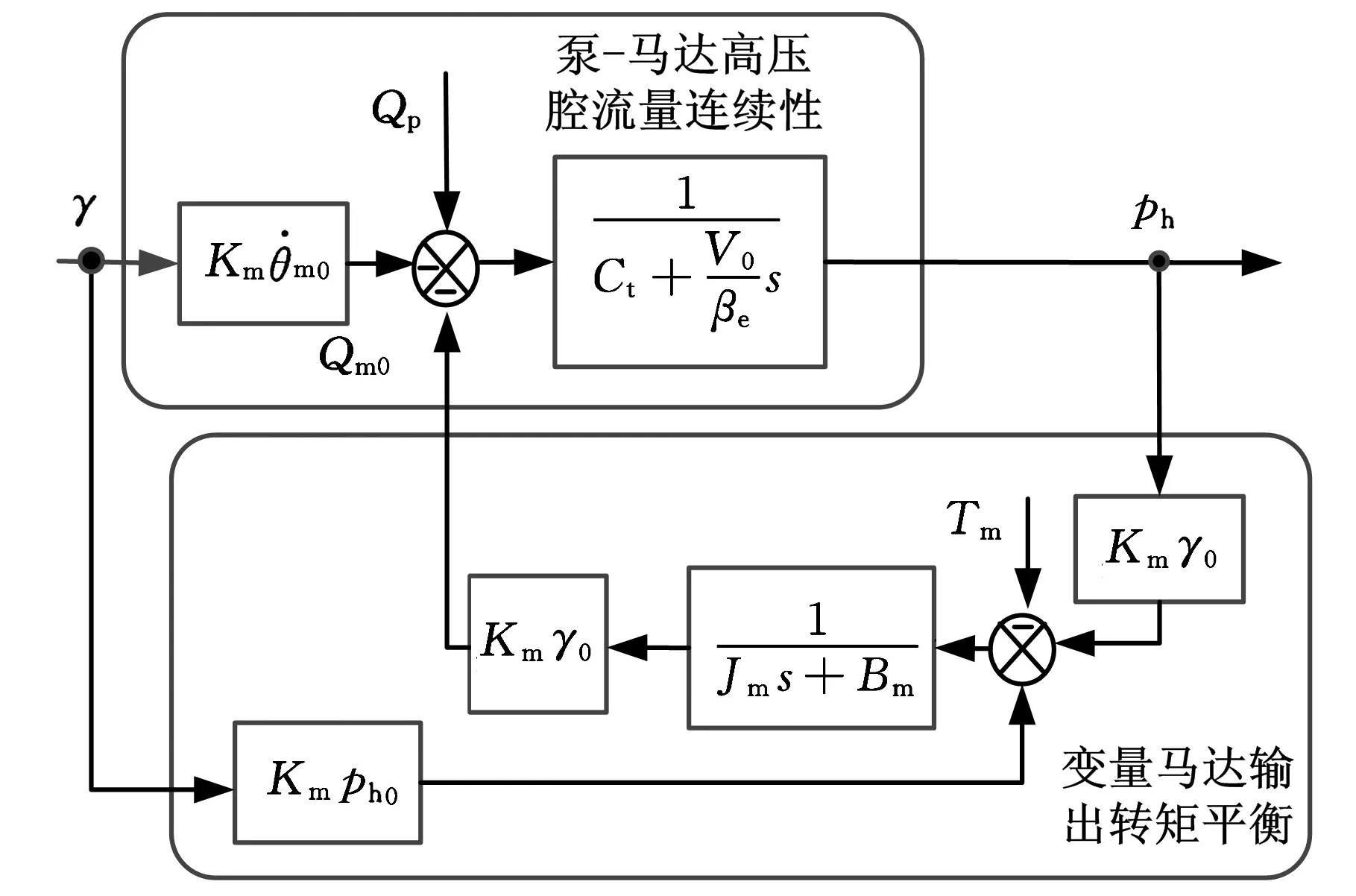
圖3 液壓系統壓力控制框圖
當發電機并入電網后,由于電網與發電機的相互作用,馬達負載轉矩Tm可實時跟隨液壓系統壓力變化。不考慮容積效率,系統流量平衡時,定量泵的流量與變量馬達的流量相等,由于控制框圖是由增量表達式推導出來的,所以Qp=Qm0=0,則式(8)可化簡為
(9)
定義壓力對變量馬達擺角增益Kp γ=Kmωm0/Ct。
系統壓力是系統功率響應的中間變量(液壓系統傳輸功率P=Kmωm0γph),欲提高發電功率,首先要提高系統壓力。由式(9)可知,系統壓力關于變量馬達擺角的傳遞函數是一個典型的慣性環節和比例環節,并且系統壓力變化量只與馬達擺角變化量有關,與系統初始壓力和擺角初始位置無關。
2.2傳遞函數階躍響應仿真分析
由于泄漏系數與油液綜合體積彈性模量在正常實驗時可認為是變化不大的[7],所以搭建系統仿真模型時,我們重點分析了高壓腔容積V0對系統特性的影響。
給定馬達擺角一階躍信號,高壓壓力變化值的階躍響應曲線如圖4所示(模型參數取值如表1所示)。
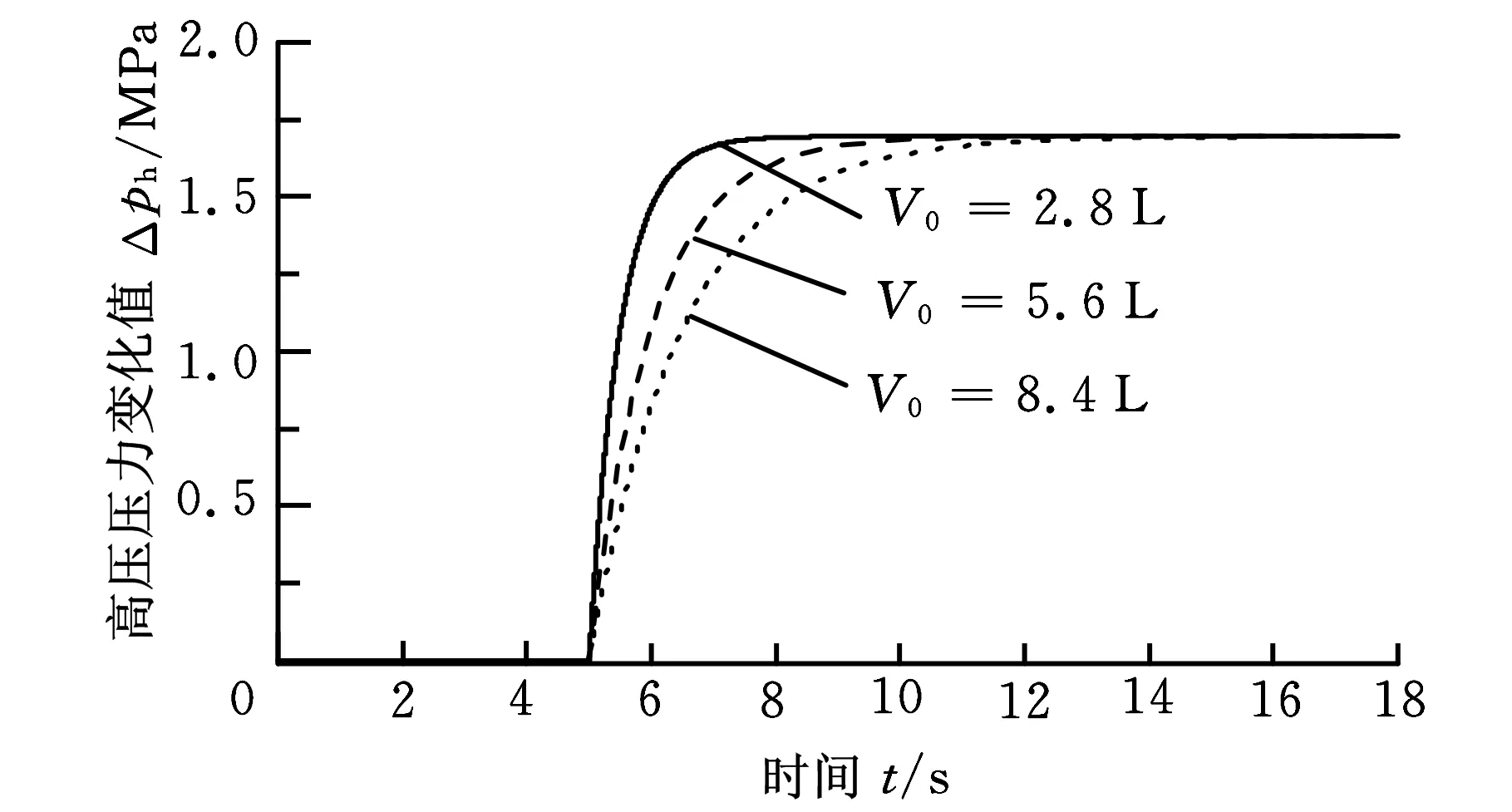
圖4 不同V0值下的壓力變化響應曲線

參數量數值Km(m3/rad)6.3662×10-6ωm0(rad/s)157γ0~1Ct(m3/(s·Pa)0.8×10-11βe(Pa)7×108V0(L)2.8Kpγ(Pa)125.6×106
在5 s時,給定馬達擺角同一階躍變化值,對于三個不同高壓腔容積V0值,可以看出壓力響應有明顯的差異。響應時間隨著V0的增大而增大,且受V0的影響較為顯著。所以為了提高系統壓力動態響應特性,希望系統的初始容積越小越好。
3 主傳動系統壓力關于馬達擺角變化實驗分析
圖5為30kV·A液壓型風力發電機組實驗平臺實物圖,實驗平臺主要由風力機模擬系統、定量泵-變量馬達液壓主傳動系統以及并網發電系統組成。實驗系統參數值如表1所示。
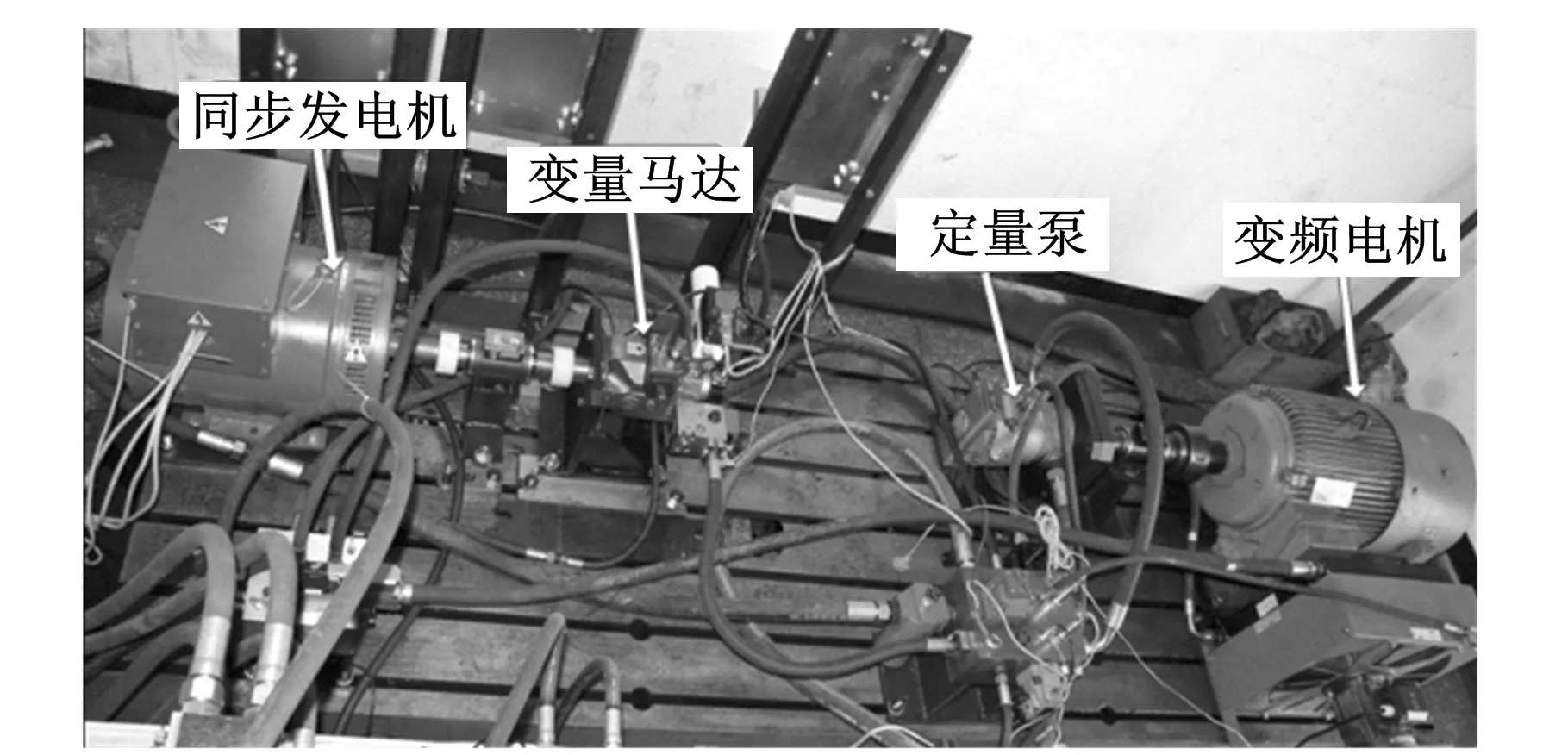
圖5 30 kV·A液壓型風力發電機組實驗平臺實物圖
在一定定量泵轉速下,給定馬達擺角階躍變化值,系統壓力和馬達擺角變化曲線如圖6所示(定量泵轉速800 r/min,馬達擺角給定0.855~0.835)。

(a)壓力響應曲線

(b)擺角給定曲線圖6 系統壓力對馬達擺角變化響應實驗曲線
實際上,馬達擺角(即擺角真實值)的階躍給定由擺角補償值確定,馬達擺角真實值由斜盤基準值和斜盤偏差組成,在控制的時候調定斜盤偏差即可完成信號的給定。
從圖6可以看出,壓力響應曲線稍微滯后于擺角給定曲線,壓力響應無超調,響應時間2 s左右。同時,可以看出壓力響應曲線和理論仿真曲線(圖4)趨勢較為接近,這也驗證了理論建模的準確性。
為了準確得到系統壓力對馬達擺角的傳遞函數,我們利用MATLAB辨識工具箱[8]對實驗數據進行辨識,辨識結果如圖7所示,可得系統壓力對馬達擺角傳遞函數為
(10)
系統壓力所用單位為bar,1 bar=100 kPa。
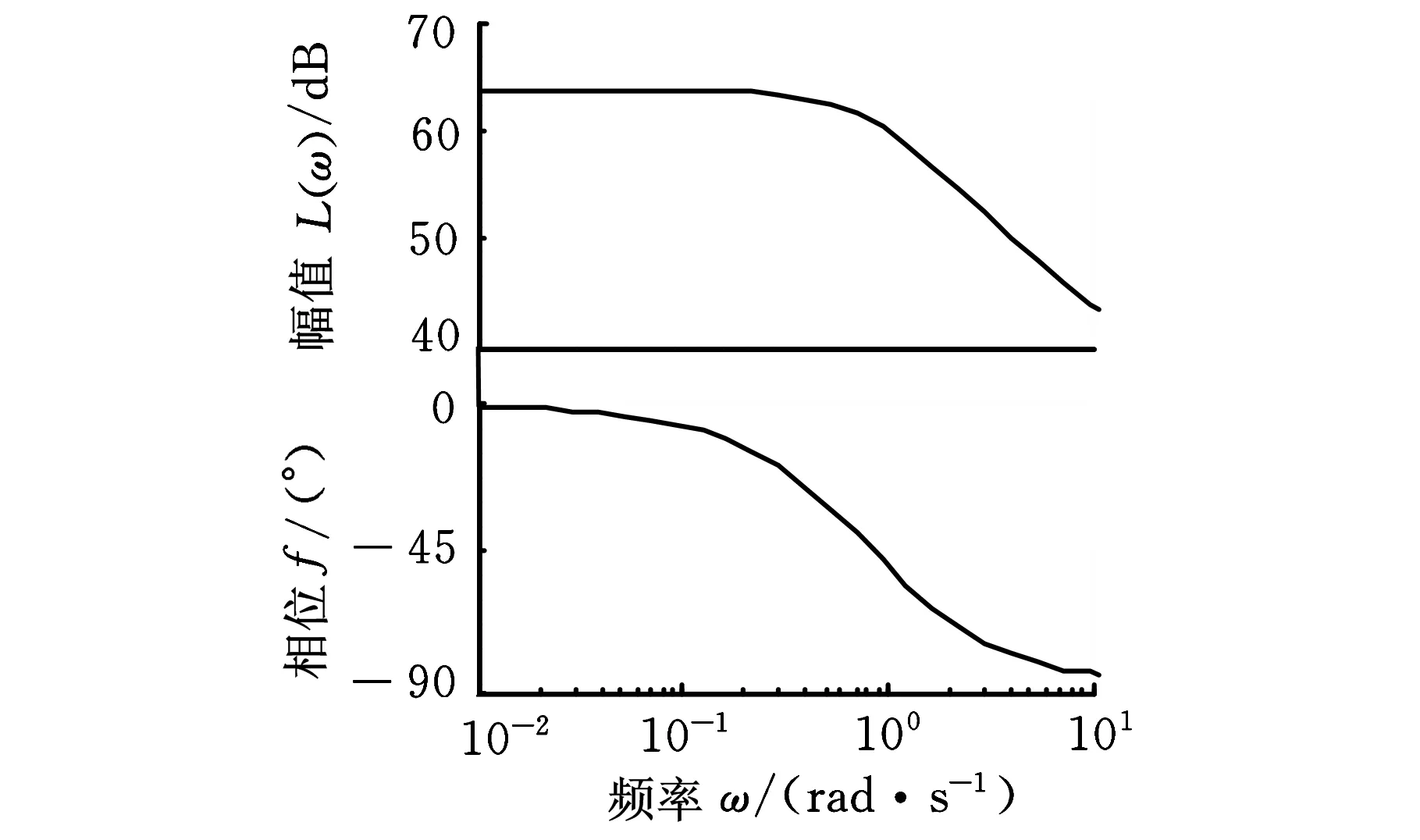
(a)伯德圖
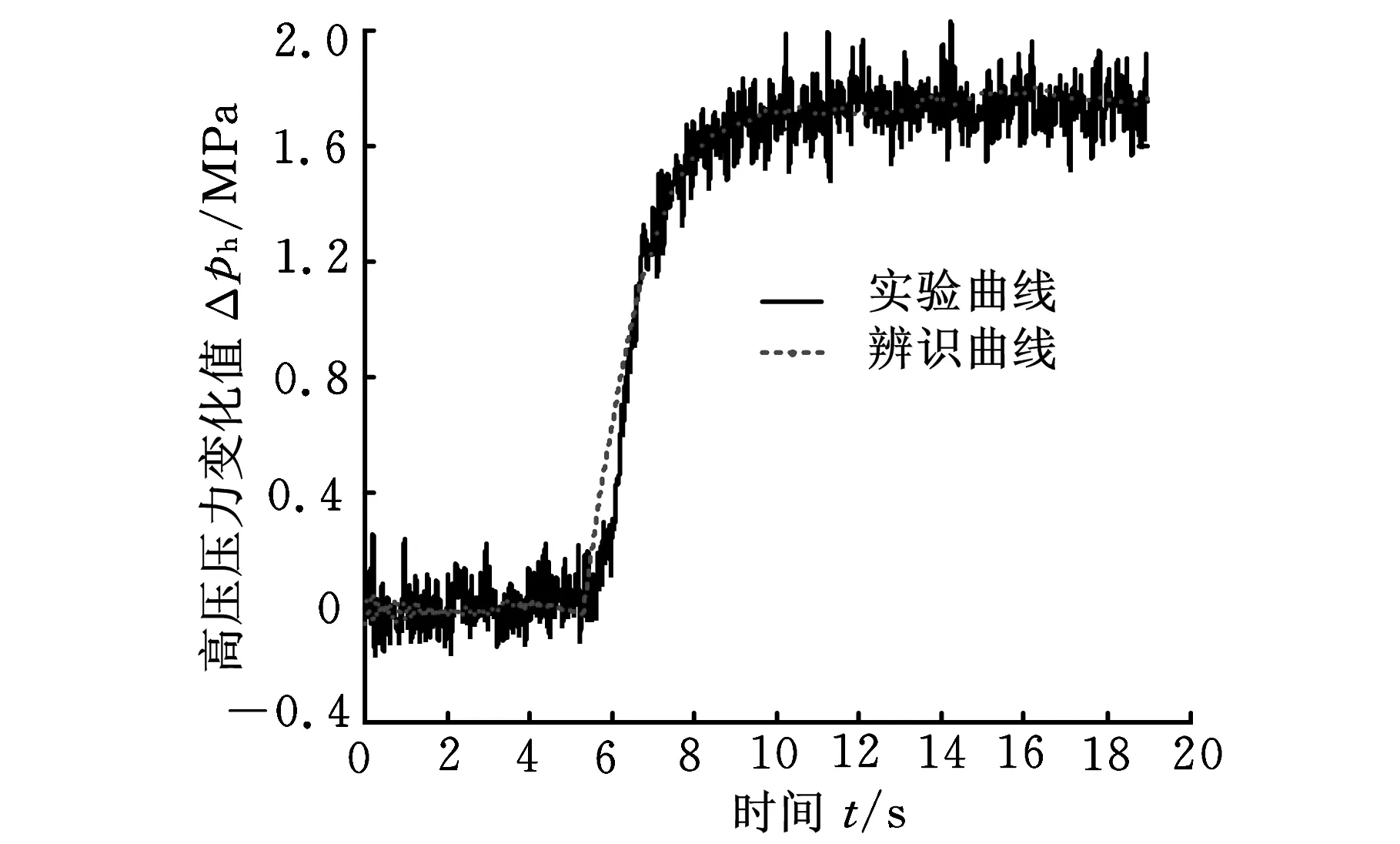
(b)辨識結果圖7 系統壓力對馬達擺角變化的辨識結果
伯德圖如圖7a所示,辨識精度如圖7b所示,由于慣性時間常數為V0/(βeCt),比例系數為Kmωm0/Ct,所以有
(11)
(12)
式(11)中V0與βe受系統結構、外部環境等方面因素影響不能得到精確值,而式(12)中Km是馬達排量梯度、ωm0是馬達角轉速,其值可以明確得到。根據式(12)求出此液壓系統此時的總泄漏系數Ct為0.73×10-11m3/(s·Pa)。實驗數值與理論數值(表1)較為接近,但值得注意的是,經辨識方法求得的泄漏系數為系統采集該實驗數據時的對應值,系統在運行過程中會發生一定的變化。
4 結論
(1)本文以液壓型風力發電機組液壓主傳動系統為研究對象,建立了定量泵-變量馬達液壓主傳動系統壓力控制數學模型。
(2)通過所建立的數學模型,分析得出以下結論:系統壓力關于馬達斜盤擺角的傳遞函數由典型的慣性環節和比例環節組成,且與液壓主傳動系統的初始狀態無關,而其響應特性與高壓腔容積有明顯的關系,響應時間隨著容積的增大而變長。
(3)基于30 kV·A液壓型風力發電機組實驗平臺,本文對壓力關于馬達擺角變化進行了實驗分析,利用MATLAB辨識工具箱對實驗數據進行系統辨識,驗證了理論分析的正確性,為下一步研究泄漏系數對慣性時間常數的影響奠定了基礎。
[1]劉德順,戴巨川,胡燕平,等.現代大型風電機組現狀與發展趨勢[J].中國機械工程,2013,24(1):125-126.
Liu Deshun,Dai Juchuan, Hu Yanping,et al.Status and Development Trends of Modern Large-scale Wind Turbines[J]. China Mechanical Engineering, 2013,24(1):125-126.
[2]GWEC. Globle Wind Report 2013[R].Belgium: Global Wind Energy Council,2014.
[3]Diepeveen N F B.On the Application of Fluid Power Transmission in Offshore Wind Turbines[D].Netherlands:TU Delft,2013.
[4]林志明,潘東浩,王貴子,等.雙饋式變速變槳風力發電機組的轉矩控制[J].中國電機工程學報,2009,29(32):118-123.
Lin Zhiming,Pan Donghao,Wang Guizi,et al. Torque Control of Doubly-fed Variable Speed Variable Pitch Wind Turbine[J].Proceedings of the CSEE,2009,29(32):118-123.
[5]孔祥東,艾超,王靜.液壓型風力發電機組主傳動控制系統綜述[J].液壓與氣動,2013(1):1-6.
Kong Xiangdong,Ai Chao,Wang Jing.A Summary on the Control System of Hydrostatic Drive Train for Wind Turbines[J].Chinese Hydraulics & Pneumatics,2013(1):1-6.
[6]張剛.液壓型風力發電機組主傳動系統功率控制研究[D].秦皇島:燕山大學,2012.
[7]薛曉虎.液壓系統縫隙內流體泄漏特性的分析[J].機械工程學報,2004,40(6):75-80.
Xue Xiaohu.Analysis on the Fluid-Leakage Characteristic in Gaps of the Hydraulic System[J].Journal of Mechanical Engineering,2004,40(6):75-80.
[8]劉數軍,蓋曉華,樊京,等.MATLAB7.0控制系統應用與實例[M].北京:機械工業出版社,2006.
(編輯袁興玲)
Pressure Control Characteristics of Main Transmission System of Hydraulic Transmission Wind Energy Conversion System
Ai Chao1,2Ye Zhuangzhuang1,2Kong Xiangdong1,2Liao Lihui1,2
1.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control,Yanshan University,Qinhuangdao,Hebei,066004 2.Key Laboratory of Advanced Forging & Stamping Technology and Science(Yanshan University),Ministry of Education of China,Qinhuangdao,Hebei,066004
Fixed displacement pump-variable displacement motor is the main drive system of hydraulic type wind turbine,the system is controlled by a variable displacement mechanism after grid-connected.To study the pressure control characteristics,a mathematical model was built and the transfer function describing the pressure to the position of the motor swash plate was derived.Compared with the identified model obtained from data identification in MATLAB system,the built model was verified,which laid theoretical and test foundation for further maximum power point tracking(MPPT) based on pressure control in hydraulic type wind turbine.
wind power;fixed displacement pump-variable displacement motor;pressure control;data identification
2014-07-28
國家自然科學基金資助項目(51405423);河北省青年基金資助項目(QN20132017);燕山大學青年教師自主研究計劃資助項目(13LGB005)
TH137;TK8DOI:10.3969/j.issn.1004-132X.2015.06.004
艾超,男,1982年生。燕山大學機械工程學院講師。主要研究方向為液壓型風力發電機組。發表論文14篇。葉壯壯,男,1990年生。燕山大學機械工程學院碩士研究生。孔祥東,男,1959年生。燕山大學機械工程學院教授、博士研究生導師。廖利輝,男,1986年生。燕山大學機械工程學院碩士研究生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32