深水錨在海床中復雜動力行為的分析模型
2015-10-27 04:41:43宋海娟劉海笑趙燕兵
海洋工程 2015年6期
關鍵詞:方向
宋海娟,劉海笑,趙燕兵
(天津大學 建筑工程學院,天津 300072)
深水錨在海床中復雜動力行為的分析模型
宋海娟,劉海笑,趙燕兵
(天津大學 建筑工程學院,天津 300072)
深水錨是深水系泊系統的核心組成,隨著新概念和新技術在深水系泊領域的不斷涌現和發展,深水錨在海床中的動力行為變得更為復雜,這給既有的分析方法帶來極大的挑戰。將深水錨的復雜動力行為視為拔出、旋轉、嵌入三種典型行為的組合,分別給出明確定義并建立力學模型。提出最小力準則以確定錨的拔出、嵌入方向和旋轉中心,該準則同時可作為拔出、旋轉、嵌入行為是否發生的判定條件,從而建立起可以描述深水錨在海床中復雜動力行為的分析模型。為檢驗所提出的分析模型,將其應用于預測拖曳錨在海床中的嵌入運動軌跡,并與已有分析方法和離心機試驗結果進行對比,驗證了該分析模型的有效性。
深水錨;動力行為;分析模型;運動軌跡;海床
隨著國際海洋油氣開發邁入深水和超深水,大型浮式海洋平臺及適用于深水油氣開發的繃緊式系泊方式得到了日趨廣泛的應用,同時也對深水系泊系統的安裝穩定性和系泊性能提出了更高的要求。深水錨是深水系泊系統的核心組成部分,工程中常見的深水錨類型有吸力錨、拖曳錨、吸力嵌入式板錨和重力貫入錨,如圖1所示。由于迥然各異的結構特性和安裝方式,不同類型的深水錨在海床中的動力行為復雜且各具特點,如吸力錨在負壓作用下的定點沉貫,拖曳錨在海床中長距離的拖曳安裝,吸力嵌入式板錨在負壓定點貫入后的旋轉,以及重力貫入錨在自重作用下的初始貫入和在海床中后續的旋轉和嵌入。深水錨在海床中的這些復雜動力行為,不斷更新人們的既有認知,挑戰人們的分析能力。
深水錨在海床中所體現的復雜動力行為,一方面是其安裝技術的需要,以拖曳錨的安裝過程為例,拖曳錨拋錨至海床面后,基于錨板自身結構與海床面形成一定的初始角度,通過拖船緩慢的水平移動,錨板逐漸下嵌至目標深度,同時錨板與水平面的夾角,即方位角,也發生變化,如圖2所示;另一方面體現在系泊狀態尤其在極端環境下能保證更大的承載力。以重力貫入錨為例,2008年在墨西哥灣的現場測試發現[1],在經歷一場大風暴后,組成系泊系統的8枚初始貫入深度為15.2~18.3 m的重力貫入錨,不僅沒有隨大幅漂移的平臺被拔出,相反在7根系纜先后斷裂的情況下,出人意料地在海床中均不同程度地達到了更大埋深(19.2~36.6 m),從而有效化解了在極端環境下因平臺系泊系統受損導致的次生災害。重力貫入錨這種可抵御災害條件的優異性能,正是由于其在極端載荷條件下具有復雜的動力行為。可以說,深水錨在海床中的復雜動力行為不僅與其安裝技術和系泊性能密切相關,更是大型浮式海洋平臺在極端載荷條件下重要的安全保障。
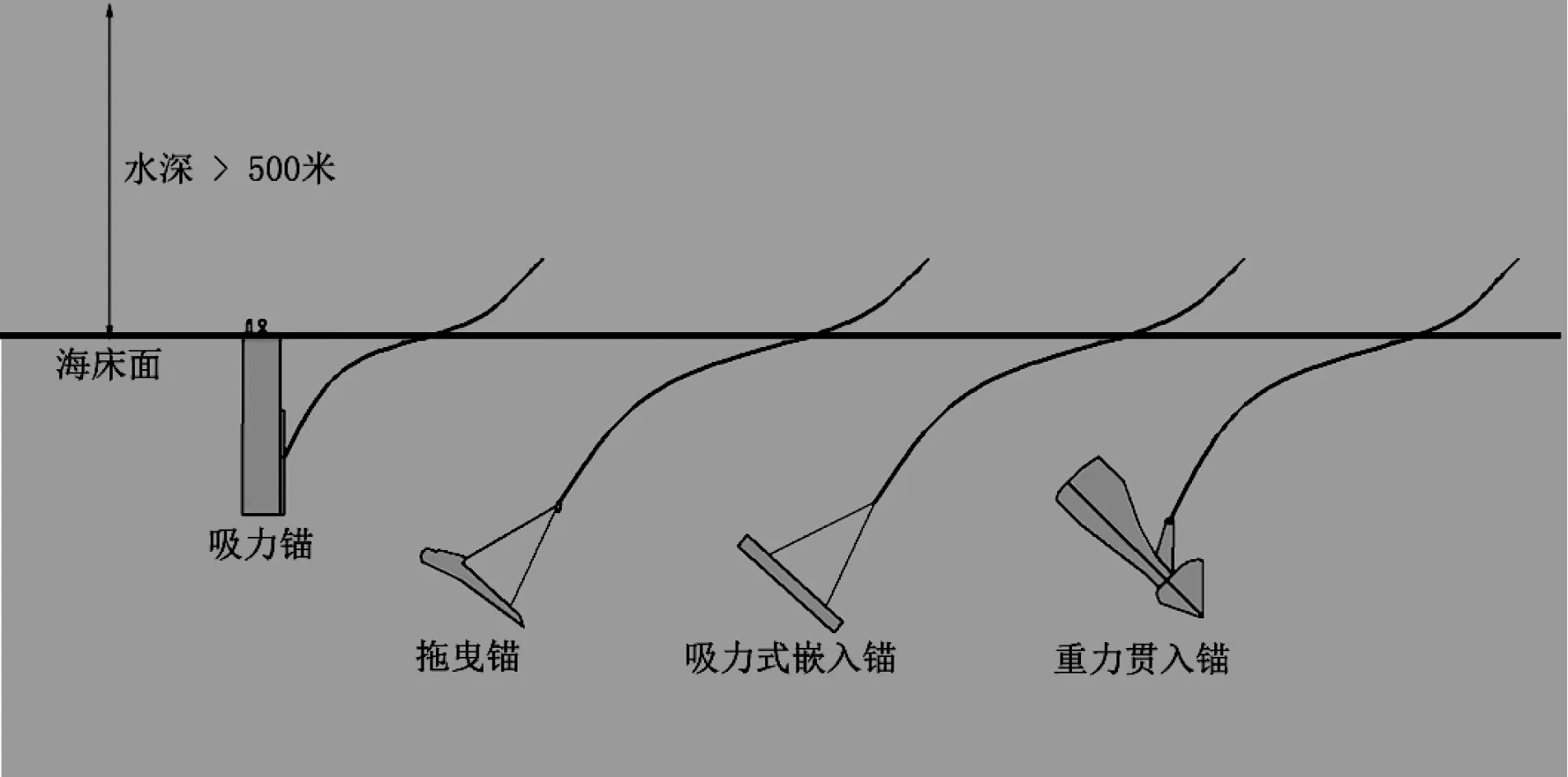
圖1 典型深水錨示意Fig. 1 Schematic of typical deepwater anchors
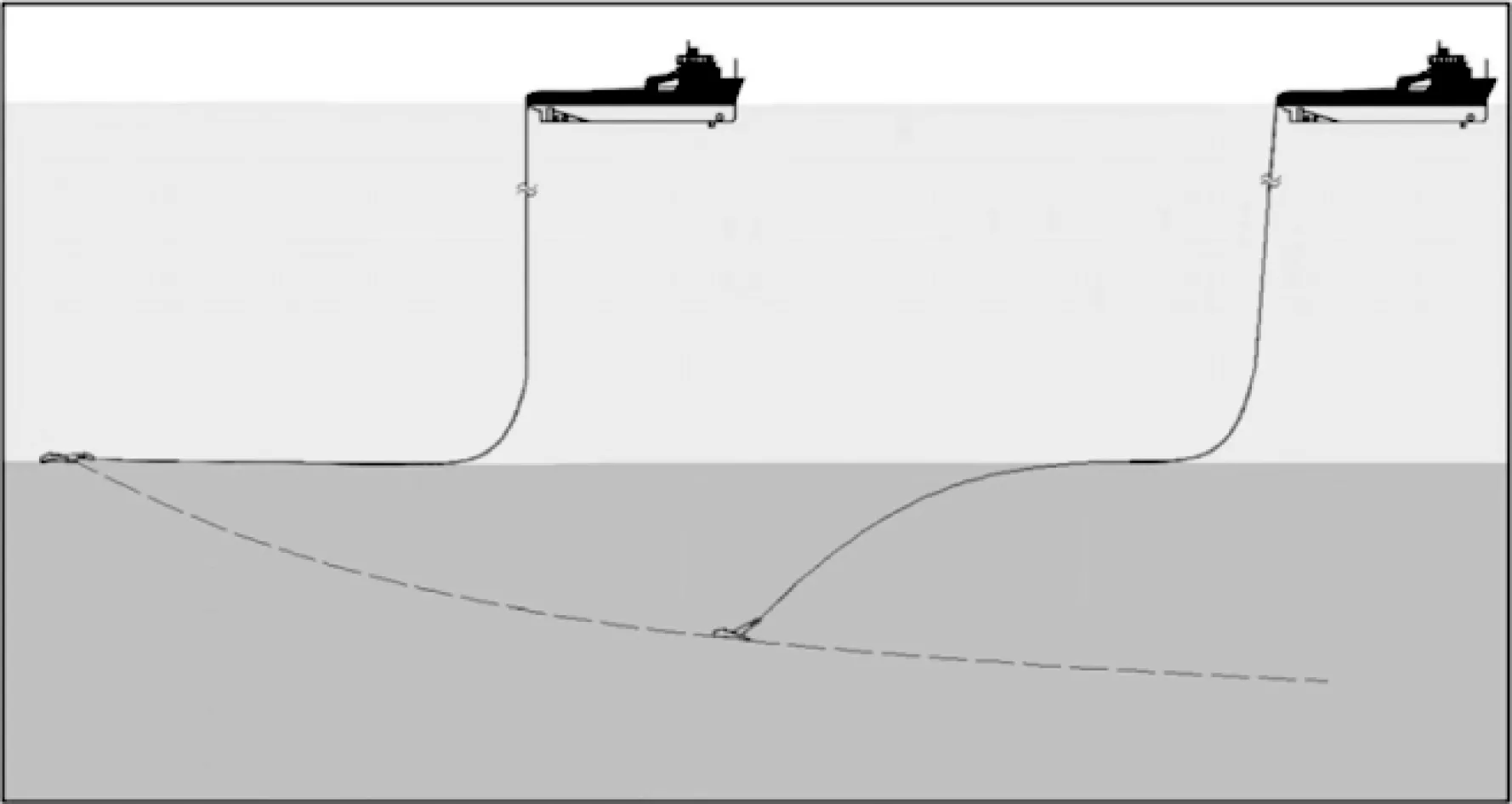
圖2 拖曳錨安裝過程示意Fig. 2 Schematic of the drag anchor installation process
從物理學角度分析,深水錨的上述復雜動力行為可以描述為其深度和方位角的變化,在理論分析時均可看作拔出、旋轉和嵌入三種行為共同作用的結果。例如,在研究拖曳錨的運動軌跡時,通常將其視為嵌入和旋轉行為的組合[2-5]。對于拖曳錨的嵌入行為,研究者們通常假設錨沿板面行進[2-5]。對于拖曳錨的旋轉行為,目前有兩種典型處理方式:一種是假設在錨的整個嵌入過程中拖曳力與錨板夾角,即拖曳角,為一特征常數(如等于錨脛角),當拖曳角大于該特征常數時,錨發生旋轉[3];另一種是對錨建立力矩平衡方程,當不滿足力矩平衡時,錨發生旋轉[2,4-5]。在研究吸力嵌入式板錨在負壓定點貫入后的埋深損失時,通常將其視為旋轉和拔出的組合,目前僅有的理論分析方法為Cassidy等[6]基于塑性上限法開展的研究,但其屈服函數中的參數取值存在較大的不確定性。對于重力貫入錨在安裝過程中和工作狀態下的旋轉、拔出和嵌入行為,國內外尚未有相關的理論研究成果。
綜上所述,深水錨在海床中的動力行為變得更為復雜,這給既有的分析方法帶來極大的挑戰。一方面,對深水錨在海床中復雜動力行為的發生機理缺乏認識;另一方面,難以提出一套能夠準確描述不同類型的深水錨在任意載荷條件下綜合行為的力學模型。
首先將深水錨的綜合行為分解,基于實際物理情況,明確定義了錨在海床中的拔出、旋轉和嵌入行為;其次,基于承載力分析理論和極限平衡法,建立了描述深水錨拔出、旋轉和嵌入行為的力學模型;提出了最小力準則以確定錨的拔出、嵌入方向和旋轉中心,該準則同時可作為拔出、旋轉、嵌入行為是否發生的判定條件,從而建立起可以描述深水錨在海床中綜合行為的分析模型。值得注意的是,文中所提出的分析模型在確定深水錨的拔出、嵌入方向和旋轉中心以及判斷拔出、旋轉和嵌入行為是否發生時,并非事先假設,而是基于符合物理實際的力學模型及“最小力準則”直接求解,具有明確的理論依據和判定準則。為檢驗本文所提出的分析模型,將其應用于拖曳錨的嵌入運動軌跡預測,并與已有分析方法和離心機試驗結果進行了對比。
1 力學模型
深水錨的復雜動力行為可描述為其深度和方位角的變化,因此,在理論分析時,可將其分解為拔出、旋轉和嵌入行為的疊加。本節首先對錨的拔出、旋轉和嵌入行為作出嚴格定義;為確保深水錨的安裝穩定性,工程實際中其安裝速度通常極小,錨近似處于極限平衡狀態,因此,可基于承載力分析理論和極限平衡法[2-4],建立深水錨在海床中拔出、旋轉和嵌入行為的力學模型。此外,文中還引入纜繩方程,以考慮纜繩對深水錨復雜動力行為的影響。
不同類型的深水錨幾何形狀各異,但均具有典型的結構特性,即由錨板和錨脛組成。本文所提出的理論分析模型均基于該典型結構形式,如圖3所示。
1.1拔出、旋轉和嵌入行為的定義
深水錨拔出、旋轉和嵌入行為的定義如圖3所示。其中,Ta表示系纜點處的拖曳力;θm為錨運動方向與錨板上表面的夾角,以順時針方向為正,逆時針方向為負,當錨沿錨板上表面嵌入時,θm=0°。所謂拔出即錨的運動方向在海床面以上,數學上表達為-π-θ0≤θm<-θ0,見圖3(a),其中θ0表示錨板方位角,即錨板與水平面的夾角。所謂旋轉即錨繞某一固定點轉動,該點定義為旋轉中心,用Pk表示,見圖3(b)。Lb表示錨脛與錨板中軸線的交點到錨尾端中心點的距離;Lk表示旋轉中心到錨尾端中心點的距離;Lc表示拖曳力與錨板中軸線的交點到錨尾端中心點的距離。假設旋轉中心位于錨板中軸線上,以獲得最大的旋轉效率。對拖曳錨而言,由于其在整個嵌入運動過程中均為逆時針轉動,因此,旋轉中心只能位于錨尾端中心點和拖曳力與錨板中軸線交點之間,數學上表達為0≤Lk≤Lc。在定義上,嵌入與拔出行為的區別僅在于運動方向不同,所謂嵌入即錨的運動方向在海床面以下,數學上表達為-θ0≤θm<π-θ0,見圖3(c)。

圖3 拔出、旋轉和嵌入行為的定義Fig. 3 Definitions of pulling out, keying and diving

圖4 深水錨的拔出、嵌入力學模型Fig. 4 Mechanical model of the deepwater anchor under pulling out or diving
1.2拔出、嵌入行為的力學表達
由1.1節可知,拔出、嵌入行為在定義上的區別僅在于運動方向不同。典型深水錨在拔出、嵌入狀態下的受力模型如圖4所示。其中,Tt表示發生拔出或嵌入時系纜點處的拖曳力,若對應拔出,Tt為拔出拖曳力Tp;若對應嵌入,則Tt為嵌入拖曳力Td。Ttm和Ttn分別表示Tt沿運動方向和垂直于運動方向的分量。θa為拖曳力與錨板上表面的夾角;θs為錨脛角;W為錨的浮容重,Wm和Wn分別表示W沿運動方向和垂直于運動方向的分量;Fbf為錨板所受端阻力,Fbs為錨脛所受端阻力;Fsf為錨板所受摩阻力,Fss為錨脛所受摩阻力。為簡化表達,定義Fb和Fs,分別表示沿深水錨運動方向總的端阻力和摩阻力,其中Fb=Fbf+Fbs,Fs=Fsf+Fss。
沿錨板運動方向建立受力平衡方程:
由圖4所示的幾何關系,可獲得錨發生拔出、嵌入行為時的拖曳力:
飽和黏土中,借用Skempton[7]條形基礎承載力公式,可得到錨所受端阻力Fb的表達式:
其中,Ncf為錨的端阻力系數,Ab為錨的有效端阻面積,即錨在垂直于運動方向平面上總的投影面積,包括錨板和錨脛。飽和黏土可視為無摩擦材料,其不排水抗剪強度su可表示為su=su0+kz,其中,z為海床面以下的深度,su0為海床面(z=0)的土體不排水抗剪強度,k為土體不排水抗剪強度梯度。
摩阻力由土的黏滯性產生,借用摩阻力計算公式,可得到錨所受摩阻力Fs的表達式:
其中,α為土的黏滯系數,As為錨的有效摩阻面積。
因此,作用于錨的總端阻力和總摩阻力可以表示為:
其中,A~G為包含錨、土特性的系數,均為正值,如表1所示。其中涉及的深水錨特性參數見表2。圖6以典型深水錨為例,給出其面積參數的具體位置。而對于工程實際中形狀不規則的深水錨,應根據表2中的參數含義進行面積參數的取值。

表1 方程(5)中所涉及系數Tab. 1 Coefficients in Eq. 5

表2 深水錨特性參數表Tab. 2 Parameters of deep water anchors

圖5 深水錨的旋轉力學模型Fig. 5 Mechanical model of the deepwater anchor under keying
1.3旋轉行為的力學表達
深水錨在旋轉狀態下的受力模型如圖5所示。其中,Tk表示發生旋轉行為時系纜點處的拖曳力,Tkm和Tkn分別表示Tk沿錨板上表面和垂直于錨板上表面的分量。同樣,為簡化表達,定義Mb和Ms,分別代表旋轉時作用于錨的總的端阻力矩和摩阻力矩。
對錨建立力矩平衡方程:
其中,Lw為重心到錨尾端中心點的距離。
由圖5所示的幾何關系,可獲得錨發生旋轉行為時的拖曳力:
深水錨在海床中運動時,Lk與Lb的相對大小并不固定,若Lk≤Lb,作用于錨的總的端阻力矩和摩阻力矩可表示為:
其中,Lf為錨板長度,L0為錨脛中軸線的長度,A1~G1為包含錨、土特性的系數,均為正值,如表3所示。其中涉及的深水錨特性參數見表2。
若Lk>Lb,作用于錨的總的端阻力矩和摩阻力矩可表示為:
其中,A1~K1為包含錨、土特性的系數,均為正值,如表3所示。其中,nk為旋轉土抗力系數,是深水錨的旋轉行為所涉及的重要參數。運用有限元軟件ABAQUS計算了旋轉中心在錨板中軸線中點、端點兩種情況下的破壞模式。基于該破壞模式,通過塑性上限法求得了上述兩特定點的旋轉土抗力系數nk,并擬合得到了旋轉中心在錨板中軸線范圍內的nk。經驗證,當nk為二次函數時,相互作用曲線外凸,且與O’Neill等[8]的有限元結果吻合較好。計算得旋轉土抗力系數nk=6+28(Lk-Lf/2)2/Lf2。表3中其余的深水錨特性參數見表2。
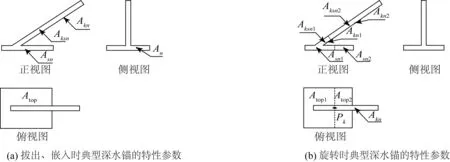
圖6 表2中參數圖示Fig. 6 Schematic of the parameters in Table 2
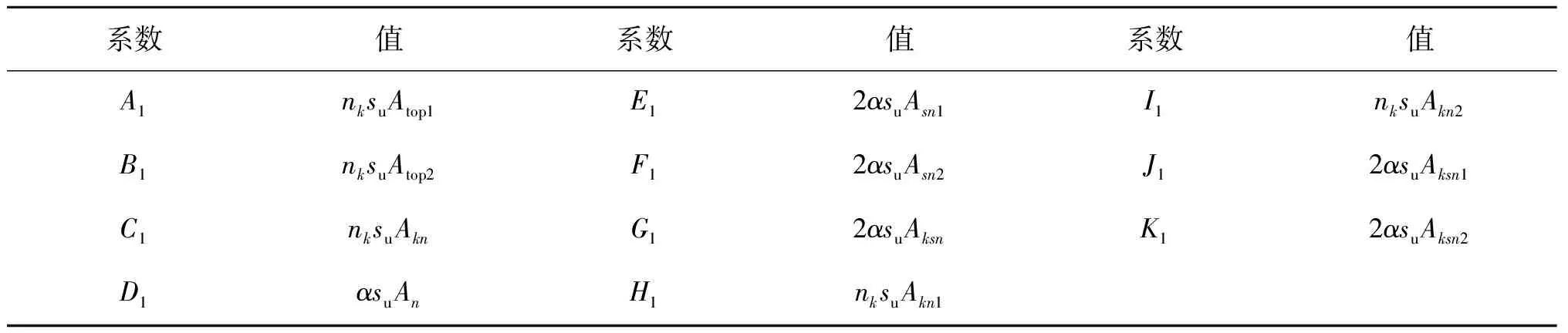
系數值系數值系數值A1nksuAtop1E12αsuAsn1I1nksuAkn2B1nksuAtop2F12αsuAsn2J12αsuAksn1C1nksuAknG12αsuAksnK12αsuAksn2D1αsuAnH1nksuAkn1
1.4纜繩方程
深水錨在海床中的動力行為不僅取決于錨和海床土的物理特性,同時受到安裝纜繩的影響,尤其是其嵌入在海床中的部分,即嵌入纜。由于海床土的抗力和摩擦作用,嵌入纜在海床中形成反懸鏈形態[9],如圖2所示。嵌入纜與錨在系纜點處發生相互作用。隨著深水錨嵌入深度的增大,系纜點處拖曳力和拖曳力與水平面的夾角θah均增大,從而使得垂直錨板平面的分力增大,促使錨板抬平,對錨的行為造成顯著影響。通過引入纜繩方程來考慮纜繩對錨動力行為的影響。
Neubecker等[10]和Zhang等[11]提出了系纜點處拖曳力Ta與θah的關系式:
式中:μ為纜繩-土摩擦系數,在飽和黏土中,Neubecker等[10]和Zhang等[11]分別建議μ取0.4~0.6和0.1~0.6;鐵鏈和鋼纜的摩擦系數μ的取值也不同,DNV[12]建議,對鋼纜取0.1~0.3,對鐵鏈取0.6~0.8;θe為嵌入點處拖曳力與水平面的夾角;za為系纜點深度;對于拖纜有效承載系數En,Degenkamp等[13]基于模型試驗,建議對鋼纜取1,對鐵鏈取2.5;d為纜繩直徑;Ncl為纜繩端阻力系數。
根據物理實際,系纜點拖曳力與水平面的夾角θah和錨板方位角θo始終存在如下關系:
2 關鍵技術
關鍵技術包含兩部分內容。首先,介紹最小力準則及其應用:1)用于判斷錨的拔出、嵌入方向和旋轉中心;2)作為拔出、旋轉、嵌入行為是否發生的判定條件。其次,給出深水錨在海床中復雜動力行為的分析流程。
2.1最小力準則
對深水錨復雜動力行為機理的正確認識是研究其綜合行為的基礎。根據第1節內容,深水錨的綜合行為可視為拔出、旋轉和嵌入行為的組合,但拔出、嵌入方向和旋轉中心的位置,以及拔出、旋轉和嵌入行為發生的條件,仍然需要合理確定。對此,本節運用了“最小力準則”,即物體總是趨向于按最容易發生運動的狀態進行運動,對于深水錨在海洋土中的復雜動力行為,“最容易”發生運動的狀態即為拖曳力最小時的狀態。該準則在分析拖曳錨的嵌入運動方向[14]和吸力錨的破壞模式[15]中已有成功應用。
2.1.1 拔出和嵌入時錨的運動方向
拔出、嵌入時的最小力準則是其第一層含義的應用,假設深水錨有一系列可能的運動方向,真正的運動方向是使其最容易發生運動的方向,即當拔出或嵌入拖曳力最小時的運動方向。
由式(2)、(5)可知,拔出、嵌入時的拖曳力Tt為θm的函數。通過研究Tt對θm的一階導數,可確定使拔出、嵌入拖曳力最小的真實破壞方向角θm:
其中,Tt(θm)=(dFb/dθm+dFs/dθm)cos(θa+θm)+(Fb+Fs)sin(θa+θm)-Wcos(θa-θo),拔出時-π-θ0≤θm<-θ0,嵌入時-θo≤θm≤π-θo。
Tt(拔出、嵌入分別對應Tp和Td)的最小值僅可能在以下特定點取得:
1)邊界點,對于拔出即θm=-π-θo和θm=-θo,對于嵌入即θm=-θo和θm=π-θo;
2)滿足方程dTt/dθm=0的點,對于拔出即dTp/dθm=0,對于嵌入即dTd/dθm=0;
3)一階導數不存在的點。
根據“最小力準則”,在這三類特定點中,最小值min(Tp)和min(Td)對應的θm值即為錨真實的拔出和嵌入方向。
2.1.2 旋轉時的旋轉中心
旋轉時的最小力準則也是其第一層含義的應用,假設深水錨有一系列可能的旋轉中心,真正的旋轉中心是使其最容易發生旋轉的旋轉中心,即當旋轉拖曳力最小時的旋轉中心。令Wb=Fb(Lk)·DFb(Lk),Ws=Fs(Lk)·DFs(Lk),其中,Fb(Lk)、DFb(Lk)分別代表廣義的端阻力、端阻力矩,Fs(Lk)、DFs(Lk)分別代表廣義的剪切力、剪切力矩。由式(7)、(8)可知,嵌入拖曳力Tk為Lk的函數,通過研究Tk對Lk的一階導數,可確定使旋轉拖曳力最小的真實的旋轉中心位置:
其中,Tk(Lk)=dFb/dLk·DFb+dDFb/dLk·Fb+dFs/dLk·DFs+dDFs/dLk·Fs,0≤Lk≤Lc。
同理,Tk的最小值僅可能在以下特定點取得:
1)邊界點,即Lk=0和Lk=Lc;
2)滿足方程dTk/dLk=0的點;
3)一階導數不存在的點。
根據“最小力準則”,在這三類特定點中,Tk取得最小值min(Tk)時的Lk值即為錨真實的旋轉中心到錨尾端中心點的距離。
2.1.3 拔出、旋轉和嵌入的判定條件
深水錨在任意時刻發生拔出、旋轉還是嵌入,仍采用最小力準則判定。若min(Tp)、min(Tk)、min(Td)其中一個力小于另外兩個,則發生較小力對應的行為。以圖7(a)為例,若min(Tp)
2.2深水錨復雜動力行為的分析流程
深水錨復雜動力行為的計算流程如下:
1)給定初值,包括初始狀態下深水錨的位置z、方位角θo、拖曳力與錨板上表面的夾角θa。
2)最小力第一層含義的應用:在當前條件下,假設發生拔出或嵌入,計算所需的拖曳力min(Tp)、min(Td)及對應的運動方向;假設發生旋轉,計算所需的旋轉拖曳力min(Tk)、旋轉中心位置。
3)最小力第二層含義的應用:比較拔出或嵌入所需拖曳力min(Tp)、min(Td)和旋轉所需拖曳力min(Tk)的大小,根據圖7所示的各力大小相對關系,判斷錨的運動行為。
4)根據步驟3)所判定的行為,給定對應的角度和位移增量;同時根據纜繩方程,即方程(9),更新系纜點處拖曳力與水平面的夾角θah。
5)重復步驟2)~4),直至滿足結束條件,即錨板抬平或達到極限嵌入深度。

圖7 拔出、旋轉和嵌入行為的組合Fig. 7 Combination of pulling out, keying and diving
3 模型驗證
為檢驗本文所提出分析模型的合理性,本節將其應用于預測拖曳錨在海床中的嵌入運動軌跡,并與已有分析方法和離心機試驗結果進行對比。
3.1與已有分析方法比較
Murff等[16]于2005年公布了一項對于某簡化典型拖曳錨的軌跡研究結果,該研究包含5家研究機構或個人的工作成果,隨后,Liu等[17]也對此典型錨做了軌跡預測。不同研究者采用的研究方法差別較大,但所預測軌跡的總體趨勢相似。其中,預測者1、2、4、5采用極限平衡法,預測者3采用塑性上限分析法,Liu等[17]從運動學入手,采用理論解析方法進行求解。
算例1中所采用的拖曳錨如圖8所示,錨的參數見表4,模型計算所需參數見表5。其中,Zued為拖曳錨的極限嵌入深度;b為有效纜繩寬度,b=En·d。拖纜為鋼纜,根據DNV[12]的建議,μ的取值在0.1~0.3之間,取平均值0.2。Murff等[16]給出α的取值范圍為0.3~0.5。NclNcf的取值沒有明確給出,因其直接影響拖曳軌跡的預測,因此有必要對其進行討論。鑒于對錨和纜繩的端阻力系數認識有限,本文借鑒以往研究者的做法[10,18],對Ncl和Ncf的取值不作區分,取Nc=Ncl=Ncf。對于深埋條形錨板,Rowe[19]建議Ncf取10.28~11.42。在理論計算拖曳錨所受土抗力時,Neubecker等[3]取Ncf=9。對于表面粗糙的深埋平板,Merifield[20]建議Ncf取11.16~11.86。對于深嵌矩形錨板,O’Neill等[8]建議Ncf取11.87。Elkhatib等[21]認為,深埋錨板的Ncf值與錨板的寬厚比相關,建議取值范圍為9.1~11.7。Thorne[4]和Ruinen[22]在研究拖曳錨的嵌入軌跡時,直接采用Skempton[7]的建議值,即Ncf=7.6。綜上,Nc的建議取值范圍為7.6~11.87。需要說明的是,Liu等[17]所提出的解析解中所需參數θa通過Zhang等[11]的方法求得。計算求得θa=58.7°。
對本文分析模型進行的參數考察結果顯示,對拖曳錨而言,極限嵌入深度隨Nc的減小而增大,隨α的增大而增大,這與之前研究者的結論一致[18]。因此,對于算例1,本文分析模型極限嵌入深度的上限在Nc=7.6,α=0.5時取得;下限在Nc=11.87,α=0.3時取得。對比結果如圖9所示。
可以看出,本文的預測結果與6位預測者的預測結果總體趨勢一致,即嵌入深度隨拖曳距離增加逐漸增大,并最終到達一個極限值。同時,本文預測的軌跡在6位其它預測者曲線范圍之間。由此驗證了本文所提出分析模型的合理性和有效性。

表4 算例1錨參數表Tab. 4 Anchor parameters for case 1

表5 算例1對比工況表Tab. 5 Parameters for case 1
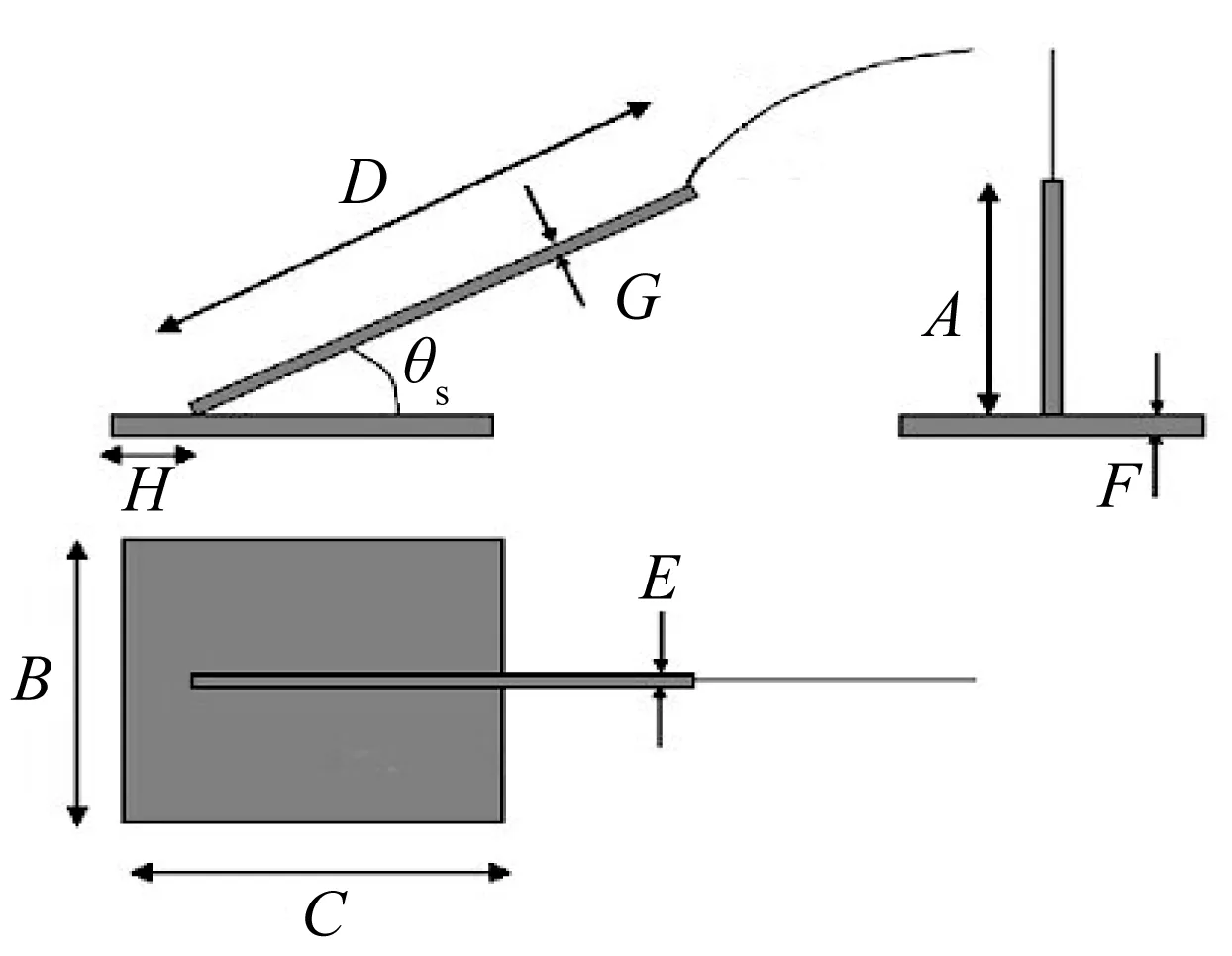
圖8 算例1錨板示意Fig. 8 Schematic of the anchor for case 1
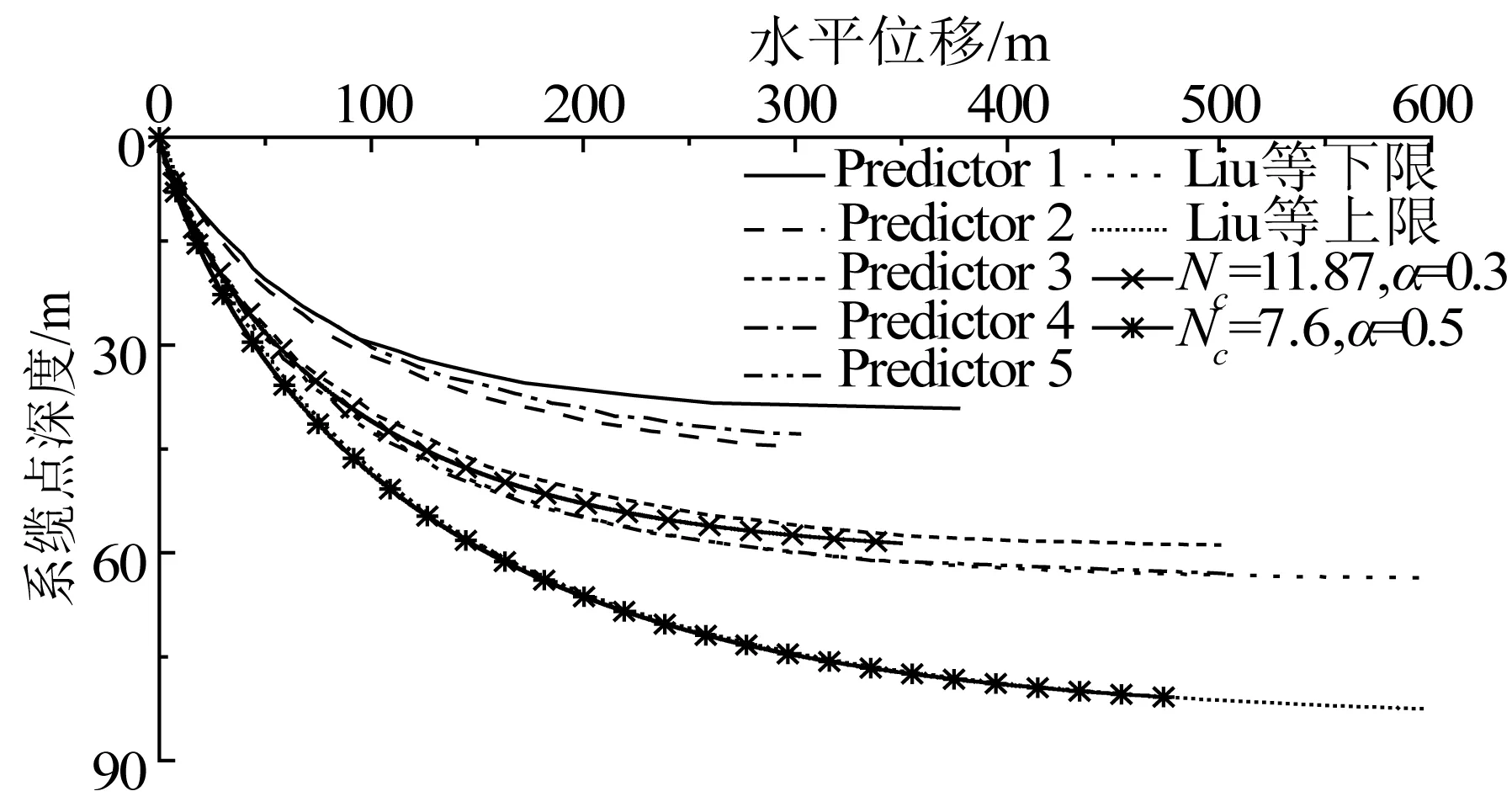
圖9 算例1運動軌跡對比Fig. 9 Comparison of the anchor trajectory for case 1
3.2與鼓式離心機試驗比較
O’Neill等[23]于2001年采用鼓式離心機試驗研究Vryhof Stevpris錨的運動軌跡,本節將分析模型的預測結果與該試驗數據進行對比。鼓式離心機試驗所用拖曳錨的比尺為1∶160,原型錨自重為32 t,錨脛角分別為32°和50°,錨的楔形角θm為9.7°。模型錨主體尺寸如圖10所示。試驗所用土體為正常固結黏土,計算所需參數如表6所示。
試驗采用特殊設計的加載剛臂控制系纜點坐標,控制方程采用纜繩方程(9)的簡化形式:
在算例2中,錨的所有參數和土體參數均已知,但黏滯系數α沒有給出。根據Murff等[16]在數值預測拖曳錨在黏土中的運動軌跡時的建議,α取0.3~0.5。為達到預測效果,α分別取0.3和0.5進行對比。
該研究還采用數值增量迭代方法[3]對錨的嵌入行為進行了描述。歸一化后的軌跡對比結果如圖11所示。
可以看出,運用分析模型預測的拖曳軌跡與試驗結果和增量數值模擬結果吻合很好。在對α的考察結果中顯示,α=0.3使得分析模型的預測結果與試驗結果更為接近。

圖10 算例2模型錨主體尺寸圖Fig.10 Dimensions of the anchor models for case 2
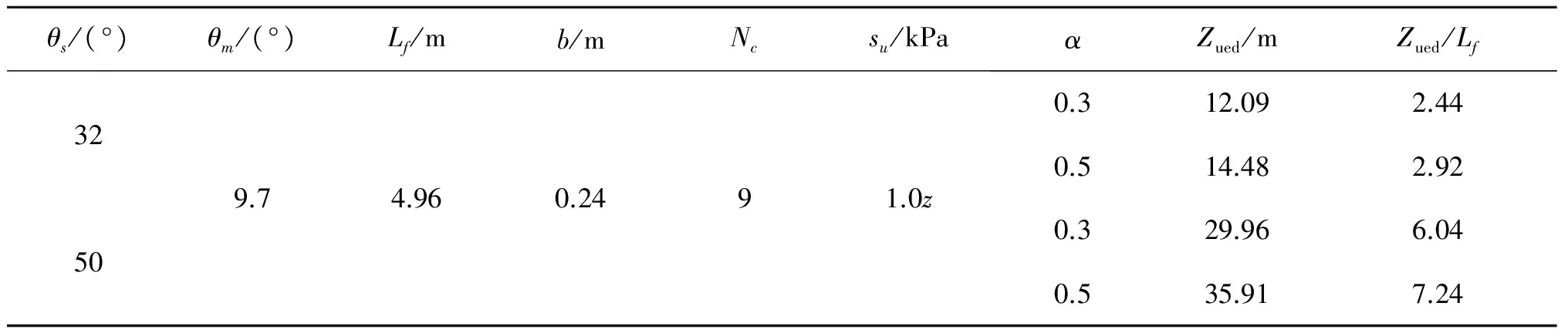
θs/(°)θm/(°)Lf/mb/mNcsu/kPaαZued/mZued/Lf32509.74.960.2491.0z0.312.092.440.514.482.920.329.966.040.535.917.24

圖11 算例2運動軌跡對比圖Fig. 11 Comparisons of the anchor trajectories for case 2
4 結 語
1)將深水錨的復雜動力行為分解為拔出、旋轉和嵌入,分別給出了明確定義并建立了力學模型。
2)提出最小力準則用于確定錨的拔出、嵌入方向和旋轉中心,該準則同時可作為拔出、旋轉、嵌入行為是否發生的判定條件。給定分析流程,建立起描述深水錨在海床中復雜動力行為的分析模型。
3)為驗證本文提出的分析模型,將其應用于預測拖曳錨的嵌入運動軌跡,預測結果與已有分析方法和離心機試驗結果均有較好的吻合,表明了該分析模型的合理性和有效性。
4)該分析模型囊括了已有深水錨在海床中的綜合動力行為。將該模型應用于深水錨更為復雜的動力行為,如重力貫入錨在安裝過程、系泊狀態尤其在極端環境下的行為預測,將是今后工作的重點。
[1] ZIMMERMAN E H, SMITH M W, SHELTON J T. Efficient gravity installed anchor for deepwater mooring[C]//Proceedings of the 41st Annual Offshore Technology Conference. 2009:OTC20117.
[2] STEWART W P. Drag embedment anchor performance prediction in soft soils[C]//Proceedings of the 24th Annual Offshore Technology Conference. 1992:241-248.
[3] NEUBECKER S R, RANDOLPH M F. Performance of drag anchor and chain systems in cohesive soil[J]. Marine Georesources and Geotechnology, 1996, 14:77-96.
[4] THORNE C P. Penetration and load capacity of marine drag anchors in soft clay[J]. Journal of Geotechnical and Geoenvironmental Engineering, 1998, 124:945-953.
[5] AUBENY C P, CHI C. Mechanics of drag embedment anchors in a soft seabed[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2010, 136:57-68.
[6] CASSIDY M J, GAUDIN C, RANDOLPH M F, et al. A plasticity model to assess the keying of plate anchors[J]. Geotechnique, 2012, 62:825-836.
[7] SKEMPTON A W. The bearing capacity of clays[C]//Proceedings of the Building Research Congress. 1951:180-189 .
[8] O’NEILL M P, BRANSBY M F, RANDOLPH M F. Drag anchor fluke-soil interaction in clays[J]. Canadian Geotechnical Journal, 2003, 40:78-94.
[9] REESE L C. A design method for an anchor pile in a mooring system[C]//Proceedings of the 5th Annual Offshore Technology Conference. 1973:OTC1745.
[10] NEUBECKER S R, RANDOLPH M F. Profile and frictional capacity of embedded anchor chains[J]. Journal of Geotechnical Engineering, 1995, 121:797-803.
[11] ZHANG W, LIU H X, ZHAO Y B, et al. Interactional properties between drag anchor and installation line[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2014, 140:04013018.
[12] DNV, Design and installation of fluke anchors in clay[S]. 2000.
[13] DEGENKAMP G, DUTTA A. Soil resistances to embedded anchor chain in soft clay[J]. Journal of Geotechnical Engineering, 1989, 115:1420-1438.
[14] LIU H X, ZHANG W, LIU C L, et al. Movement direction of drag anchors in seabed soils[J]. Applied Ocean Research, 2012, 34:78-95.
[15] LIU H X, WANG C, ZHAO Y B. Analytical study of the failure mode and pullout capacity of suction anchors in clay[J]. Ocean Systems Engineering, 2013, 3:79-95.
[16] MURFF J D, RANDOLPH M F, ELKHATIB S, et al. Vertically loaded plate anchors for deepwater applications[C]//Proceedings of International Symposium on Frontiers in Offshore Geotechnics. 2005:31-48.
[17] LIU H X, LIU C L, ZHAO Y B, et al. Reverse catenary equation of the embedded installation line and application to the kinematic model for drag anchors[J]. Applied Ocean Research, 2013, 43:80-87.
[18] LIU H X, LI Y, YANG H T, et al. Analytical study on the ultimate embedment depth of drag anchors[J]. Ocean Engineering, 2010, 37:1292-1306.
[19] ROWE R K. Soil structure interaction analysis and its application to the prediction of anchor behavior[D]. Australia:University of Sydney, 1978.
[20] MERIFIELD R S, SLOAN S W, YU H S. Stability of plate anchors in undrained clay[J]. Geotechnique, 2001, 51:141-154.
[21] ELKHATIB S, RANDOLPH M F. The effect of interface friction on the performance of drag-in plate anchors[C]//Proceedings of International Symposiumon Frontiers in Offshore Geotechnics. 2005:171-177.
[22] RUINEN R M. Penetration analysis of drag embedment anchors in soft clays[C]//Proceedings of International Offshore and Polar Engineering Conference. 2004:531-537.
[23] O’NEILL M P, RANDOLPH M F. Modelling drag anchors in a drum centrifuge[J]. International Journal of Physical Modeling in Geotechnics, 2001, 2:29-41.
An analytical model of comprehensive kinematic behaviors of deepwater anchors in the seabed
SONG Haijuan, LIU Haixiao, ZHAO Yanbing
(School of Civil Engineering, Tianjin University, Tianjin 300072, China)
Deepwater anchor is the core component of deepwater mooring system. With the development of new concepts and technologies in the field of deepwater mooring, the kinematic behavior of deepwater anchors in the seabed becomes more complicated, which brings great challenges to the published analytical methods. The comprehensive kinematic behavior of deepwater anchors is herein regarded as the combination of well-defined Pulling out, Keying and Diving, whose mechanical models are developed respectively. The “Minimum force principle” is proposed not only to determine the directions of pulling out and diving and the center of rotation, but also to serve as the criteria for whether Pulling out, Keying and Diving will occur. Thus an analytical model is established to describe the comprehensive kinematic behavior of deepwater anchors in the seabed. By applying the analytical model to predict the kinematic trajectory of drag anchors in the seabed and comparing the results with the published analytical methods and centrifuge test data, the validity of the analytical model is verified.
deepwater anchor; kinematic behavior; analytical model; kinematic trajectory; seabed
P751
A
10.16483/j.issn.1005-9865.2015.06.005
劉海笑,男,博士生導師,主要從事深水系泊技術和海洋巖土工程方面的研究。E-mail: liuhx@tju.edu.cn
1005-9865(2015)06-035-10
2014-10-21
天津市應用基礎與前沿技術研究計劃重點項目(14JCZDJC39900);國家自然科學基金資助項目(51179124)
宋海娟(1990-),女,山東濰坊人,碩士生,從事海洋工程系泊基礎方面的理論研究。E-mail: song_hai_juan@163.com
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
