機器人末端位移傳感器的安裝位置標定方法
2015-10-24 01:08:56袁康正朱偉東戚文剛
浙江大學學報(工學版) 2015年5期
關鍵詞:測量
袁康正,朱偉東,陳 磊,薛 雷,戚文剛
(1.浙江大學機械工程學系,浙江杭州310027;2.上海飛機制造有限公司,上海200436)
機器人末端位移傳感器的安裝位置標定方法
袁康正1,朱偉東1,陳 磊2,薛 雷2,戚文剛2
(1.浙江大學機械工程學系,浙江杭州310027;2.上海飛機制造有限公司,上海200436)
針對機器人末端激光位移傳感器位置的標定問題,基于平面和球面模板擬合的標定模型,設計一種同時標定位移傳感器方向和位置參數的標定方法.以機器人離線編程與機器人運動學仿真為基礎,對2種標定算法進行系統的仿真對比實驗.分析影響2種標定模板標定精度的影響因素,如傳感器測量誤差、測量長度以及標定參數數量.引入可觀測指數來評價機器人運動空間中測量姿態的標定效率.通過優化算法計算得出一組近似最優測量姿態以及最佳評價指數,減少非建模誤差以及測量誤差對標定結果的影響,有效地提高算法的抵抗噪聲能力、標定精度以及標定效率.實驗結果表明,使用該標定方法標定后的位置參數標準差為0.37 mm,方向參數標準差為0.35°.
機器人TCP標定;激光位移傳感器;最小二乘法;可觀測指數
將激光位移傳感器、激光掃描儀、照相機等非接觸式測量設備安裝于機器人末端法蘭盤上,構成對環境具有一定感知功能的智能機器人是機器人的主要發展趨勢[1].對于在法蘭上裝有傳感器設備的機器人,傳感器相對于法蘭盤的位置和方向需要事先標定,這一過程稱為機器人刀尖點標定(tool center point,TCP)[2].另外,隨著機器人仿真和離線編程技術在工業中的應用日益增加[3],為了更加有效地使用機器人離線編程,需要進行準確的機器人標定和機器人TCP標定.
國內外對機器人TCP標定問題的研究已經取得較大進展,但主要是用于解決機器人與工業相機、3D掃描儀之間的標定問題.Shiu等[4]通過四元代數法和線性最小二乘法來分步求解相機位姿的旋轉矩陣和平移矩陣.Li等[5-6]以標準球作為標定對象,并通過機器人的平移運動和旋轉運動分步求解掃描儀與機器人之間的旋轉和平移矩陣.而針對機器人末端執行器夾持激光位移傳感器的TCP標定問題,目前采取的方法主要是通過求解機器人在特定幾何約束(點、線、面)下的閉環運動鏈方程[2].王勝華等[1]采用多次改變機器人位姿對同一點進行測量,利用運動學方程和最小二乘原理求出機器人末端坐標系與傳感器坐標系之間的齊次變換矩陣.此標定方法很難保證每次測量點都在同一點上,且標定結果受實驗環境、實驗操作影響較大.吳聊等[7]采用基于平面模板的標定方法,在不同位姿下對平面進行測量,利用非線性最小二乘法擬合平面求解標定問題.該方法雖然能夠快速標定出結果,但是參數分布對結果影響較大,因此標定精度受實驗操作影響.Zhu等[8]提出了基于球面擬合的標定算法,標定精度較高.但該方法首先需要機器人視覺伺服控制系統輔助標定位移傳感器方向參數,不具有通用性.Awei等[9]通過設計圓柱面和錐面復合標定對象,提出了一種串聯坐標測量機標定以及TCP標定新算法.盧科青等[10]通過設計一種方向可調的標定面,在三坐標測量機平臺上對點激光測頭激光束方向進行了標定.這2種方法雖然能滿足標定精度的要求,但標定過程往往需要將位移傳感器的方向和位置參數分步標定,標定過程較為繁瑣,而且需要復雜的標定對象或者精密的輔助測量設備,標定成本高.同時,在位移傳感器標定過程中,機器人的測量姿態和測量條件對標定結果的影響很大,而國內外學者在姿態選擇問題上研究較少,使得標定算法的移植性較差.
為了實現TCP標定算法的快速性和通用性,本文在非線性最小二乘優化算法的基礎上,建立了基于平面和球面擬合的標定理論模型,對位移傳感器的方向和位置參數進行同時標定,簡化了標定步驟.通過引入可觀測指數和優化算法得出最優測量姿態以及最佳評價指數,提高了算法的抗干擾能力、標定精度和標定效率.
1 標定數學模型
1.1 平面標定模型


圖1 平面標定模型Fig.1 Calibration model based on plane
測量點在法蘭坐標系XtYtZtOt下的坐標x可以表示為

式中:x=[x,y,z]T,x0=[x0,y0,z0]T,n=[nx,ny,nz]T.
測量點在機器人base坐標系下的坐標為pw(xw,yw,zw).由法蘭盤和機器人base坐標系之間齊次變換關系可得

由于測量點在固定板平面上,因此pw滿足平面方程:

聯立方程(2)、(3)可得位移傳感器測量點到平面的距離為

操作機器人到不同的位姿進行測量,獲取m組測量結果,可得di=fi(x0,y0,z0,α,β,a,b,c)(i=1,2,….,m),其中(cosα=nx,cosβ=ny).即可以通過非線性最小二乘法求解待標定參數,問題轉化為求解如下最小二乘問題:

1.2 球面標定模型
與平面擬合標定模型相似,球面擬合標定模型如圖2所示.測量點pw(xw,yw,zw)在已知半徑R的固定球面上,滿足空間球面方程:
聯立方程(2)、(6)可得到測量點到球心pc(xc,yc, zc)的距離為


圖2 球面標定模型Fig.2 Calibration model based on sphere
通過控制機器人使激光位移傳感器在不同姿態下測量球面上m個點,可以得到m個形式如式(7)的等式.則位移傳感器標定問題即為求解非線性最小二乘問題:

2 仿真分析
針對建立的平面和球面標定模型,在三維設計軟件CATIA中建立相應的三維模型并在擬合面上選取若干個離散測量點.通過離線編程前置處理軟件提取測量點信息并導入到DELMIA軟件中的離線編程模塊進行機器人測量仿真,獲取機器人法蘭位姿矩陣T以及測量長度l數據,仿真實驗平臺如圖3所示.在測量值l上添加均勻分布噪聲來近似模擬機器人運動誤差、傳感器測量誤差、擬合面誤差等因素對測量值的影響.最后,非線性最小二乘問題可通過數值分析軟件MATLAB中Levenberg-Marquardt算法求解[11].
2.1 2種標定算法標定結果對比
分別在l上添加隨機測量誤差±Δε,對2種標定算法進行多次優化實驗.2種標定算法標定的傳感器參考點位置絕對誤差Δd和激光束方向角度絕對誤差Δθ與Δε的關系如圖4(a)和(b)所示.

圖3 仿真分析實驗平臺Fig.3 Experimental platform for simulation analysis
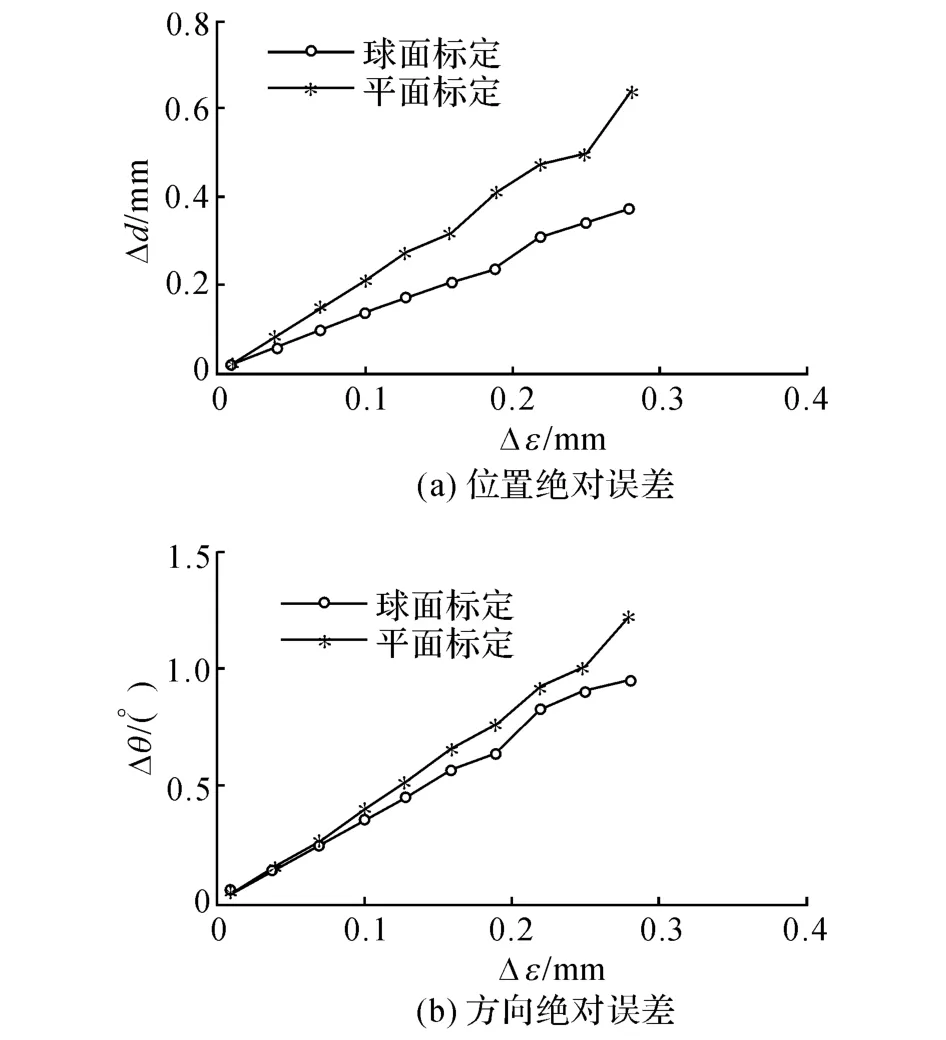
圖4 不同噪聲情況下2種標定算法的標定結果對比Fig.4 Comparison of calibration results of two calibration algorithms with varied noise
在Δε=±0.2 mm的噪聲等級下,分別對平面和球面標定算法隨機進行2 000次優化計算,位置絕對誤差Δd和方向角度絕對誤差Δθ的直方圖如圖5所示,其中f為頻率數.從仿真結果圖4和5可知,球面算法與平面算法相比,球面算法的標定精度高、收斂性好,且誤差越大效果越明顯.
2.2 參數影響仿真分析
測量長度:針對球面標定算法,分析了位移傳感器測量值分布情況對標定結果的影響.在傳感器測量位置、方向相同,噪聲大小相同,測量長度l均值ˉl分別為20、40、60、80、100 mm條件下進行優化計算.5種情況下的標定結果如圖6所示.

圖5 2種算法的優化結果Fig.5 Optimization results of two calibration algorlthms
標定參數個數:針對球面標定算法,位移傳感器需標定的參數個數n對位置標定精度影響較大.在所有參數都未知的情況下,此時標定參數個數n=8(傳感器位置、方向、球心位置).若球心在機器人base下坐標已知,則需要標定參數個數n=5.若傳感器方向參數事先通過其他方法標定,此時需要標定參數個數n=6.在不同標定參數個數下,球面算法的位置標定誤差和噪聲誤差的關系如圖7所示.

圖6 不同測量長度下的標定誤差Fig.6 Calibration errors with different measuring distances
2.3 姿態仿真優化
針對圖2球面標定理論模型,可得

式中:ω為待標定參數(x,y,z,α,β,xc,yc,zc),ε為傳感器測量誤差、機器人運動誤差等引起的測量點到球心距離誤差.將上式對T進行微分可得

式中:ΔF為函數誤差,J為雅克比辨識矩陣,ΔT為機器人姿態矩陣誤差,對J進行奇異值分解可得

圖7 參數個數對標定誤差的影響Fig.7 Influence of the number of optimized parameters on calibration error

式中:U、V為正交矩陣,Σ為對角矩陣,對角元素為σi(i=1,…,m),其中σ1≥σ2…≥σm≥0.

可觀測指數[12]基于雅克比辨識矩陣的奇異值分解,量化在特定位姿下參數辨識的可觀測性.指數數值越大,則位置誤差對于參數誤差的貢獻越大,即未建模誤差和測量誤差的影響越小[13].
5種可觀測指數定義如下:

最優姿態優化算法流程如下:
1)在機器人測量運動空間內隨機選取足夠多的N組測量姿態作為候選姿態.
2)在候選姿態中選取n(n<N)組姿態作為初始標定姿態集合,用Ω表示.
3)從余下的(N-n)組候選姿態中,選取一個姿態ξ+增加到Ω,使得增加后的標定姿態Ω+1的可觀測指數與Ω相比增加最大.
4)從Ω+1中去掉一個姿態ξ-,使得去掉后的標定姿態Ω可觀測指數減小最少.
5)重復步驟3和4直到ξ+與ξ-相等.
由仿真模型獲取N=2 000組候選姿態,分別應用5種可觀測指數對候選姿態進行優化計算.5種可觀測指數優化前后對比如圖8所示.

圖8 5種可觀測指數優化結果Fig.8 Optimization results of five OIs
2.4 仿真結論
由仿真實驗結果可以得出以下結論:球面標定算法比平面算法收斂性好,且標定精度高.在實驗條件允許情況下,方向參數通過輔助設備單獨標定,能夠有效地提高球面算法的標定精度,而球心坐標參數在已知的情況下對傳感器位置標定精度的提高不大.在測量姿態相同的情況下,傳感器的測距越小位置參數標定精度越高.5種可觀測指數優化姿態在一定程度上均能提高球面標定算法的穩定性和精度,其中O5指數優化效果最好.
3 機器人制孔系統測量實驗

圖9 實驗平臺Fig.9 Experiment platform
為了檢驗球面標定算法的有效性,進行了基于球面擬合的位移傳感器標定實驗,實驗平臺如圖9所示.實驗中采用KUKA KR360-2型號六自由度機器人,重復定位精度±0.08 mm.機器人法蘭末端執行器上安裝由Baumer公司生產的ch-8501型號激光位移傳感器,最大測距120 mm,分辨率0.01 mm,線性誤差0.08 mm.固定的標定球采用直徑為30 mm的標準球,其球面圓度0.08μm.
通過改變機器人姿態使激光位移傳感器對標定球面進行30次測量,并記錄相關數據.將待標定參數的粗略測量值作為迭代計算的初始值,通過Matlab優化工具箱中lsqnonlin函數,求解球面標定模型中的非線性最小二乘問題.采用球面算法求解參數的優化結果如表1所示.位移傳感器位置參數標準差為0.37 mm,接近傳統視覺測量方法標定精度(標準差為0.2 mm)[8].

表1 基于球面標定模型激光位移傳感器標定結果Tab.1 Calibration results of laser displacement sensor with calibration model based on sphere
4 結 語
本文詳細分析了基于平面和球面擬合的位移傳感器標定理論模型,并通過仿真分析對比得出球面模板方法在收斂性和標定精度上要優于平面模板方法.為了避免使用額外的附加測量設備,本文同時標定位移傳感器方向和位置參數,簡化了標定流程.為了減小傳感器測量誤差和測量姿態對球面標定算法的精度、穩定性和標定效率的影響,本文引入了可觀測指數對標定姿態進行評價,進而獲得最優姿態.實驗結果顯示,采用本文的標定方法,激光位移傳感器的標定結果位置參數最大標準差為0.37 mm,方向參數最大標準差0.35°,接近傳統視覺測量方法標定精度.
(References):
[1]王勝華,都東,張文增,等.機器人定點變位姿手-眼標定方法[J].清華大學學報:自然科學版,2007,47(2):165-168.
WANG Sheng-hua,DU Dong,ZHANG Wen-zeng,et al.Hand-eye calibration for the robot by measuring a fixed point from different poses[J].Journal of Tsinghua University:Science and Technology,2007,47(2):165-168.
[2]GAN Z,TANG Q.Visual sensing and its applications: integration of laser sensors to industrial robots[M].Hangzhou:Zhejiang University Press,2011.
[3]MITSI S,BOUZAKIS K D,MANSOUR G,et al.Offline programming of an industrial robot for manufacturing[J].The International Journal of Advanced Manufacturing Technology,2005,26(3):262-267.
[4]SHIU Y C,AHMAD S.Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX=XB[J].Robotics and Automation,IEEE Transactions on,1989,5(1):16-29.
[5]LI J,ZHU J,DUAN K,et al.Calibration of a portable laser 3-D scanner used by a robot and its use in measurement[J].Optical Engineering,2008,47(1):017202-017202-8.
[6]REN Y J,YIN S B,ZHU J G.Calibration technology in application of robot-laser scanning system[J].Optical Engineering,2012,51(11):114204-114204.
[7]吳聊,楊向東,藍善清,等.基于平面模板的機器人TCF標定[J].機器人,2012,34(1):98-103.
WU Liao,YANG Xiang-dong,LAN Shan-qing,et al.Robotic TCF calibration based on a planar template[J].Robot,2012,34(1):98-103.
[8]ZHU Z,TANG Q,LI J,et al.Calibration of laser displacement sensor used by industrial robots[J].Optical Engineering,2004,43(1):12-13.
[9]ZHOU A,GUO J,SHAO W,et al.A segmental calibration method for a miniature serial-link coordinate measuring machine using a compound calibration artefact[J].Measurement Science and Technology,2013,24(6):065001.
[10]盧科青,王文,陳子辰.點激光測頭激光束方向標定[J].光學精密工程,2010,18(4):880-886.
LU Ke-qing,WANG Wen,CHEN Zi-chen.Calibration of laser beam-direction for point laser sensors[J].Optics and Precision Engineering,2010,18(4):880-886.
[11]陳淑銘,喬田田.一個求解非線性最小二乘問題的新方法[J].煙臺大學學報:自然科學與工程版,2004,01:14 -22.
CHEN Shu-ming,QIAO Tian-tian.A new method of solving problem of nonlinear least square[J].Journal of Yantai University:Natural Science and Engineering Edition,2004,17(1):14-22.
[12]SUN Y,HOLLERBACH J M.Observability index selection for robot calibration[C]//IEEE International Conference on Robotics and Automation.Pasadena:IEEE,2008:831-836.
[13]JOUBAIR A,BONEV I A.Comparison of the efficiency of five observability indices for robot calibration[J].Mechanism and Machine Theory,2013,70:254-265.
Approach for calibrating position of displacement sensor mounted on robot end-effector
YUAN Kang-zheng1,ZHU Wei-dong1,CHEN Lei2,XUE Lei2,QI Wen-gang2
(1.Department of Mechanical Engineering,Zhejiang University,Hangzhou 310027,China;2.Shanghai Aircraft Manufacturing Limited Company,Shanghai 200436,China)
In order to calibrate the position and orientation of laser displacement sensors mounted on a robot,an approach was devised for calibrating the position and orientation parameters simultaneously,based on the model of plane and sphere fitting.A contrast experiment was proposed and conducted systematically based on robot off-line programming and robot kinematics simulation.Effects on the accuracy of the two calibration algorithm were also analyzed such as the measurement error,length of sensor and the number of calibration parameters.Observability indices were introduced to evaluate the efficiency of parameter identification with the measurement configurations in robot motion space.Optimal measurement configurations and best evaluation index were calculated using on optimization algorithm.The effects of the nonmodeling error and measurement error are reduced.The stability,accuracy and efficiency of the algorithm are improved.Experiment results of our improved calibration algorithm indicate that the standard deviation of position is 0.37 mm,the standard deviation of orientation is 0.35°.
robot TCP calibration;laser displacement sensor;least square method;observability index
10.3785/j.issn.1008-973X.2015.05.003
TP 242
A
1008-973X(2015)05-0829-06
2014-05-20. 浙江大學學報(工學版)網址:www.journals.zju.edu.cn/eng
國家自然科學基金資助項目(51205352).
袁康正(1990-),男,碩士,從事機器人精密制孔、視覺測量等研究.E-mail:441090246@163.com.
朱偉東,男,副教授.E-mail:wdzhu@zju.edu.cn.
下期論文摘要預登
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00