一種魚雷主動聲自導目標檢測真實性判定方法
2015-10-24 05:45:48熊乾坤唐世軒
水下無人系統(tǒng)學報 2015年2期
熊乾坤,唐世軒
(中國人民解放軍第91388部隊,廣東 湛江,524022)
一種魚雷主動聲自導目標檢測真實性判定方法
熊乾坤,唐世軒
(中國人民解放軍第91388部隊,廣東 湛江,524022)
針對魚雷主動聲自導檢測目標不穩(wěn)定問題,提出了一種量化的目標檢測真實性判定方法。該方法根據(jù)魚雷檢測目標點的距離、方位等有關(guān)航行參數(shù),采用坐標反算方法計算其在魚雷內(nèi)測坐標系中坐標,對目標點位置進行坐標轉(zhuǎn)換,在同一平面直角坐標系中計算魚雷檢測目標點與實際目標點的距離,并據(jù)此判定魚雷主動聲自導檢測目標的真實性。文中采用Python程序設(shè)計語言實現(xiàn)了該算法,算例驗證了該方法簡單有效,具有可行性。關(guān)鍵詞:魚雷; 主動聲自導; 真實性判定; 坐標反算
0 引言
在魚雷實航試驗數(shù)據(jù)判讀時,對魚雷檢測到的目標點進行科學分析,確定魚雷檢測目標點是否是真實目標,這是試驗數(shù)據(jù)處理人員需要解決的重要問題。此前試驗數(shù)據(jù)處理一般采用將魚雷和目標航跡經(jīng)坐標轉(zhuǎn)換,繪制出試驗實施的綜合態(tài)勢圖,計算實際雷目距離和相對方位,并與魚雷檢測結(jié)果直接比較,根據(jù)經(jīng)驗分析魚雷檢測結(jié)果的真實性,無量化判據(jù)。文中根據(jù)魚雷檢測到的目標距離、方位、魚雷當前坐標及姿態(tài)等有關(guān)航行參數(shù),采用坐標反算方法計算出魚雷檢測目標點在魚雷內(nèi)測坐標系中的坐標,并計算魚雷檢測目標點與實際目標點的距離,可在將原點平移至魚雷發(fā)射點的高斯平面坐標系中魚雷、目標綜合態(tài)勢圖上標示出魚雷檢測目標點的位置,計算魚雷檢測目標點與實際目標點的距離,根據(jù)采集數(shù)據(jù)精度及誤差傳遞關(guān)系[1],分析該距離的允許范圍,并根據(jù)該距離大小,判定魚雷目標檢測結(jié)果是否虛警,是一種量化的判定方法。
1 魚雷主動聲自導檢測目標點坐標反算方法
1.1檢測目標點在魚雷內(nèi)測坐標系中的坐標
魚雷主動聲自導檢測目標點坐標反算的原理是: 魚雷發(fā)現(xiàn)目標時,魚雷坐標位置可由魚雷內(nèi)測記錄航行參數(shù)讀取,根據(jù)魚雷主動聲自導檢測到的目標距離和方位以及魚雷與目標之間的深度差,可以計算出目標與魚雷之間的水平距離,再根據(jù)魚雷航向角和主動聲自導檢測到的目標水平方位,可以計算出檢測目標點相對魚雷坐標點的幾何方位,從而可以在魚雷坐標點已知的情況下,計算出目標點的坐標。
每一型魚雷均有自己的內(nèi)測坐標系定義,不同的魚雷內(nèi)測坐標系定義不盡相同,某型魚雷內(nèi)測坐標系定義為: 以魚雷出管時刻位置為坐標原點,魚雷發(fā)射方向為縱軸x(向前為正),經(jīng)過坐標原點,在水平面內(nèi)與縱向垂直的方向為橫軸y(從雷尾往雷頭看向右為正),經(jīng)過發(fā)射點垂直向下為深度軸h (向下為正)。魚雷航向角定義為魚雷軸線在水平面的投影與縱軸的夾角為航向角αTX(范圍為-180°~+180°,發(fā)射方向為0°,向左為正)。魚雷縱傾角αTH定義為魚雷軸線與水平面的夾角(魚雷“抬頭”為正)。檢測到的目標數(shù)據(jù)包括目標距離L(以發(fā)射和接收時間差計算的聲傳播距離),目標水平方位αOH(目標在魚雷左側(cè)為正),目標垂直方位αOV(目標在魚雷上方為正)。為便于計算,定義內(nèi)測絕對坐標系,該坐標系坐標軸定義與魚雷內(nèi)測坐標系相同,區(qū)別在于角度定義與常用高斯平面坐標系相同,即以發(fā)射時魚雷縱向為0°,順時針方向旋轉(zhuǎn)一周角度增加到360°,正右方向為90°,正左方向為270°。
根據(jù)魚雷檢測到的目標距離L,魚雷深度zT與目標深度hO的差值,可算出目標水平距離,即

若魚雷或目標航行深度未知,也可以根據(jù)魚雷檢測到的目標距離L、目標垂直方位αOV、魚雷當前縱傾角αTH,計算出目標水平距離,即

考慮到實航試驗時目標航行深度一般已知且在魚雷攻擊過程中保持不變,魚雷航行深度可從魚雷內(nèi)測記錄數(shù)據(jù)讀取; 而受水聲傳播影響,魚雷檢測到的目標垂直方位一般不如深度傳感器測量的深度精確,應(yīng)優(yōu)先選用式(1)計算目標水平距離。
根據(jù)魚雷內(nèi)測坐標系中魚雷航向角αTX,可以得到在內(nèi)測絕對坐標系中魚雷航向角為

根據(jù)魚雷主動聲自導檢測目標點在內(nèi)測坐標系中的方位,可以計算出其在內(nèi)測絕對坐標系中的目標絕對水平方位為
根據(jù)目標水平距離LH,目標絕對水平方位α,魚雷當前內(nèi)測坐標(xT,yT),可以計算出檢測目標點在內(nèi)測絕對坐標系中的縱坐標

橫坐標

1.2魚雷內(nèi)測坐標到高斯平面坐標的轉(zhuǎn)換
根據(jù)文中魚雷內(nèi)測坐標系的定義,可以看出,該魚雷內(nèi)測坐標系實際上是將以發(fā)射點為原點的高斯平面坐標系進行了1個角度的旋轉(zhuǎn),這個角度即魚雷發(fā)射方向,也就是發(fā)射魚雷時潛艇艇艏向β,魚雷內(nèi)測坐標系與高斯平面坐標系的關(guān)系如圖1所示。
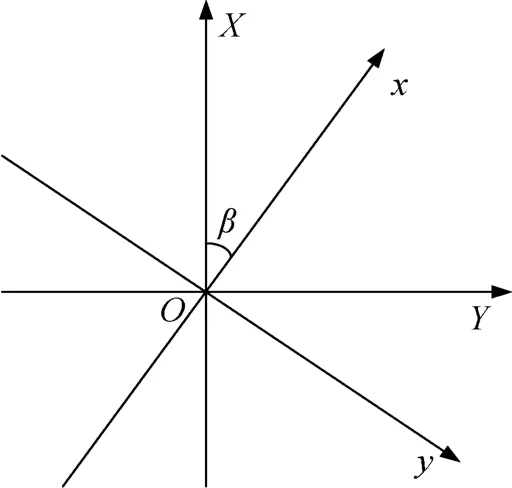
圖1 魚雷內(nèi)測坐標系與高斯平面坐標系關(guān)系示意圖Fig. 1 Schematic of the relationship between torpedo inner coordinate system and Gauss plane coordinate system
圖中,XOY為高斯平面坐標系,xOy為魚雷內(nèi)測坐標系,β為發(fā)射魚雷時潛艇艇艏向,其取值范圍為0°~360°。因此,內(nèi)測坐標系中點(x,y)轉(zhuǎn)換到以發(fā)射點為原點的高斯平面坐標系中的點(X,Y)的轉(zhuǎn)換公式為[2]


以上給出了根據(jù)魚雷檢測到的目標距離和方位計算魚雷檢測到的目標點相對發(fā)射點的高斯平面坐標,真實目標點相對發(fā)射點的高斯平面坐標可由目標經(jīng)緯度數(shù)據(jù)根據(jù)GJB6304-2008 2000中國大地測量系統(tǒng)轉(zhuǎn)換[3],并將原點平移到發(fā)射點得到。
真實目標的經(jīng)緯度數(shù)據(jù)可由目標導航系統(tǒng)給出,或在目標上加裝聲信標,由水聲測量設(shè)備測量得到。通過魚雷檢測到的目標點位置與目標點實際位置比較,計算這2點的直線距離,根據(jù)該距離是否在誤差允許范圍內(nèi),可以很方便地判斷魚雷檢測到的目標點是否是真實目標。
2 算法實現(xiàn)
2.1基于Python語言的算法實現(xiàn)
文中涉及數(shù)學計算相對簡單,不需使用功能強大的編程語言,采用Python程序設(shè)計語言即可實現(xiàn)。
Python 程序設(shè)計語言具有語法簡單、代碼規(guī)范、文檔完善、標準庫豐富、支持快速應(yīng)用開發(fā)等特點,可以投入較少的時間和精力完成軟件開發(fā)[4]。用Python編程實現(xiàn)文中提出的計算方法時,可定義以下3個函數(shù):
InnerCoord2Gauss(InnerCoordX,InnerCoordY,shootdirection);
RangeAzimuth2InnerCoord(distance,azimuth_Hor,depth_O,InnerCoords_T,attitude);
LatLon2Gauss(latitude,longitude)。
函數(shù)InnerCoord2Gauss將魚雷內(nèi)測坐標轉(zhuǎn)換成以發(fā)射點為原點的高斯平面坐標,輸入?yún)?shù)為魚雷縱坐標、魚雷橫坐標、魚雷發(fā)射方向; 輸出參數(shù)為相對北向坐標、相對東向坐標。
函數(shù)RangeAzimuth2InnerCoord(distance,azimuth_Hor,depth_O,InnerCoords_T,attitude),根據(jù)魚雷檢測到的目標距離、水平方位和目標航行深度、魚雷坐標,計算目標點在魚雷內(nèi)測坐標系中的坐標。輸入?yún)?shù)為目標距離、目標水平方位、目標航行深度、魚雷縱坐標、魚雷橫坐標、魚雷航行深度、魚雷航向角和魚雷縱傾角。輸出參數(shù)為目標縱坐標、目標橫坐標。
函數(shù)LatLon2Gauss(latitude,longitude)將經(jīng)緯度數(shù)據(jù)轉(zhuǎn)換成高斯平面坐標。輸入?yún)?shù)為緯度和經(jīng)度。輸出參數(shù)為北向坐標,東向坐標。經(jīng)度分帶可默認按照6度分帶處理。
2.2數(shù)據(jù)計算步驟及判定方法
假設(shè)1個主動聲自導檢測目標點的目標距離為L1,水平方位為1α,采用文中方法判定魚雷檢測到目標真實性的計算步驟如下。
步驟1: 查詢該自導檢測目標點相關(guān)數(shù)據(jù)。其中: 目標航行深度為hO1; 魚雷內(nèi)測坐標中縱坐標為x1、橫坐標為y1; 魚雷航行深度為hT1; 魚雷航向角為αTX1;魚雷縱傾角為αTH1。調(diào)用RangeAzimuth2InnerCoord函數(shù)計算得到檢測到的目標點在魚雷內(nèi)測坐標系中的坐標(縱坐標為x2,橫坐標為y2)。
步驟2: 查詢本條次發(fā)射魚雷方向為β1。調(diào)用InnerCoord2Gauss函數(shù)將魚雷檢測到的目標點在魚雷內(nèi)測坐標系中的坐標轉(zhuǎn)換為以發(fā)射點為原點的高斯平面坐標(北向坐標x3,東向坐標y3)。
步驟3: 根據(jù)試驗現(xiàn)場采集的數(shù)據(jù),發(fā)射魚雷時刻為北京時間t1,發(fā)射魚雷時刻潛艇經(jīng)緯度為lat1,lon1,調(diào)用LatLon2Gauss函數(shù)轉(zhuǎn)換得到發(fā)射魚雷時刻潛艇高斯平面坐標(北向坐標x4,東向坐標y4)。
步驟 4: 該檢測點對應(yīng)的北京時間為t1,根據(jù)某水聲測量系統(tǒng)提供的數(shù)據(jù),該時刻目標經(jīng)緯度為lat2,lon2,調(diào)用LatLon2Gauss函數(shù)轉(zhuǎn)換得到高斯平面坐標(北向坐標x5,東向坐標y5); 目標點轉(zhuǎn)換為以發(fā)射點為原點的高斯平面坐標(北向坐標x6,東向坐標y6)。
步驟5: 計算在以發(fā)射點為原點的高斯平面坐標系中,魚雷檢測目標點(x3,y3)與外測實際目標點(x6,y6)的距離R,根據(jù)水聲傳播及魚雷自導檢測原理以及外測方法對魚雷檢測目標點進行誤差分析,假設(shè)該誤差值為R0,若R≤R0,則判定魚雷檢測到的目標位置與目標實際位置相符,魚雷檢測到的目標為真實目標; 若R>R0,則判定魚雷檢測到的目標位置與目標實際位置不相符,魚雷自導檢測到的目標不是真實目標。
3 算例
3.1算例1
已知目標距離為976 m,水平方位為2.5°,目標的航行深度80 m,魚雷發(fā)射方向270.39°; 當前魚雷航行參數(shù)為: 內(nèi)測縱坐標4 308 m、橫坐標4 100 m,航行深度120 m,航向角為-115.906°,縱傾角-0.078°; 將發(fā)射點和當前目標點經(jīng)緯度轉(zhuǎn)換為高斯平面坐標,并計算出目標點相對于發(fā)射點的高斯平面坐標(北向坐標3 779 m,東向坐標-4 361 m); 判定該檢測點的真實性。
采用文中步驟1的方法,計算得出魚雷檢測目標點在魚雷內(nèi)測坐標系中的坐標(縱坐標3 921 m、橫坐標4 995 m); 采用步驟2中的方法將該點轉(zhuǎn)換為以發(fā)射點為原點的高斯平面坐標(北向坐標5 022 m、東向坐標-3 887 m)。
在以發(fā)射點為原點的高斯平面坐標系中比較魚雷檢測目標位置(北向坐標5 022 m、東向坐標-3 887 m)與目標實際位置(北向坐標3 779 m、東向坐標-4 361 m)兩點直線距離為1 330 m,認為魚雷檢測目標位置與目標實際位置明顯不符,本次魚雷檢測結(jié)果不是真實目標。
3.2算例2
已知目標距離807 m,水平方位0°,目標為水面艦,平均吃水5.3 m,魚雷發(fā)射方向83°; 當前魚雷航行有關(guān)參數(shù)為內(nèi)測縱坐標4 653 m、橫坐標-16 m,航行深度20.25 m,航向角0.781°,縱傾角-0.109°; 將發(fā)射點和當前目標點經(jīng)緯度轉(zhuǎn)換為高斯平面坐標,并計算出目標點相對于發(fā)射點的高斯平面坐標(北向坐標618 m,東向坐標5 393 m); 判定該檢測點的真實性。
采用文中步驟1的方法,計算得魚雷檢測目標點在魚雷內(nèi)測坐標系中坐標(縱坐標5 460 m、橫坐標-27 m); 采用步驟2的方法將該點轉(zhuǎn)換為以發(fā)射點為原點的高斯平面坐標(北向坐標692 m、東向坐標5 416 m)。
在以發(fā)射點為原點的坐標系中比較魚雷檢測目標位置(北向坐標692 m、東向坐標5 416 m)與目標實際位置(北向坐標618 m、東向坐標5 393 m)兩點平面直線距離為77 m,由于數(shù)據(jù)采集精度,聲線彎曲等因素造成自導檢測本身的不精確性等都會帶來結(jié)果的不精確,認為誤差在允許范圍內(nèi),魚雷檢測目標位置與目標實際位置相符,本次魚雷檢測結(jié)果為真實目標。
4 結(jié)束語
魚雷自導檢測目標真實性判定是進行數(shù)據(jù)分析評定的基礎(chǔ),文中提出的根據(jù)主動聲自導檢測到的目標距離方位、魚雷和目標的航行參數(shù)等,采用坐標反算方法計算出魚雷檢測到的目標點在魚雷內(nèi)測坐標系中的坐標,并將全部坐標數(shù)據(jù)轉(zhuǎn)換為以發(fā)射點為原點的高斯平面坐標,在同一平面直角坐標系中計算魚雷檢測目標點位置與實際目標點位置之間的距離,根據(jù)此距離是否在可能存在的誤差范圍內(nèi)來分析判定魚雷主動聲自導檢測目標真實性的方法,經(jīng)實際試驗數(shù)據(jù)處理工作應(yīng)用證明簡單有效,可指導后續(xù)試驗魚雷主動聲自導檢測目標真實性判定工作。
由于水聲信道本身存在的聲線彎曲、聲傳播起伏、多途效應(yīng)等等[5-6],造成魚雷自導檢測目標不精確,人工采集數(shù)據(jù)精度不高也會帶來一定的誤差,要進一步提高數(shù)據(jù)分析處理的精度,需要進一步分析研究,并采用相應(yīng)手段提高原始采集數(shù)據(jù)的精度。
魚雷主動聲自導檢測到的目標參數(shù)還有垂直方位、目標多普勒速度等,文中分析計算時未加以利用,實際工作中也可以根據(jù)試驗實施時的雷目態(tài)勢對這幾項數(shù)據(jù)進行分析,作為綜合判定的依據(jù)之一。目標檢測的允許誤差范圍是本方法的關(guān)鍵判據(jù),需要根據(jù)實際使用測量設(shè)備精度及試驗現(xiàn)場數(shù)據(jù)采集精度、聲線彎曲影響等諸多因素綜合分析,以確保結(jié)論的可信度。
[1]肖懷秋,劉洪波. 試驗數(shù)據(jù)處理與試驗設(shè)計方法[M]. 北京:化學工業(yè)出版社. 2013
[2]嫄趙樹. 線性代數(shù)[M]. 第4版. 北京: 中國人民大學出版社,2013.
[3]中國人民解放軍總裝備部. GJB6304-2008 2000中國大地測量系統(tǒng)[S]. 北京: 中國標準出版社,2008.
[4]Mark Lutz. Python學習手冊[M]. 第4版. 李軍,劉紅偉,譯.北京: 機械工業(yè)出版社,2011.
[5]周德善. 魚雷自導技術(shù)[M]. 北京: 國防工業(yè)出版社,2009.
[6]劉伯勝,雷家煜. 水聲學原理[M]. 第2版. 哈爾濱: 哈爾濱工程大學出版社,2010.
(責任編輯: 楊力軍)
A Facticity Judgment Method for Target Detection of Torpedo Active Acoustic Homing
XIONG Qian-kun,TANG Shi-xuan
(91388th,The People′s Liberation Army of China,Zhanjiang 524022,China)
To solve the instability problem in target detection of torpedo active acoustic homing,a quantitative facticity judgment method for target detection is put forward. In this method,according to the target parameters detected by a torpedo,such as the range and azimuth,inverse coordinate calculation is adopted to calculate target point in torpedo inner coordinate system,then the coordinate of the target point is transferred. The distance between detected target point and actual target point is calculated in the same rectangular coordinate system to judge the facticity of the target detected by torpedo active acoustic homing. This algorithm is implemented with the programming language Python,and two examples prove the feasibility of the proposed method.
torpedo; active acoustic homing; facticity judgment; inverse coordinate calculation
TJ630.34
A
1673-1948(2015)02-0104-04
2014-12-28;
2015-02-10.
熊乾坤(1984-),男,碩士,主要研究方向為水下裝備試驗總體技術(shù).
