基于KD樹的點云索引技術(shù)研究
2015-10-22 11:47:10王儒胡萍蔣俊豪
科技視界 2015年30期
王儒 胡萍 蔣俊豪
【摘 要】隨著計算機技術(shù)的進(jìn)步以及社會需求的不斷增加,激光雷達(dá)技術(shù)作為一種三維空間信息的實時獲取手段,正以日新月異的速度向前發(fā)展。激光雷達(dá)技術(shù)有效地拓寬了數(shù)據(jù)源范圍,改變了數(shù)據(jù)獲取模式,能夠快速獲取高分辨率數(shù)字表面模型。然而,點云數(shù)據(jù)的海量性一直是制約點云數(shù)據(jù)處理方法的重要因素,迫切需要尋找一種高效空間索引方法來管理海量點云數(shù)據(jù)。因此,研究點云數(shù)據(jù)的管理和處理方法,形成點云的數(shù)據(jù)處理理論顯得十分重要。本文利用kd-tree來管理點云數(shù)據(jù)的索引,實驗證明kd-tree能高效的管理海量點云數(shù)據(jù)。
【關(guān)鍵詞】點云;kd-tree;索引;激光雷達(dá)
0 引言
地球空間信息的快速獲取和智能化處理是當(dāng)前測繪領(lǐng)域的研究熱點,也是“數(shù)字地球”、“數(shù)字城市”急待解決的問題。21世紀(jì)測繪技術(shù)必將實現(xiàn)高精度化、高速化、高效率化和標(biāo)準(zhǔn)化,空間數(shù)據(jù)處理必將實現(xiàn)智能化[1]。激光雷達(dá)技術(shù)是近幾十年攝影測量與遙感領(lǐng)域最具有革命性的成就之一,是繼全球定位系統(tǒng)(GPS)發(fā)明以來在遙感測繪領(lǐng)域的又一座里程碑,同時,激光雷達(dá)也可自成體系,組成地面三維激光掃描儀[2]。激光雷達(dá)系統(tǒng)掃描獲得數(shù)以萬計的激光點,被形象地稱之為點云[3]。對于點云數(shù)據(jù)來講,高效的索引結(jié)構(gòu)還是其他數(shù)據(jù)處理的基礎(chǔ),例如點云濾波、點云精簡都依存于某種索引結(jié)構(gòu)。
本文針對激光雷達(dá)系統(tǒng)所獲取的點云數(shù)據(jù)在管理與檢索,提出了基于kd-tree的點云管理方案。并利用三維激光點云數(shù)據(jù)進(jìn)行實驗,結(jié)果表明基于kd-tree的點云管理能高效的管理海量點云數(shù)據(jù)。
1 KD 樹基本原理
采用KD 樹結(jié)構(gòu)分割散亂點云,能明顯加快搜索速度,為k 領(lǐng)域的建立打下堅實基礎(chǔ)。KD 樹是K-dimension tree 的縮寫,是對數(shù)據(jù)點在k 維空間(如二維( x,y),三維( x,y,z),k維(x,y,z,…))中劃分的一種數(shù)據(jù)結(jié)構(gòu),主要應(yīng)用于多維空間關(guān)鍵數(shù)據(jù)的搜索:主要有范圍搜索和最近鄰搜索。
2 基于KD樹建立點云鄰域
點云數(shù)據(jù)為散亂數(shù)據(jù)點,即對于每個數(shù)據(jù)點只包含點的三維坐標(biāo)值,而沒有明確給出其對應(yīng)的幾何拓?fù)湫畔ⅲ虼艘话阈枰鶕?jù)空間點的鄰域關(guān)系估算點對應(yīng)的拓?fù)潢P(guān)系[5],從而估算點對應(yīng)的幾何信息(如數(shù)據(jù)點單位法向量、微切平面、曲率大小和鄰接關(guān)系)。
通常,計算某點的k個最近鄰域的方法是求出候選點與其余n-1個點的歐氏距離,并按從小到大的順序排列,前面的k個點即為候選點的k最近鄰域。這種方法很直觀,然而對于海量的點云數(shù)據(jù)而言,采用這種方法相當(dāng)耗時,效率十分低下。本文通過對點云數(shù)據(jù)建立kd-tree索引,進(jìn)而利用kd-tree進(jìn)行點云鄰域搜索[6],算法如下:
假設(shè)kd-tree的結(jié)點為i,每一個結(jié)點都對應(yīng)一個區(qū)域(根結(jié)點對應(yīng)整個點區(qū)域),那么結(jié)點i所對應(yīng)的區(qū)域為Reg(i);R表示所要查找的區(qū)域范圍。范圍查詢的函數(shù)Search(i,R)的算法描述如下:
①首先i=root,即表示從根結(jié)點開始搜索;
②如果i是葉子結(jié)點,那么返回該葉子結(jié)點中處于R中的點;
③如果R包含Reg(i),那么返回v的所有子樹結(jié)點;
④否則,如果Reg(lefi(i))和R相交,那么search(left (i),R);如果Reg(right(i))和R相交,那么seareh(righr(i),尺)。
KD 樹是把整個空間劃分為特定的幾個部分,然后在特定空間的部分內(nèi)可以進(jìn)行相關(guān)搜索操作。搜索的核心在于找到實例點的鄰居,關(guān)于搜索主要有兩種搜索模式[7]:范圍搜索和最近鄰搜索。
2.1 范圍搜索
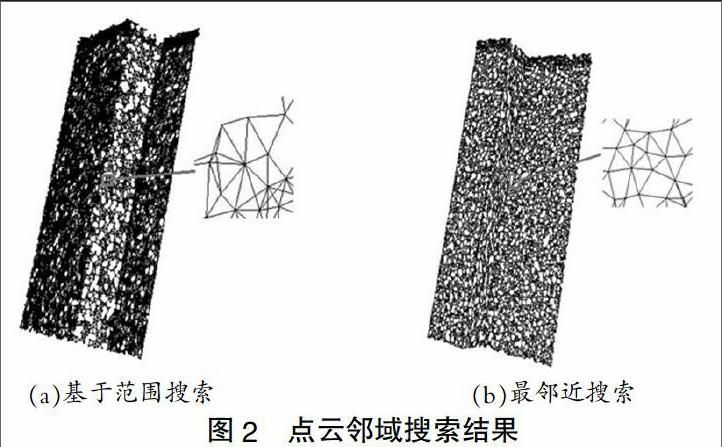
范圍搜索就是利用與實例點的空間距離作為判定標(biāo)準(zhǔn),來尋找滿足條件的點作為鄰近點,因為特征空間中兩個實例點的距離和反應(yīng)出兩個實例點之間的相似性程度。K近鄰模型的特征空間一般是n維實數(shù)向量空間,使用的距離一般使用歐式距離。三維激光掃描儀掃描得到的墻角點云比較復(fù)雜,利用kd-tree索引管理技術(shù)可以方便的搜索出任意點的鄰近點,從而快速建立起點云的拓?fù)潢P(guān)系,在搜索中我們可以采取基于點數(shù)以及基于距離(即范圍)來快速搜索鄰近點。如圖2(a)所示。
2.2 最近鄰搜索
最鄰近搜索就是給定查詢點及正整數(shù)K,從數(shù)據(jù)集中找到距離查詢點最近的K個數(shù)據(jù)點。與范圍搜索不同,K值只要大于1就一定可以找出對應(yīng)的鄰近點,而范圍搜索如果設(shè)置的距離閾值可能會使得點云中比較稀的點沒有滿足條件的鄰近點。如圖2(b)所示。
3 實例分析
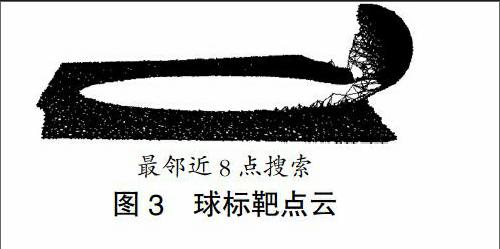
現(xiàn)采用kd-tree建立散亂點云的索引技術(shù),并快速建立散亂點云的拓?fù)潢P(guān)系。利用三維激光掃描儀可掃描得到的球標(biāo)靶點云,通過對該點云建立kd-tree索引,可以快速獲得該點云的拓?fù)潢P(guān)系。如圖3所示為利用最鄰近8點搜索得到的點云拓?fù)渚W(wǎng)結(jié)構(gòu),原始點云的點數(shù)為35743,利用kd-trees索引來建立其拓?fù)潢P(guān)系所用的時間是3.8s。利用此方法獲得點云的拓?fù)潢P(guān)系相比利用貪婪三角化獲得拓?fù)潢P(guān)系更加高效。
最鄰近8點搜索
4 總結(jié)
激光雷達(dá)技術(shù)在快速、精確獲取空間目標(biāo)的幾何數(shù)據(jù)方面已取得了突破性進(jìn)展,與此同時也給海量雷達(dá)數(shù)據(jù)的處理效率帶來了挑戰(zhàn)。本文針對激光雷達(dá)系統(tǒng)所獲取的點云數(shù)據(jù)在管理與檢索,提出了基于kd-tree的點云管理方案。利用三維激光點云數(shù)據(jù)進(jìn)行實驗并利用編程實現(xiàn),結(jié)果表明通過對散亂點云建立kd-tree索引可以快速建立建立點云拓?fù)潢P(guān)系,從而方便了對點云的后處理。
【參考文獻(xiàn)】
[1]張毅.地面三維激光掃描點云數(shù)據(jù)處理方法研究[D].武漢:武漢大學(xué),2008.
[2]減克.地面激光雷達(dá)應(yīng)用處理關(guān)鍵技術(shù)研究[D].北京:首都師范大學(xué),2007.
[3]劉經(jīng)南,張小紅.激光掃描測高技術(shù)的發(fā)展與現(xiàn)狀[J].武漢大學(xué)學(xué)報·信息科學(xué)版,2003,28(2):132-137.
[4]路明月,何永健.三維海量點云數(shù)據(jù)的組織與索引方法[J].地球信息科學(xué), 2008,10(2):190-194
[5]PIEGL L A. TILLER W. Algorithm for Finding All K Nearest Neighbors[J]. Computer-Aided Design,2002,34(2):167-172.
[6]劉立強.散亂點云數(shù)據(jù)處理相關(guān)算法的研究[D].西北大學(xué),2010.
[7]劉艷豐.基于 kd-tree 的點云數(shù)據(jù)空間管理理論與方法[D].長沙:中南大學(xué), 2009.
[責(zé)任編輯:曹明明]