無(wú)軸承交替極永磁電機(jī)集中式懸浮繞組結(jié)構(gòu)及其優(yōu)化設(shè)計(jì)方法
2015-10-19 06:21:46鄧智泉王曉琳
電工技術(shù)學(xué)報(bào) 2015年18期
關(guān)鍵詞:優(yōu)化
丁 強(qiáng) 鄧智泉 王曉琳
?
無(wú)軸承交替極永磁電機(jī)集中式懸浮繞組結(jié)構(gòu)及其優(yōu)化設(shè)計(jì)方法
丁 強(qiáng)1,2鄧智泉1王曉琳1
(1. 南京航空航天大學(xué)自動(dòng)化學(xué)院 南京 210016 2. 南京工業(yè)職業(yè)技術(shù)學(xué)院能源與電氣工程學(xué)院 南京 210023)
在一臺(tái)12槽8極無(wú)軸承交替極永磁電機(jī)上研究了集中式懸浮繞組結(jié)構(gòu)對(duì)電機(jī)懸浮性能的影響,研究并提出能夠提高懸浮性能的繞組結(jié)構(gòu)及優(yōu)化方法。首先,分析兩相和三相傳統(tǒng)集中式繞組徑向存在較強(qiáng)耦合關(guān)系的原因。其次,研究一種帶輔助線(xiàn)圈的三相改進(jìn)集中式繞組結(jié)構(gòu),并提出一種帶輔助線(xiàn)圈的兩相改進(jìn)集中式繞組結(jié)構(gòu)以驗(yàn)證兩相繞組經(jīng)優(yōu)化改進(jìn)作為懸浮繞組的可能性。然后,為優(yōu)化改進(jìn)集中式懸浮繞組結(jié)構(gòu),研究了基于懸浮力解析的繞組優(yōu)化法。但該方法優(yōu)化過(guò)程復(fù)雜,從簡(jiǎn)化繞組優(yōu)化設(shè)計(jì)過(guò)程角度,提出基于懸浮磁動(dòng)勢(shì)總諧波畸變最小的繞組優(yōu)化法。最后,將兩種繞組優(yōu)化法用于兩相和三相改進(jìn)集中式懸浮繞組的優(yōu)化中,理論和有限元分析結(jié)果表明本文所提優(yōu)化方法的有效性。
無(wú)軸承電機(jī) 交替極 繞組結(jié)構(gòu) 優(yōu)化方法 總諧波畸變最小 懸浮性能
0 引言
無(wú)軸承電機(jī)將磁軸承和電機(jī)驅(qū)動(dòng)集成在同一電機(jī)內(nèi),具有結(jié)構(gòu)簡(jiǎn)單、軸向長(zhǎng)度短、體積小和成本低的優(yōu)勢(shì)[1-4]。目前,諸如無(wú)軸承表貼式永磁電機(jī)、無(wú)軸承感應(yīng)電機(jī)等得到廣泛研究。但是,這兩類(lèi)無(wú)軸承電機(jī)懸浮控制依賴(lài)轉(zhuǎn)子位置信息,導(dǎo)致控制系統(tǒng)成本和復(fù)雜度提高。此外,無(wú)軸承表貼式永磁電機(jī)存在轉(zhuǎn)矩和懸浮力性能無(wú)法兼顧的不足[5]。
為解決上述問(wèn)題,提出無(wú)軸承同極式電機(jī)和無(wú)軸承交替極永磁電機(jī)[6, 7]。與無(wú)軸承交替極永磁電機(jī)相比,無(wú)軸承同極式電機(jī)轉(zhuǎn)子由兩個(gè)凸極轉(zhuǎn)子鐵心串聯(lián)構(gòu)成,電機(jī)軸向長(zhǎng)度較長(zhǎng)。因此,無(wú)軸承交替極永磁電機(jī)在實(shí)現(xiàn)懸浮控制與轉(zhuǎn)子位置解耦的同時(shí),解決了懸浮力和轉(zhuǎn)矩不能兼顧的問(wèn)題。此外,若轉(zhuǎn)子做成薄片狀,可實(shí)現(xiàn)兩自由度主動(dòng)控制,能進(jìn)一步縮短軸向長(zhǎng)度和減小體積。
無(wú)軸承交替極永磁電機(jī)可采用分布式和集中式懸浮繞組。文獻(xiàn)[8,9]研究了分布式懸浮繞組下的電機(jī)懸浮性能,但分布式繞組存在繞組端部較長(zhǎng)的問(wèn)題;文獻(xiàn)[10,11]在集中式懸浮繞組下,研究了不同定轉(zhuǎn)子結(jié)構(gòu)的無(wú)軸承交替極永磁電機(jī);文獻(xiàn)[12]提出一種帶輔助線(xiàn)圈的三相集中式懸浮繞組結(jié)構(gòu),并從降低懸浮力徑向耦合角度,對(duì)繞組進(jìn)行優(yōu)化。但文獻(xiàn)[12]的繞組優(yōu)化方法依賴(lài)懸浮力解析表達(dá)式,且推導(dǎo)和優(yōu)化過(guò)程復(fù)雜;文獻(xiàn)[13,14]研究了分布式繞組無(wú)軸承交替極永磁電機(jī)空載氣隙磁場(chǎng)分布的解析技術(shù)方法;文獻(xiàn)[15]對(duì)分布式繞組無(wú)軸承交替極永磁提出直接懸浮力控制策略。
為進(jìn)一步簡(jiǎn)化繞組優(yōu)化過(guò)程,本文提出一種基于懸浮磁動(dòng)勢(shì)總諧波畸變最小原則的繞組優(yōu)化方法。同時(shí),無(wú)軸承交替極永磁電機(jī)懸浮繞組多采用三相形式,為探討兩相集中式繞組經(jīng)過(guò)優(yōu)化改進(jìn)后作為懸浮繞組的可能性,本文提出一種帶輔助線(xiàn)圈的兩相改進(jìn)集中式懸浮繞組結(jié)構(gòu)。在此基礎(chǔ)上,將所提繞組優(yōu)化方法應(yīng)用于兩相和三相帶輔助線(xiàn)圈的集中式懸浮繞組上,通過(guò)理論和有限元分析驗(yàn)證所提方法的正確性。
1 電機(jī)結(jié)構(gòu)及懸浮原理
本文在一臺(tái)12齒8極無(wú)軸承交替極永磁電機(jī)上,首先研究?jī)上嗪腿鄠鹘y(tǒng)集中式懸浮繞組的懸浮特性,如圖1所示。
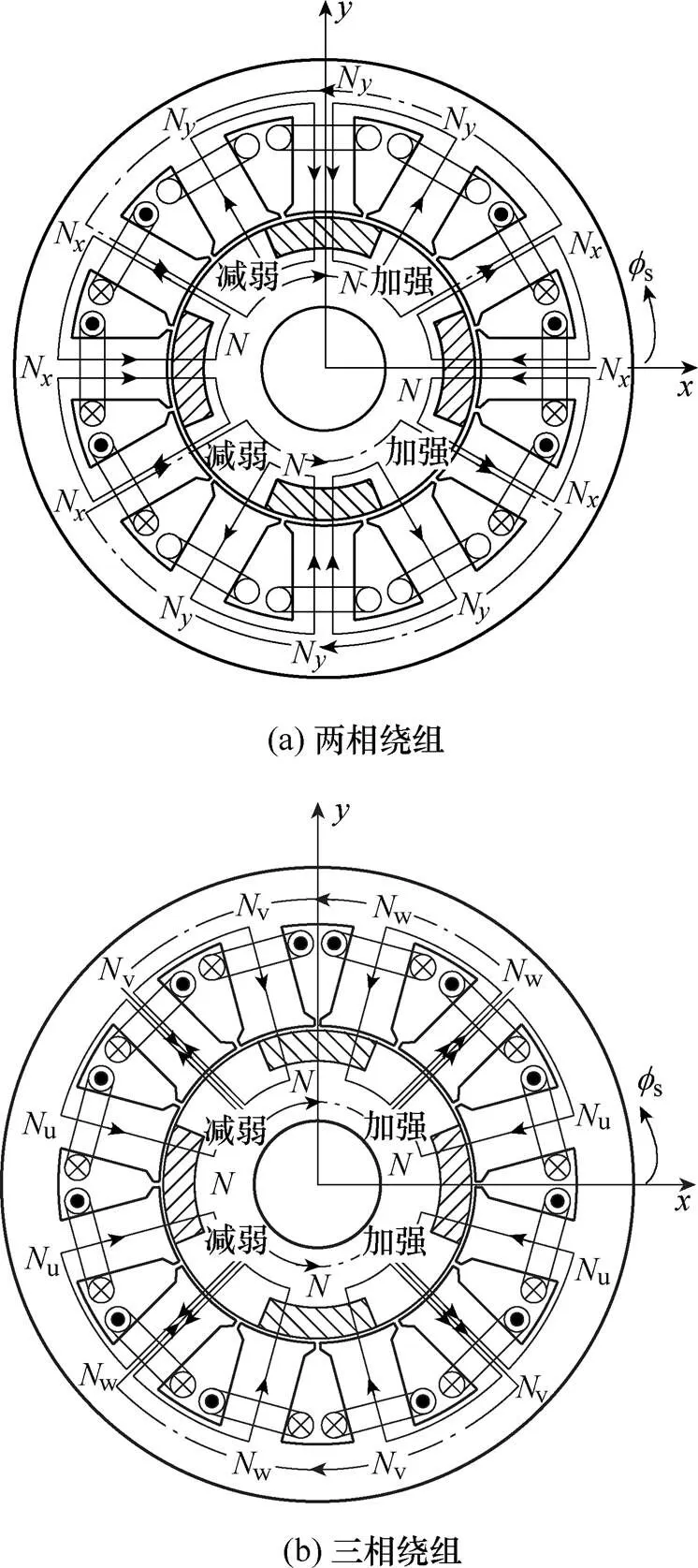
圖1 傳統(tǒng)集中式懸浮繞組
圖1定義了徑向和自由度正方向以及定子空間角的正方向。以產(chǎn)生正方向懸浮力為例,說(shuō)明傳統(tǒng)兩相和三相集中式懸浮繞組的懸浮力產(chǎn)生原理。兩相繞組配置時(shí),在懸浮繞組內(nèi)通如圖1a所示的懸浮電流,懸浮繞組內(nèi)不注入電流;三相繞組配置時(shí),懸浮繞組u、v、w通入圖1b所示懸浮電流,其中v、w兩相電流大小為u相的二分之一。
因?yàn)橛来朋w磁阻大于轉(zhuǎn)子鐵極,懸浮繞組的一對(duì)極懸浮磁通(圖中點(diǎn)劃線(xiàn)所示)主要通過(guò)鐵極閉合。極弧系數(shù)為1的四塊S極面向氣隙的永磁體產(chǎn)生的永磁磁通(圖中實(shí)線(xiàn)所示)將永磁極間的轉(zhuǎn)子磁化為N極。永磁磁通和懸浮磁通疊加使右側(cè)氣隙磁場(chǎng)密度增強(qiáng)、左側(cè)氣隙磁通密度減弱,從而產(chǎn)生指向正方向的懸浮力。若要產(chǎn)生方向懸浮力僅需注入方向懸浮電流即可。此外,由于懸浮磁通始終經(jīng)過(guò)鐵極閉合,懸浮力與轉(zhuǎn)子位置無(wú)關(guān)。
2 傳統(tǒng)集中式懸浮繞組
圖1a的兩相繞組軸線(xiàn)空間正交(、分別代表和方向繞組線(xiàn)圈),每相繞組由6個(gè)集中式線(xiàn)圈組成,繞在相鄰3個(gè)定子齒上的3個(gè)線(xiàn)圈構(gòu)成一個(gè)線(xiàn)圈組,徑向相對(duì)的兩個(gè)線(xiàn)圈組串聯(lián)連接。圖1b的三相懸浮繞組軸線(xiàn)互差120°電角度((u、v、w)代表相線(xiàn)圈),每相繞組包含兩個(gè)線(xiàn)圈組,繞在相鄰兩個(gè)定子齒上的兩個(gè)線(xiàn)圈構(gòu)成一個(gè)線(xiàn)圈組,互差180°兩個(gè)線(xiàn)圈組串聯(lián)連接。
通入圖1所示正方向懸浮電流,一個(gè)電周期(機(jī)械角度90°)的懸浮力有限元分析波形如圖2所示,其中、分別表示正方向有效懸浮力以及方向耦合懸浮力。可以看出,三相繞組有效懸浮力脈動(dòng)高于兩相繞組。同時(shí),無(wú)論兩相還是三相繞組,一個(gè)電周期內(nèi)方向耦合懸浮力近似一個(gè)周期的正弦波動(dòng),因此懸浮力4次諧波分量是造成徑向耦合的主要原因。
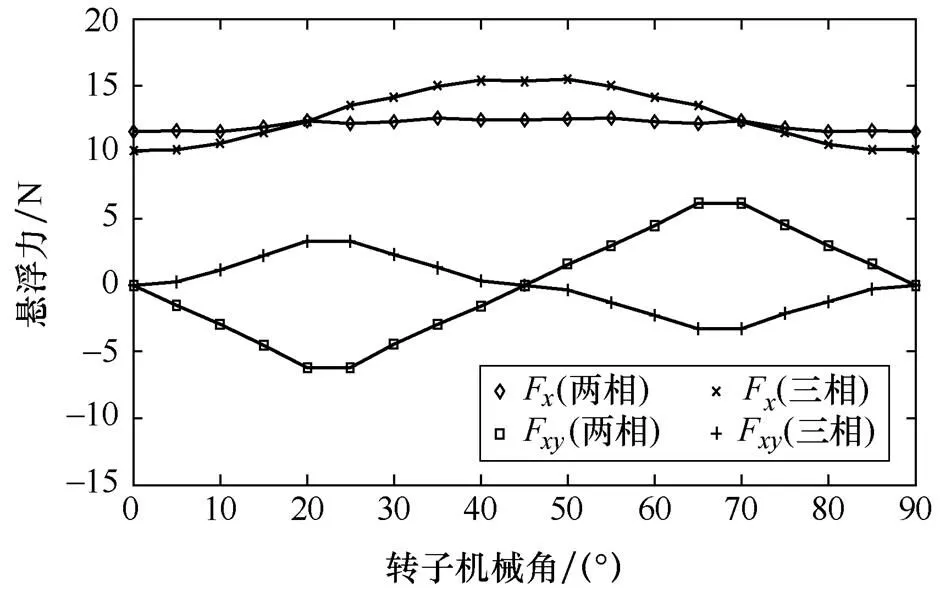
圖2 傳統(tǒng)集中式繞組懸浮力波形
為定量分析懸浮特性,定義懸浮力脈動(dòng)率r和徑向最大耦合度c兩個(gè)參數(shù)
式中,max、min和av表示一個(gè)電周期有效懸浮力最大值、最小值和平均值。
依據(jù)圖2有限元分析結(jié)果,結(jié)合式(1)可計(jì)算傳統(tǒng)集中式懸浮繞組的懸浮力脈動(dòng)率以及徑向最大耦合度等懸浮特性,見(jiàn)表1。
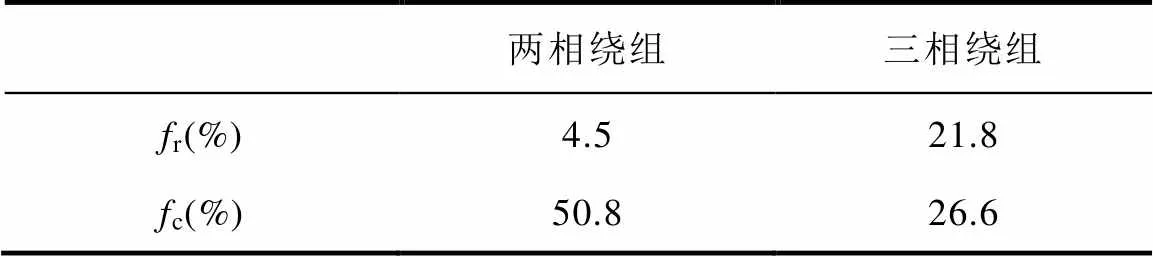
表1 傳統(tǒng)集中式繞組懸浮特性
可以看出,兩相繞組的懸浮力脈動(dòng)為4.5%,而徑向耦合度高達(dá)50.8%,三相繞組的懸浮力脈動(dòng)和徑向耦合度分別為21.8%和26.6%。從提高懸浮控制精度、系統(tǒng)抗擾性及降低功耗角度,期望參數(shù)r和c均小于10%,需要對(duì)傳統(tǒng)懸浮繞組加以改進(jìn)。
3 改進(jìn)集中式懸浮繞組
研究表明,傳統(tǒng)集中式懸浮繞組磁動(dòng)勢(shì)空間分布及各次諧波含量由電機(jī)定子齒槽數(shù)和繞組相數(shù)決定,而磁動(dòng)勢(shì)空間諧波分量會(huì)造成懸浮力脈動(dòng)和徑向耦合的增加,導(dǎo)致懸浮性能惡化。對(duì)于集中式繞組結(jié)構(gòu),通過(guò)引入輔助線(xiàn)圈構(gòu)造分布效應(yīng)達(dá)到降低磁動(dòng)勢(shì)空間諧波含量的目的。
基于上述思想,文獻(xiàn)[12]提出一種三相改進(jìn)集中式懸浮繞組結(jié)構(gòu),如圖3a所示,并提出基于懸浮力解析的繞組優(yōu)化方法。
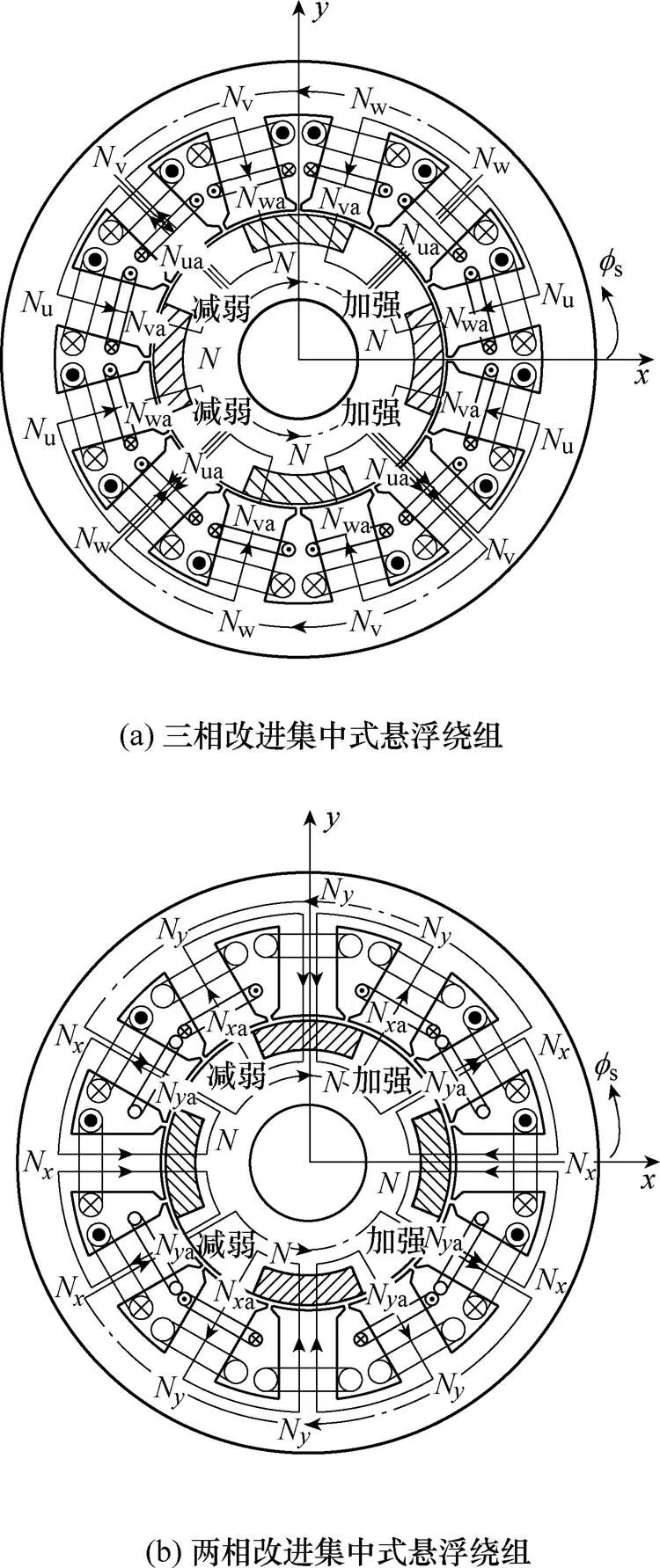
圖3 改進(jìn)集中式懸浮繞組
考慮到懸浮磁動(dòng)勢(shì)空間高次諧波對(duì)懸浮性能產(chǎn)生的不利影響,本文提出基于懸浮磁動(dòng)勢(shì)總諧波畸變最小原則的繞組簡(jiǎn)易優(yōu)化方法,并提出一種兩相改進(jìn)集中式懸浮繞組結(jié)構(gòu),如圖3b所示,證明經(jīng)過(guò)優(yōu)化的兩相懸浮繞組的可行性。
改進(jìn)集中式懸浮繞組與傳統(tǒng)集中式懸浮繞組不同在于引入集中式輔助線(xiàn)圈a(=、、u、v、w),如圖3所示。輔助線(xiàn)圈繞在相應(yīng)主繞組線(xiàn)圈組相鄰定子齒上,并與主繞組線(xiàn)圈串聯(lián)連接。輔助線(xiàn)圈與主繞組線(xiàn)圈匝數(shù)關(guān)系為
式中,、a為主繞組線(xiàn)圈和輔助線(xiàn)圈匝數(shù);為輔助繞組線(xiàn)圈與主繞組線(xiàn)圈匝數(shù)比且在區(qū)間[0, 1]取值。改進(jìn)集中式繞組懸浮原理與傳統(tǒng)集中式懸浮繞組類(lèi)似,如圖3所示。
3.1 懸浮力解析優(yōu)化法
為得到最優(yōu)繞組配置,需要解析電機(jī)懸浮力表達(dá)式。以產(chǎn)生方向懸浮力為例進(jìn)行推導(dǎo),并做如下假設(shè):①定轉(zhuǎn)子間無(wú)偏心;②磁路不飽和;③僅考慮氣隙磁通密度徑向分量;④不計(jì)鐵心磁壓降,僅考慮鐵極下懸浮力;⑤忽略齒槽效應(yīng);⑥磁動(dòng)勢(shì)沿氣隙圓周在空間按矩形規(guī)律分布。
式中,p、分別為永磁磁動(dòng)勢(shì)和懸浮磁動(dòng)勢(shì)。
依據(jù)圖3繞組配置可得改進(jìn)集中式繞組懸浮磁動(dòng)勢(shì)空間分布,如圖4所示。可以看出,改變?cè)褦?shù)比,能改變磁動(dòng)勢(shì)空間分布,從而改變空間諧波含量。其中為單個(gè)線(xiàn)圈匝數(shù),而對(duì)于兩相繞組為的電流,對(duì)于三相繞組則為u的電流。
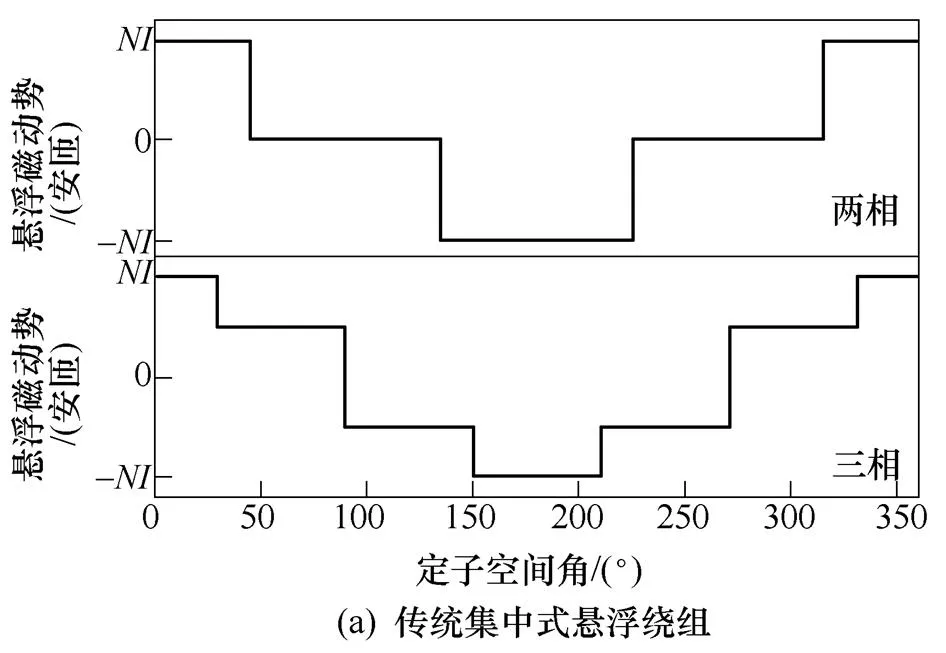
考慮到諧波次數(shù)越高,其相對(duì)基波占比越小,對(duì)懸浮性能影響越小。為簡(jiǎn)化推導(dǎo)過(guò)程,對(duì)圖4磁動(dòng)勢(shì)分布傅里葉展開(kāi)時(shí)取最高次諧波為19次,則兩相和三相改進(jìn)集中式繞組懸浮磁動(dòng)勢(shì)可表示為
由式(4)可知,匝數(shù)比直接影響懸浮磁動(dòng)勢(shì)空間諧波,值不同,則諧波成分及含量不同。
有效懸浮力和方向耦合懸浮力可由如下積分得到
式中,、分別表示電機(jī)軸向長(zhǎng)度、平均氣隙半徑。
將式(3)~式(5)代入(6)可得
由式(7)和式(8)可知,匝數(shù)比影響懸浮力諧波分量成分和大小,且無(wú)論兩相還是三相繞組的、均受4次、12次和20次諧波分量影響。從降低徑向耦合角度,需要研究方向耦合懸浮力諧波系數(shù)關(guān)于匝數(shù)比的變化規(guī)律,如圖5所示,其中懸浮力諧波的諧波系數(shù)分別指4次、12次和20次諧波分量的系數(shù)。
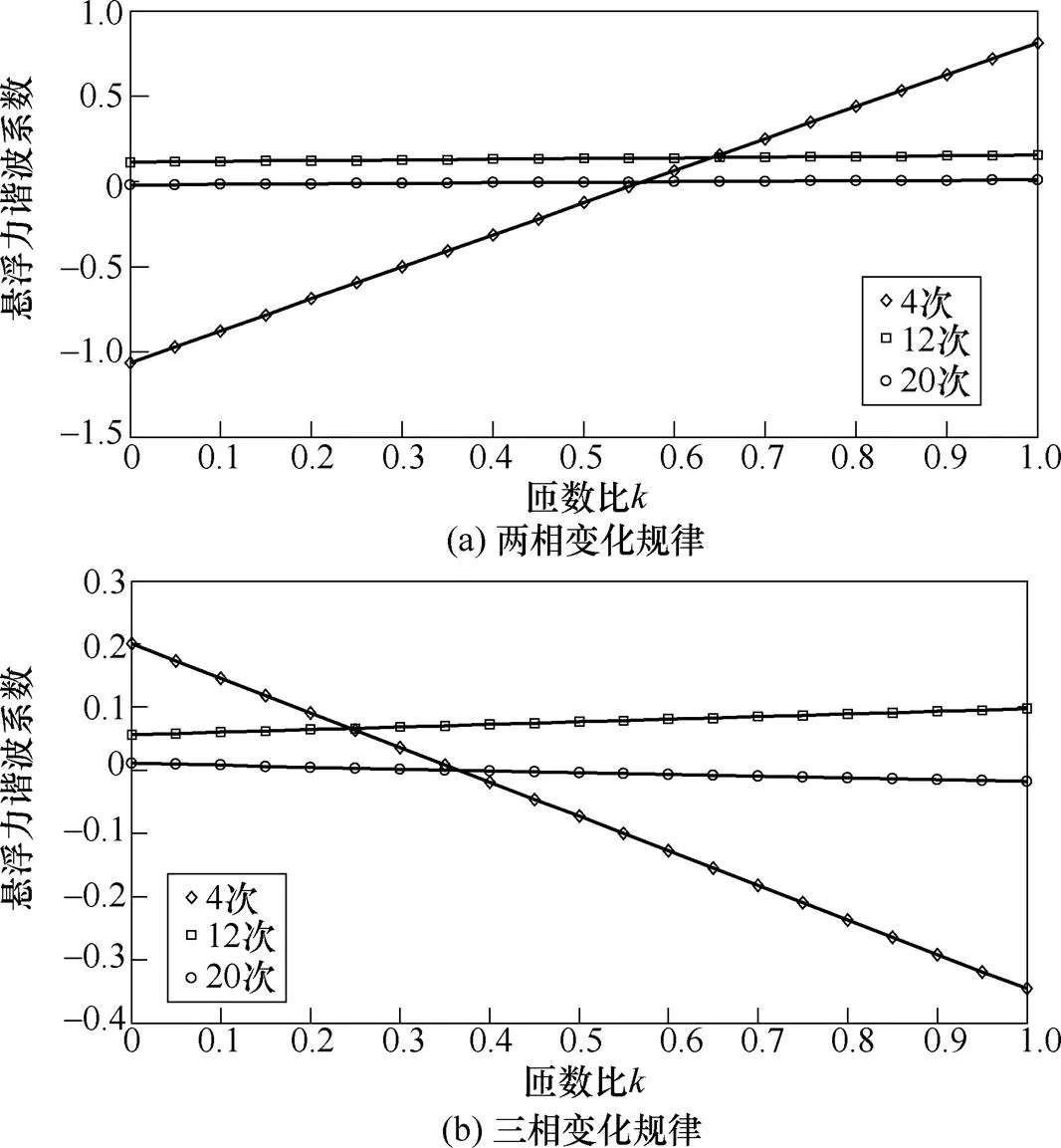
圖5 Fxy諧波系數(shù)變化規(guī)律
可以看出,無(wú)論兩相還是三相繞組結(jié)構(gòu)均無(wú)法消除中12次諧波分量。此外,匝數(shù)比的取值對(duì)4次諧波分量影響較強(qiáng),而對(duì)12次、20次諧波分量影響較弱,同時(shí),當(dāng)4次諧波分量為零時(shí),20次諧波分量也得到充分抑制,因此,以消除4次諧波分量作為優(yōu)化目標(biāo)。
若2、3的4次諧波分量系數(shù)設(shè)為零,則懸浮力徑向耦合降低,同時(shí)確定匝數(shù)比,結(jié)果見(jiàn)表2。

表2 改進(jìn)集中式繞組匝數(shù)比
3.2 懸浮磁動(dòng)勢(shì)總諧波畸變最小優(yōu)化法
上節(jié)推導(dǎo)懸浮力表達(dá)式時(shí)假設(shè)懸浮磁動(dòng)勢(shì)最高次諧波為19次,本節(jié)考慮懸浮磁動(dòng)勢(shì)僅含基波,而無(wú)高次諧波的情況,以研究磁動(dòng)勢(shì)空間諧波對(duì)懸浮特性的影響。
假設(shè)理想正弦分布的懸浮磁動(dòng)勢(shì)表達(dá)式為
式中,m為磁動(dòng)勢(shì)基波幅值。
將式(3)、式(5)和式(10)代入式(6)積分可得
由式(11)可知,懸浮磁動(dòng)勢(shì)為理想正弦分布式時(shí),方向有效懸浮力為無(wú)脈動(dòng)的恒定值,同時(shí),方向耦合懸浮力等于零。也就是說(shuō),當(dāng)懸浮磁動(dòng)勢(shì)總諧波畸變?yōu)榱銜r(shí),電機(jī)具有最優(yōu)懸浮 性能。
但是,實(shí)際電機(jī)由于齒槽效應(yīng)、繞組結(jié)構(gòu)等原因,懸浮磁動(dòng)勢(shì)除含有基波分量外,同時(shí)包含相應(yīng)的諧波分量,尤其集中式懸浮繞組結(jié)構(gòu),磁動(dòng)勢(shì)諧波含量更為豐富。因此,當(dāng)無(wú)法產(chǎn)生理想正弦磁動(dòng)勢(shì)分布時(shí),最大程度降低磁動(dòng)勢(shì)諧波含量是提高懸浮性能的有效途徑之一。
基于上述分析,本文提出懸浮磁動(dòng)勢(shì)總諧波畸變最小原則的繞組優(yōu)化方法。此外,通過(guò)電機(jī)本體結(jié)構(gòu)優(yōu)化實(shí)現(xiàn)懸浮磁動(dòng)勢(shì)總諧波畸變最小,也能達(dá)到提高懸浮性能的目的,因此,本文所提方法具有通用性,適用于不同定轉(zhuǎn)子結(jié)構(gòu)、不同繞組配置的電機(jī)結(jié)構(gòu)。
對(duì)圖4磁動(dòng)勢(shì)空間分布進(jìn)行傅里葉展開(kāi),可得兩相和三相改進(jìn)集中式繞組磁動(dòng)勢(shì)次諧波傅里葉系數(shù)為2、3(=1,2,3???),即
懸浮磁動(dòng)勢(shì)總諧波畸變定義為
將式(12)代入式(13)可得兩相懸浮磁動(dòng)勢(shì)總諧波畸變THD2和三相懸浮磁動(dòng)勢(shì)總諧波畸變THD3為
圖6為磁動(dòng)勢(shì)總諧波畸變相對(duì)于匝數(shù)比的變化規(guī)律。可以看出,磁動(dòng)勢(shì)總諧波畸變由匝數(shù)比決定,優(yōu)化匝數(shù)比值,可得到磁動(dòng)勢(shì)總諧波畸變最小值。對(duì)式(14)求取最小值,即可得到優(yōu)化繞組配置,結(jié)果見(jiàn)表2。
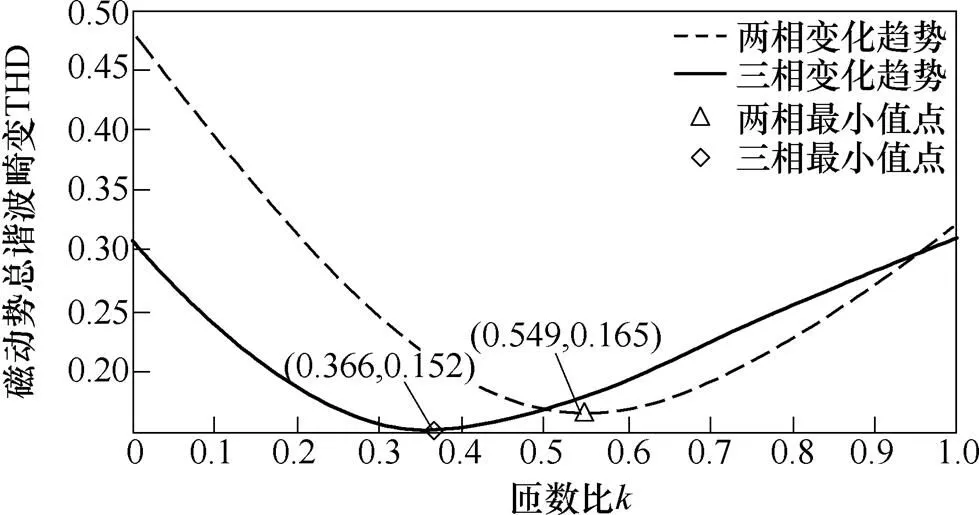
圖6 懸浮磁動(dòng)勢(shì)THD變化趨勢(shì)
3.3 兩種優(yōu)化法的性能對(duì)比
對(duì)比3.1節(jié)和3.2節(jié)的優(yōu)化過(guò)程可知,懸浮磁動(dòng)勢(shì)總諧波畸變最小的繞組優(yōu)化方法具有物理意義明確、優(yōu)化過(guò)程簡(jiǎn)單的優(yōu)點(diǎn)。本節(jié)從理論和有限元分析兩方面,對(duì)兩種優(yōu)化方法的懸浮性能進(jìn)行對(duì)比。
對(duì)于三相改進(jìn)集中式繞組,法Ⅰ和法Ⅱ所得匝數(shù)比均為0.366,兩種優(yōu)化方法等效。將優(yōu)化的匝數(shù)比代入式(8)可得懸浮力脈動(dòng)率和最大徑向耦合度,見(jiàn)表3。從理論計(jì)算結(jié)果來(lái)看,三相改進(jìn)集中式繞組的懸浮力脈動(dòng)率和徑向最大耦合度分別為0.3%和2.8%,均滿(mǎn)足要求。

表3 改進(jìn)集中式繞組懸浮特性 (%)
圖7為三相改進(jìn)集中式繞組一個(gè)電周期的懸浮力有限元分析波形。利用式(1)計(jì)算懸浮力脈動(dòng)率和最大徑向耦合度,見(jiàn)表3。從有限元分析角度,相對(duì)于傳統(tǒng)集中式懸浮繞組,改進(jìn)集中式繞組懸浮力脈動(dòng)率由21.8%下降至1.0%,最大徑向耦合度由26.6%降至4.6%,均滿(mǎn)足懸浮性能要求。
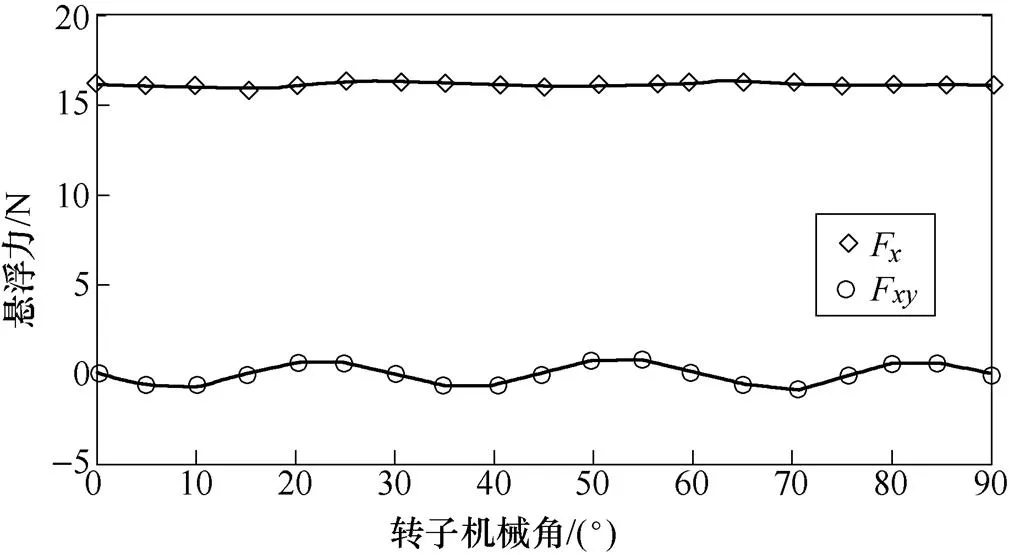
圖7 三相改進(jìn)集中式繞組懸浮力波形
對(duì)于兩相改進(jìn)集中式繞組,法Ⅰ和法Ⅱ得到的匝數(shù)比略有差別,分別將兩種方法得到的匝數(shù)比代入式(7)可得懸浮力脈動(dòng)率和最大徑向耦合度(見(jiàn)表3)。由理論計(jì)算結(jié)果可知,法Ⅰ的懸浮力脈動(dòng)率為4.9%,而法Ⅱ?yàn)?.5%;法Ⅰ的最大徑向耦合度為3.7%,而法Ⅱ?yàn)?.6%。
圖8為兩相改進(jìn)集中式繞組在兩種優(yōu)化方法下一個(gè)電周期懸浮力有限元分析波形,兩種優(yōu)化法所得懸浮力波形幾乎重合。利用式(7)計(jì)算懸浮力脈動(dòng)率和最大徑向耦合度(見(jiàn)表3),兩種優(yōu)化方法的懸浮性能幾乎一致。法Ⅰ和法Ⅱ懸浮力脈動(dòng)率均為6.1%,法Ⅰ最大徑向耦合度為6.6%,法Ⅱ?yàn)?.1%。從有限元分析角度,相對(duì)兩相傳統(tǒng)集中式繞組,優(yōu)化后的兩相改進(jìn)集中式繞組懸浮力脈動(dòng)略有增加,而最大徑向耦合度由50.8%降至7%左右。
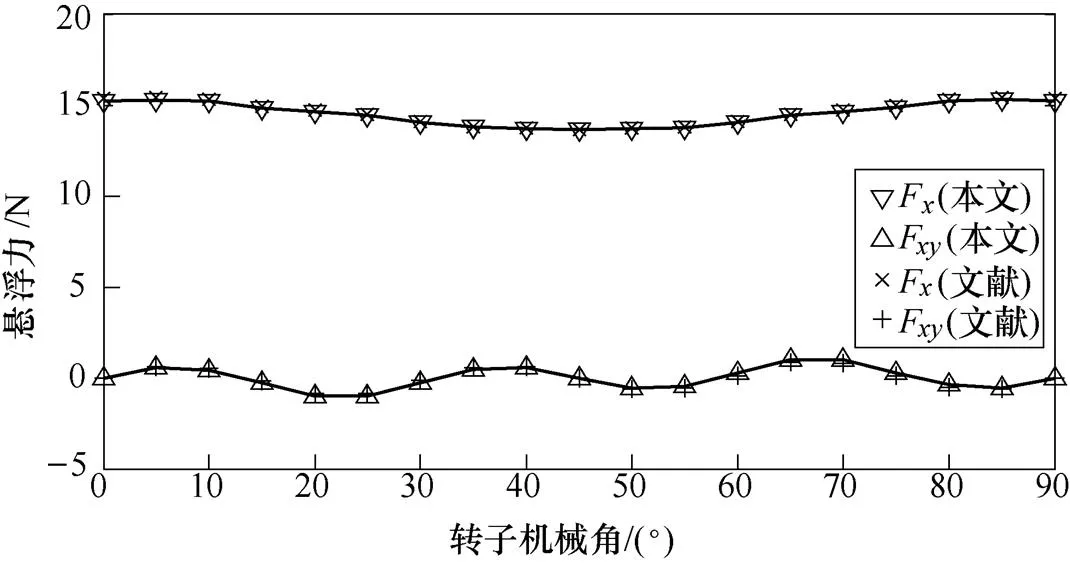
圖8 兩相改進(jìn)集中式繞組懸浮力波形
就最大徑向耦合度而言,無(wú)論理論值還是有限元分析值,法Ⅱ略高于法I,這是因?yàn)榉á褚韵较蝰詈蠎腋×?i>中4次諧波分量為目標(biāo),而法Ⅱ以降低懸浮磁動(dòng)勢(shì)總諧波含量為目標(biāo),對(duì)特定次諧波抵消弱于法Ⅰ。但是,法Ⅱ用銅量較少、優(yōu)化過(guò)程簡(jiǎn)單、物理意義明確,且在不犧牲懸浮性能的前提下,能較快確定優(yōu)化的繞組結(jié)構(gòu)。
4 結(jié)論
本文在一臺(tái)無(wú)軸承交替極永磁電機(jī)上,對(duì)集中式懸浮繞組結(jié)構(gòu)對(duì)電機(jī)懸浮性能的影響展開(kāi)研究。首先研究?jī)上嗪腿鄠鹘y(tǒng)集中式懸浮繞組結(jié)構(gòu)及其懸浮性能,指出懸浮力的4次諧波分量造成徑向自由度耦合。為提高電機(jī)懸浮性能,研究了帶輔助線(xiàn)圈的三相改進(jìn)集中式懸浮繞組結(jié)構(gòu),同時(shí),為驗(yàn)證兩相繞組經(jīng)優(yōu)化改進(jìn)后作為懸浮繞組的可行性,提出一種兩相改進(jìn)集中式懸浮繞組結(jié)構(gòu)。在改進(jìn)集中式懸浮繞組基礎(chǔ)上,研究了基于懸浮力解析的繞組優(yōu)化法。但是該優(yōu)化過(guò)程需要推導(dǎo)電機(jī)懸浮力表達(dá)式且優(yōu)化過(guò)程需要考慮轉(zhuǎn)子結(jié)構(gòu)影響,無(wú)通用性。出于簡(jiǎn)化繞組優(yōu)化的考慮,本文提出基于懸浮磁動(dòng)勢(shì)總諧波畸變最小的繞組優(yōu)化方法,該方法僅考慮電機(jī)定子和懸浮繞組結(jié)構(gòu),即可確定主繞組與輔助繞組匝數(shù)優(yōu)化配比。最后分別將兩種繞組優(yōu)化方法應(yīng)用于兩相和三相改進(jìn)集中式繞組優(yōu)化中,理論和有限元分析結(jié)果證明本文所提方法的有效性。
[1] Chiba A, Rahman M A, Fukao T. Radial force in a bearingless reluctance motor[J]. IEEE Transactions on Magnetics, 1991, 27(2): 786-790.
[2] Chiba A, Asama J. Influence of rotor skew in induction type bearingless motor[J]. IEEE Transactions on Magnetics, 2012, 48(11): 4646-4649.
[3] Li Chen, Hofmann W. Speed regulation technique of one bearingless 8/6 switched reluctance motor with simpler single winding structure[J]. IEEE Transactions on Industrial Electronics, 2012, 59(6): 2592-2600.
[4] Huang J, Li B N, Jiang H B, et al. Analysis and control of multiphase permanent-magnet bearingless motor with a single set of half-coiled winding[J]. IEEE Transactions on Industrial Electronics, 2014, 61(7): 3137-3145.
[5] Ooshima M, Chiba A, Fukao T, et al. Design and analysis of permanent magnet-type bearingless motors[J]. IEEE Transaction on Industrial Electronics, 1996, 43(2): 292-299.
[6] Asama J, Natsume R, Fukuhara H, et al. Optimal suspension winding configuration in a homo-polar bearingless motor[J]. IEEE Transaction on Magnetics, 2012, 48(11): 2973-2976.
[7] Amemiya J, Chiba A, Dorrell D G, et al. Basic characteristics of a consequent-pole-type bearingless motor[J]. IEEE Transactions on Industrial Electronics, 2005, 41(1): 82-89.
[8] Yamada T, Nakano Y, Asama J, et al. Outer rotor consequent-pole bearingless motor with improved start-up characteristics[J]. IEEE Transaction on Magnetics, 2008, 44(11): 4273-4276.
[9] Asano Y, Mizuguchi A, Amada M, et al. Developmentof a four-axis actively controlled consequent-pole-
type bearingless motor[J]. IEEE Transactions on Industry Applications, 2009, 45(4): 1378-1386.
[10] Sugimoto H, Kamiya K, Nakamura R, et al. Design and basic characteristics of multi-consequent-pole bearingless motor with bi-tooth main poles[J]. IEEE Transactions on Magnetics, 2009, 45(6): 2791-2794.
[11] Asama J, Kanehara D, Oiwa T, et al. Development of a compact centrifugal pump with a two-axis actively positioned consequent-pole bearingless motor[J]. IEEE Transactions on Industry Applications, 2014, 50(1): 288-295.
[12] Asama J, Kawata R, Tamura T, et al. Reduction of force interference and performance improvement of a consequent-pole bearingless motor[J]. Precision Engineering, 2012, 36(1): 10-18.
[13] 周曉燕, 李琛, 仇志堅(jiān), 等. 基于攝動(dòng)法的交替極永磁電機(jī)偏心磁場(chǎng)解析計(jì)算[J]. 電工技術(shù)學(xué)報(bào), 2013, 28(9): 321-331.
Zhou Xiaoyan, Li Chen, Qiu Zhijian, et al. Magnetic field calculation for consequent-pole motor with rotor eccentricity based on perturbation method[J]. Transactions of China Electrotechnical Society, 2013, 28(9): 321-331.
[14] 李琛, 章躍進(jìn), 仇志堅(jiān). 無(wú)軸承交替極永磁電機(jī)空載氣隙磁場(chǎng)全局解析模型[J]. 電工技術(shù)學(xué)報(bào), 2012, 27(11): 104-110.
Li Chen, Zhang Yuejin, Qiu Zhijian. Exact analytical model for the no-load air-gap magnetic field calculation in consequent-pole permanent magnet bearingless motor[J]. Transactions of China Electro-
technical Society, 2012, 27(11):104-110.
[15] 仇志堅(jiān), 鄧智泉, 章躍進(jìn). 交替極永磁無(wú)軸承電機(jī)的直接懸浮力控制[J]. 電工技術(shù)學(xué)報(bào), 2011, 26(9): 94-99.
Qiu Zhijian, Deng Zhiquan, Zhang Yuejin. Direct levitation force control of a consequent-pole permanent magnet bearingless motor[J]. Transactions of China Electrotechnical Society, 2012, 27(11): 94-99.
Structure of Concentrated Suspension Windings and Its Optimization Design Methods of Bearingless Consequent-Pole Permanent Magnet Motor
1,211
(1. Nanjing University of Aeronautics and Astronautics Nanjing 210016 China 2. Nanjing Institute of Industry Technology Nanjing 210023 China)
In this paper, the influence of structure of concentrated winding on suspension performance is studied at a bearingless consequent-pole permanent magnet motor with 12 slots and 8 poles. Improved concentrated suspension winding structures and the related optimization methods have been studied. Firstly, the reason that a strong coupling exists between radial degrees of freedom is analyzed in two-phase and three-phase conventional concentrated windings. Then, based on the structure of a three-phase improved concentrated suspension winding with sub-coils, a two-phase improved concentrated suspension winding with sub-coils is proposed. To optimize the two types of improved concentrated suspension windings, the optimization method based on suspension force expressions is presented. However, due to its complicated optimization process, a new and simple optimization method based on minimization of total harmonic distortion of suspension magnetic motive force is proposed. Finally, two optimization methods are applied to optimize the two-phase and three-phase improved concentrated suspension windings. Case study verifies the two methods.
Bearingless motor, consequent-pole, winding structure, optimization method, minimization of total harmonic distortion, suspension performance
TM343
丁 強(qiáng) 男,1981年生,博士研究生,研究方向?yàn)闊o(wú)軸承永磁電機(jī)及其控制。
鄧智泉 男,1969年生,教授,博士生導(dǎo)師,研究方向?yàn)闊o(wú)軸承電機(jī)、高速電機(jī)和磁通切換電機(jī)。
2014-07-28 改稿日期 2014-11-24
國(guó)家自然科學(xué)基金資助項(xiàng)目(50977043)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
