基于自動(dòng)剎車與回避轉(zhuǎn)彎的行人主動(dòng)避撞系統(tǒng)
2015-09-23 03:48:28褚韜睿
時(shí)代農(nóng)機(jī) 2015年1期
褚韜睿,馬 鈞
(同濟(jì)大學(xué),上海201804)
行人可以說是最脆弱的交通參與者,行人往往在與車輛碰撞后,又與堅(jiān)硬的水泥路面或其他障礙物發(fā)生二次碰撞,因此受到的傷害極大。根據(jù)2012年世界衛(wèi)生組織發(fā)布的《道路安全全球現(xiàn)狀報(bào)告》,全球每年有127萬人死于道路交通事故,其中46%是行人、自行車或者摩托車駕駛者,發(fā)展中國家死亡率普遍高于發(fā)達(dá)國家,中國為目前每年交通事故死亡人數(shù)最多的國家。
過去的幾年里,人們已經(jīng)逐漸的提高對(duì)行人這一脆弱的交通參與者的關(guān)注度。雖然越來越多的被動(dòng)安全技術(shù)(如安全氣囊、安全帶、吸能車體等減少了碰撞能量沖擊,從而降低了致傷水平,但引發(fā)事故產(chǎn)生的根本原因仍未能得到解決,而且這種安全系統(tǒng)并不能減少行人與路面的二次沖擊。因此,需要加強(qiáng)對(duì)主動(dòng)安全系統(tǒng)的發(fā)展。這套系統(tǒng)應(yīng)該能提前檢測到危險(xiǎn)環(huán)境,使得對(duì)司機(jī)警示與車輛自動(dòng)控制變成可能,在司機(jī)分心或者能見度很差的時(shí)候更能凸顯價(jià)值。
1 主動(dòng)避撞系統(tǒng)發(fā)展現(xiàn)狀
1.1 主動(dòng)避撞系統(tǒng)類型
目前國內(nèi)外研究開發(fā)的汽車主動(dòng)避撞系統(tǒng)主要有以下3種類型:
(1)車輛主動(dòng)避撞報(bào)警CWS(collision warning)系統(tǒng),該系統(tǒng)是為了減輕車輛碰撞危害研發(fā)的,主要工作原理為使用車載雷達(dá)對(duì)前方道路進(jìn)行掃描,對(duì)探測到的行車危險(xiǎn)工況給予警報(bào),但不介入車輛控制。此裝備在一些商用車上已經(jīng)得到了應(yīng)用。
(2)車輛自適應(yīng)巡航控制ACC(adaptive cruise control)系統(tǒng),其主要目的是實(shí)現(xiàn)車與車的主動(dòng)避撞,安裝此系統(tǒng)的車輛可以在路況不是很復(fù)雜的情況下實(shí)現(xiàn)主動(dòng)避撞及巡航控制,已在高檔車型上普遍配置。近年來又衍生出一種基于車車通信的協(xié)同式自適應(yīng)巡航技術(shù)(CACC),該技術(shù)通過車車協(xié)同控制的方法,實(shí)現(xiàn)協(xié)同式隊(duì)列控制。
(3)復(fù)合型車輛智能控制系統(tǒng),該系統(tǒng)針對(duì)復(fù)雜交通情況,特別是市區(qū)交通環(huán)境,采用ACC系統(tǒng)輔以車輛停走(stop-go)系統(tǒng),提高車輛智能控制的實(shí)用性。相對(duì)于ACC系統(tǒng),停走系統(tǒng)由于交通環(huán)境的復(fù)雜和系統(tǒng)對(duì)硬件的要求苛刻,系統(tǒng)實(shí)現(xiàn)的難度更大。
1.2 行人主動(dòng)避撞系統(tǒng)發(fā)展現(xiàn)狀
目前的主動(dòng)避撞系統(tǒng)普遍關(guān)注車車之間,僅有少量汽車公司實(shí)現(xiàn)了車輛與行人之間的主動(dòng)避撞,最大的區(qū)別在于是否能實(shí)現(xiàn)行人的檢測。
2009年寶馬公司在7系轎車上首先配備了可實(shí)現(xiàn)行人并高亮的夜視輔助系統(tǒng),它主要利用紅外線技術(shù)感應(yīng)人體熱量。2012年沃爾沃公司為S60轎車配備了帶完全主動(dòng)剎車的行人主動(dòng)避撞系統(tǒng),該系統(tǒng)使用雷達(dá)以及車載攝影機(jī)進(jìn)行環(huán)境識(shí)別,能辨識(shí)身高超過80cm的人體輪廓。如果物體出現(xiàn)在碰撞路線上,前擋風(fēng)玻璃上的一個(gè)紅燈就會(huì)亮起,在必要時(shí)會(huì)通過聲音警告駕駛者、同時(shí)預(yù)先加壓剎車。若駕駛?cè)藳]有反應(yīng),且碰撞即將發(fā)生,系統(tǒng)就會(huì)自動(dòng)全力剎車,時(shí)速在30km/h以下時(shí),系統(tǒng)可讓車輛完全停下。
然而,以上系統(tǒng)在汽車以較高速度(>30km/h)行駛時(shí)表現(xiàn)較差,且僅能以自動(dòng)剎車介入車輛控制,無法實(shí)現(xiàn)回避轉(zhuǎn)向操作,圖像識(shí)別速度、準(zhǔn)確度及可靠性均有待提高。
1.3 行人主動(dòng)避撞系統(tǒng)總體方案設(shè)計(jì)
文章中的行人主動(dòng)避撞系統(tǒng)利用現(xiàn)代信息技術(shù)、傳感技術(shù)來擴(kuò)展駕駛員的感知能力,將感知技術(shù)獲取的行駛環(huán)境信息(如行人或其他障礙物距離等)傳遞給駕駛員,同時(shí)綜合分析路況與車況,辨識(shí)是否存在安全隱患,并在緊急情況下,自動(dòng)采取措施控制汽車,包括自動(dòng)剎車及回避轉(zhuǎn)向,使汽車能夠主動(dòng)規(guī)避碰撞危險(xiǎn),保證車輛安全行駛,從根源上提高行人安全。
行人主動(dòng)避撞系統(tǒng)工作過程如下:
(1)當(dāng)車輛正常行駛時(shí),系統(tǒng)采取碰撞時(shí)間或者安全距離模型,實(shí)時(shí)對(duì)車輛行駛安全程度進(jìn)行計(jì)算。如判斷為安全狀態(tài),系統(tǒng)無任何動(dòng)作,同時(shí)駕駛員可以隨時(shí)選取當(dāng)前環(huán)境的模式進(jìn)行車輛自動(dòng)控制。
(2)當(dāng)系統(tǒng)判斷為危險(xiǎn)狀態(tài)時(shí),行人主動(dòng)安全避撞系統(tǒng)會(huì)首先自動(dòng)關(guān)閉油門,此時(shí)若駕駛員尚未采取相應(yīng)操作,則系統(tǒng)將介入車輛控制,自動(dòng)執(zhí)行剎車和回避轉(zhuǎn)向,并調(diào)用其他相關(guān)控制系統(tǒng)(如ABS、ESP等)使車輛遠(yuǎn)離危險(xiǎn)同時(shí)保證自車安全,一旦車輛回到安全狀態(tài)或駕駛員采取相應(yīng)操作,則解除對(duì)車輛的自動(dòng)控制,回歸正常行駛狀態(tài)。
(3)當(dāng)系統(tǒng)判斷為危險(xiǎn)無法避讓時(shí),除采取遠(yuǎn)離和減少危險(xiǎn)的控制外,還將根據(jù)危險(xiǎn)程度的大小和障礙物類型(行人、車輛或其他障礙)調(diào)用合適的被動(dòng)安全控制策略(如安全氣囊等)。
因此,文章中的汽車主動(dòng)避撞系統(tǒng)由行人檢測、環(huán)境分析、策略制定及車輛控制系統(tǒng)構(gòu)成。
2 基于立體視覺技術(shù)的行人檢測系統(tǒng)
行人主動(dòng)避撞系統(tǒng)的行人檢測技術(shù)是基于運(yùn)動(dòng)的攝像機(jī),因此很難對(duì)動(dòng)態(tài)背景進(jìn)行建模,無法利用幀間的變化信息,因此主要的研究方法是將行人檢測看作是模式識(shí)別問題,首先從靜態(tài)單幅圖像中提取行人特征,然后進(jìn)行模式分類。分類方法可以按照?qǐng)D像來源(動(dòng)態(tài)/靜態(tài)),顏色信息(彩色/灰度),圖像背景(復(fù)雜背景/簡單背景),感光光譜范圍(可見光/紅外線)等方法。由于真實(shí)場景中行人受到光照、遮擋、穿著、人體姿態(tài)和復(fù)雜背影的諸多因素影響,通常要將多種檢測技術(shù)綜合起來。
2.1 單幀行人識(shí)別系統(tǒng)Single-Frame Pedestrian Recogni ti on(PedRec)
利用文獻(xiàn)描述的滑動(dòng)窗口技術(shù)可以產(chǎn)生原始感興趣區(qū)域(ROIs)。被立體視覺所捕獲的深度圖像,是由關(guān)聯(lián)最多行人的窗口掃描到的,同時(shí)后者要考慮適當(dāng)?shù)奈恢霉睿ū热畿囕v間距等)。當(dāng)特征數(shù)超過一定比例的窗口面積時(shí)其位置會(huì)被添加到后續(xù)的ROI列表中以便進(jìn)行目標(biāo)分類。目標(biāo)分類目前廣泛采用梯度方向的直方圖特征與SVM分類器結(jié)合的方法。雷達(dá)與移動(dòng)攝像機(jī)在接近相同位置時(shí)均會(huì)相應(yīng),對(duì)探測到的包圍盒進(jìn)行基于置信度的非極大值抑制,數(shù)值范圍是由包圍盒的正交覆蓋范圍決定的。兩套系統(tǒng)的檢測信號(hào)ai與aj受制于非極值抑制,它們的覆蓋范圍為
圖像中的行人檢測距離是通過立體像稠密度圖像來計(jì)算的。由于無法得到準(zhǔn)確的行人輪廓,在使用概率密度函數(shù)深度估算過程中,所有的可能的行人輪廓均要考慮到,圖片1說明了深度估算過程。在給定的包圍盒深度圖像中,行人距離是通過概率密度函數(shù)進(jìn)行加權(quán)平均的。行人的3D位置是由穿過包圍盒中心與估算的包圍盒距離的逆投影垂直線得到的。探測到的行人3D位置會(huì)被傳到融合模塊。
2.2 運(yùn)動(dòng)目標(biāo)檢測(6D視覺)
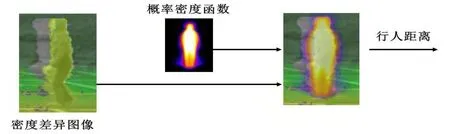
圖1 立體像稠密度概率密度函數(shù)得到的加權(quán)行人距離平均值即為估算的行人距離
當(dāng)使用立體攝像機(jī)時(shí),探測到的場景3D結(jié)構(gòu)可以立即由立體算法得到。通常為了識(shí)別單個(gè)物體,這些信息會(huì)由一種網(wǎng)狀結(jié)構(gòu)積累,緊接著進(jìn)行連接組件分析。為了捕獲被識(shí)別物體的動(dòng)作,目標(biāo)物體隨后會(huì)被追蹤,速度由濾波器決定。這種標(biāo)準(zhǔn)方法的缺點(diǎn)是探測性能將很大程度上由分類器的準(zhǔn)確性決定,尤其是移動(dòng)物體接近靜止物體時(shí)。例如,在靜止車輛后面的移動(dòng)行人經(jīng)常突然出現(xiàn),他們很難被快速探測到。
為了解決這個(gè)問題提,文獻(xiàn)[4]中提出探測不僅要以立體圖像信息為中心,同時(shí)還要兼顧3D移動(dòng)領(lǐng)域。3D移動(dòng)領(lǐng)域的重建是由所謂的6D立體視覺算法進(jìn)行的。其中最基本的思想便是從已知的深度立體視覺圖像中尋找兩個(gè)或者更多的連續(xù)幀,使用卡爾曼濾波器(Kalman Filter)融合時(shí)間與空間信息。其結(jié)果便是同時(shí)得到一個(gè)精度改進(jìn)的3D運(yùn)動(dòng)模型以及對(duì)該模型像點(diǎn)的估算。這種融合體現(xiàn)了對(duì)觀察者動(dòng)作的認(rèn)識(shí),被叫做自身運(yùn)動(dòng)。它是基于卡爾曼濾波器的方法,由探測的靜止相點(diǎn)估算所得。然而,其他方法,比如文獻(xiàn)提到的方法也可以很容易被集成。
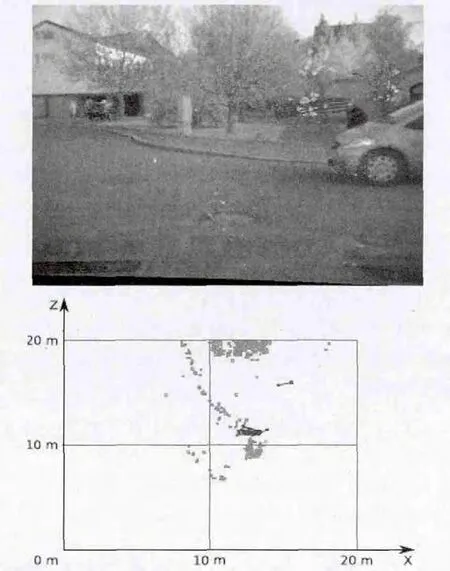
圖2,6D模型算法的計(jì)算結(jié)果箭頭在0.5s內(nèi)指向了計(jì)算的3D模型位置,投影出圖像。顏色編碼的絕對(duì)速度:靜態(tài)的點(diǎn)會(huì)被編碼成綠色,以4:0m/s以上的速度移動(dòng)的點(diǎn)則會(huì)被編碼成紅色。
在目前的設(shè)置中,圖像點(diǎn)是由KLT追蹤器追蹤的,它提供了次級(jí)像素精度并且可以有效的追蹤長序列圖像點(diǎn)。這是一種對(duì)速度的優(yōu)化,可以允許基于完整的目標(biāo)探測模塊來實(shí)時(shí)分析總數(shù)多達(dá)5000個(gè)的像素點(diǎn)(25fps)。立體視覺的計(jì)算是由基于半球匹配算法的硬件來執(zhí)行的。事實(shí)上,任何類似的光流立體算法在這里都可以被使用。
圖片3展示了6D立體視覺的預(yù)估距離。在這里,不到0.5s時(shí)間內(nèi),箭頭便可以從當(dāng)前的3D模型指向預(yù)估的3D模型。從右側(cè)圖片中的鳥瞰圖像可以看出,移動(dòng)行人很容易與靜止的車輛里區(qū)別開。
目標(biāo)對(duì)象可以被識(shí)別為一組連續(xù)的運(yùn)動(dòng)矢量。既然6D模型算法不僅能提供它們的狀態(tài)估計(jì),還能提供他們的不確定性。Mahalanobis距離模型[8]可以在聚類分析中進(jìn)行相似性度量。
2.3 運(yùn)動(dòng)目標(biāo)檢測(6D視覺)與單幀行人識(shí)別系統(tǒng)(PedRec)融合
對(duì)行人運(yùn)動(dòng)進(jìn)行準(zhǔn)確預(yù)測,位置和速度信息是至關(guān)重要的。使用卡曼濾波器可以將6D視覺模型與PedRec模塊的輸入進(jìn)行融合,濾波器的狀態(tài)S可以表示為以下公式:S=[xyvxvy]T
其中x/y是行人位置與車輛的橫/縱向相對(duì)距離,與為車輛的橫/縱向絕對(duì)速度。矢量的測量則同時(shí)關(guān)聯(lián)到6D視覺模型與PedRec模塊,公式如下:
其中x/y與/為上文定義的不同測量值的狀態(tài)變量(從狀態(tài)到變量的映射是無關(guān)緊要的)。因此通過以上連續(xù)的改進(jìn)可以將來自兩個(gè)不同模塊中的當(dāng)前測量值集成到濾波器內(nèi)。
我們假設(shè)一個(gè)恒定的行人移動(dòng)速度(行人加速度可以通過狀態(tài)噪聲協(xié)方差建模得到)。過渡矩陣F如下:

其中T是攝像機(jī)的的循環(huán)時(shí)間(40ms)。
車輛的自身運(yùn)動(dòng)在卡曼濾波器的預(yù)測階段會(huì)進(jìn)行補(bǔ)償。“自行車”模型是一種假設(shè)在兩個(gè)測量點(diǎn)之間帶有連續(xù)轉(zhuǎn)向角與速度的運(yùn)動(dòng)模型,它可以實(shí)現(xiàn)對(duì)目標(biāo)物體與車輛之間的轉(zhuǎn)換。所需的對(duì)自身運(yùn)動(dòng)所補(bǔ)償?shù)乃俣燃皺M擺角速度數(shù)據(jù)可以通過一個(gè)攝像機(jī)循環(huán)周期內(nèi)的車載傳感器數(shù)據(jù)得到。
可以采用全局域最近鄰(GNN)數(shù)據(jù)算法與之前的目標(biāo)物體矩陣測量航跡關(guān)聯(lián)。預(yù)測狀態(tài)與測量值之間的Mahalanobis距離可以作為航跡關(guān)聯(lián)值。對(duì)于行人檢測來說,這意味著行人位置是用來測量航跡關(guān)聯(lián)的,而對(duì)6D視覺模型來說,速度則是額外使用的。
航跡的開始和結(jié)束可以利用航跡的關(guān)聯(lián)分析次數(shù)來控制。當(dāng)使用不能被分配到現(xiàn)有航跡的測量值時(shí),便會(huì)產(chǎn)生新的航跡。為了抑制雜散信號(hào)檢測,航跡會(huì)在隱藏階段開始。假設(shè)在進(jìn)入確認(rèn)狀態(tài)時(shí)分配到的航跡測量數(shù)為n,這里我們?nèi)=2,這意味著兩個(gè)模塊的探測會(huì)同時(shí)直接引起一個(gè)確認(rèn)的行人航跡。只有被分配的行人探測航跡可以被標(biāo)記為有效。對(duì)于所有航跡來說,它們的狀態(tài)會(huì)隨著時(shí)間改變,并且會(huì)被保留,包括航跡關(guān)聯(lián)的測量值。
兩種模塊會(huì)在不同的循環(huán)周期獨(dú)立工作。6D視覺模塊會(huì)在固定的攝像機(jī)循環(huán)時(shí)間內(nèi)運(yùn)轉(zhuǎn)(25 fps)。PedRec模塊的處理時(shí)間會(huì)根據(jù)現(xiàn)場復(fù)雜度來決定,極值更低,約為15fps。測量值擁有共同的時(shí)間戳,是由已經(jīng)生成圖像的幀標(biāo)記定義的。當(dāng)測量值不在序列范圍內(nèi)并且不能再普通的濾波器狀態(tài)下集成時(shí),航跡歷史記錄便可以用來檢查過去航跡關(guān)聯(lián)的測量值。可能的分配引起了關(guān)聯(lián)信息的升級(jí)。盡管當(dāng)測量值超出序列范圍時(shí),濾波器狀態(tài)不會(huì)進(jìn)行更新,但是更新的關(guān)聯(lián)信息會(huì)反映航跡的管理狀態(tài),這便允許航跡進(jìn)入確認(rèn)階段。另外,對(duì)PedRec系統(tǒng)進(jìn)行關(guān)聯(lián)分析會(huì)得到驗(yàn)證過的行人航跡。
卡爾曼濾波器的初始狀態(tài)來自首次測量。如果航跡是由行人檢測引起的,系統(tǒng)速度便會(huì)被設(shè)為0。如果初始化的行人檢測跟蹤狀態(tài)速度設(shè)置為0,而6D視覺模型則使用測量的速度作為初始值。
最后,位置速度以及追蹤行人的程度等數(shù)據(jù)會(huì)傳輸?shù)江h(huán)境分析模塊。
3 環(huán)境分析、策略決策及車輛控制系統(tǒng)
情景分析與車輛控制系統(tǒng)是駕駛員輔助系統(tǒng)的組成部分,可以產(chǎn)生對(duì)行駛環(huán)境的計(jì)算機(jī)層次的理解(基于前文描述的傳感器信息)并采取適當(dāng)?shù)男袆?dòng)。如圖所示描述了軌跡生成、環(huán)境分析、決策&干預(yù)與車輛控制模塊之間的關(guān)系。
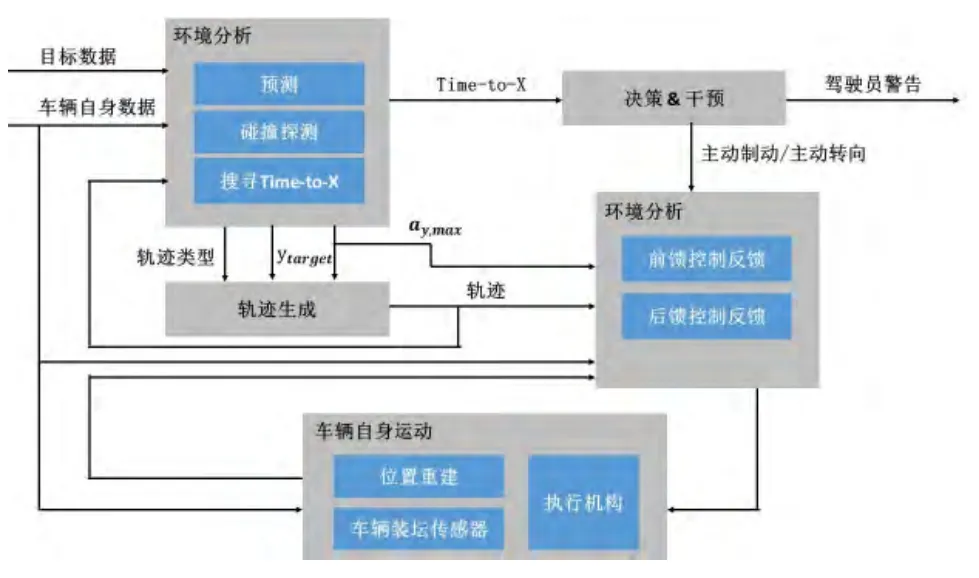
圖3 環(huán)境分析與車輛控制模塊結(jié)構(gòu)
環(huán)境分析模塊預(yù)測了當(dāng)前的駕駛環(huán)境將如何變化并自動(dòng)計(jì)算其臨界措施,比如碰撞時(shí)間、轉(zhuǎn)向時(shí)間以及制動(dòng)時(shí)間。臨界評(píng)估是策略決策的基礎(chǔ)模塊,可以為避免碰撞與減少碰撞傷害采取合適的規(guī)避方法。這種方法是根據(jù)專門的車輛控制器來實(shí)現(xiàn)。由于車輛控制模塊與環(huán)境分析模塊均依賴于規(guī)避方法的現(xiàn)實(shí)模型的準(zhǔn)確性,它們自然是緊密關(guān)聯(lián)的。這提供了一個(gè)軌跡生成模塊,以下部分將更加詳細(xì)地討論以上模塊。
3.1 軌跡生成模塊
軌跡生成具有雙重目的。
首先,生成的軌跡可以提供準(zhǔn)確的回避轉(zhuǎn)向模型,它可以滿足以下要求:由于規(guī)避而產(chǎn)生的軌跡應(yīng)該盡可能的舒適,可行(即由自身車輛決定),并且還會(huì)在采取自動(dòng)規(guī)避措施時(shí)引起很小的側(cè)滑,起到安全緩沖的作用。當(dāng)然,搶奪方向盤控制權(quán)極其危險(xiǎn),必須避免。
第二,生成的軌跡為橫向控制提供了輸入變量,如橫向偏航角,偏航率。在研究了不同的軌跡類型后,文獻(xiàn)提出的基于多項(xiàng)式方法的sigmoidal函數(shù)被用作自動(dòng)回避操作的模型。
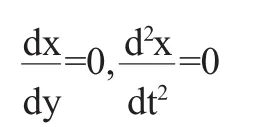
人們提出了7次多項(xiàng)式規(guī)避路徑模型:

其中ytrj為橫向偏移量期望,x為距規(guī)避初始點(diǎn)的縱向偏移量,這樣便滿足了舒適性與可行性的要求。為了滿足這些指標(biāo),bi的多項(xiàng)式系數(shù)確定是基于幾個(gè)約束方程限制的最大橫向加速度aymax確定的,從而分別衍生出橫向偏移和曲率。
Dev表示完成規(guī)避操作所需的距離,ytarget表示目標(biāo)與規(guī)避起始點(diǎn)的縱向偏移距離。
為了推導(dǎo)公式(2)中的多項(xiàng)式系數(shù)bi,我們采取以下的邊界條件:
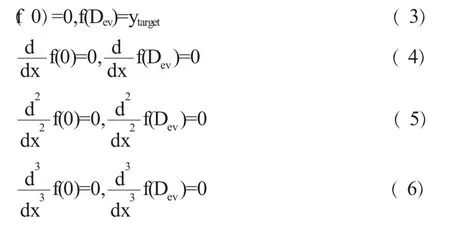
為了確保規(guī)避路徑y(tǒng)tj滿足我們關(guān)于舒適性與可行性的要求,我們需要確定車輛的橫向加速度在可以預(yù)先確定的范圍內(nèi):

進(jìn)行模型簡化,假設(shè)在執(zhí)行規(guī)避操作時(shí),車輛在x軸的運(yùn)動(dòng)是連續(xù)的,則:
因此公式(7)可以簡化為:

其中是位置的極值,所以:

公式式(3-6)與(8-9)構(gòu)成了一個(gè)擁有十個(gè)方程的方程組,可以解出8個(gè)多項(xiàng)式的系數(shù)b0…b7,規(guī)避長度Dev以及極值位置。
規(guī)避時(shí)間可以基于連續(xù)的車速v求得:

其中K≈2.741,是一個(gè)常數(shù)系數(shù)的多項(xiàng)式,從上面的定義中計(jì)算可以得到。
基于多項(xiàng)式函數(shù)和車輛速度v的測量,重要的輸入變量(橫向偏移量、曲率、航向角)可以在每一個(gè)采樣時(shí)間步內(nèi)確定,如圖4所示。
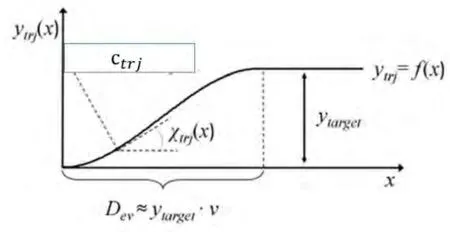
圖4 規(guī)避路徑中的橫向控制輸入
3.2 環(huán)境分析模塊
對(duì)碰撞風(fēng)險(xiǎn)的評(píng)估涉及到臨界參數(shù)比如Time—To—Brake(TTB),Time—To—Steer(TTS)等。
在文章中,TTB與TTC分別用于通過制動(dòng)和轉(zhuǎn)向觸發(fā)自動(dòng)避撞系統(tǒng)。因此,有兩套重要的Time—to—x計(jì)算標(biāo)準(zhǔn)。
首先,回避轉(zhuǎn)向方法一般在車輛以最大橫向加速度在彎道上行駛時(shí)使用,這里我們采用在3.1中定義的更加現(xiàn)實(shí)的轉(zhuǎn)彎方法。
其次,如果TTS用來評(píng)估系統(tǒng)避免轉(zhuǎn)彎時(shí)相撞能力,我們必須考慮多個(gè)相關(guān)對(duì)象。這意味著該算法不僅需要找出在行人駕駛路徑內(nèi)最新的避撞轉(zhuǎn)向方法,同時(shí)還要保證應(yīng)急方法不會(huì)導(dǎo)致車輛與場景中的任何偵測對(duì)象發(fā)生碰撞。(比如汽車、行人,這種自由空間的傳感器將作為未來此研究方向的重點(diǎn))。為了滿足這些需求,我們采用了數(shù)值模擬方法,可以對(duì)Time—to—X參數(shù)高效、實(shí)時(shí)地進(jìn)行計(jì)算,甚至可以應(yīng)用于更復(fù)雜的自動(dòng)控制動(dòng)作。此外,這種數(shù)值方法可以驗(yàn)證回避轉(zhuǎn)彎的避撞方式是否可以在沒有碰撞的情況下執(zhí)行。
正如圖片3中描述的那樣,數(shù)值模擬方法由3個(gè)部分組成:預(yù)測、碰撞檢測和Time—to—X搜索。在預(yù)測階段中,可以計(jì)算出一系列未來潛在的自身車輛和其他目標(biāo)的狀態(tài):

其中tk是預(yù)測階段k-th的時(shí)間戳,K是預(yù)測區(qū)間。Zego,k是車輛自身位置和在時(shí)間時(shí)所處位置的矢量,并且,Z1obj,k…,ZMobj,k這些數(shù)據(jù)是由文章2.3介紹的傳感器提供的,主要是目標(biāo)M的位置和運(yùn)動(dòng)信息。為了獲得這些預(yù)測,我們將針對(duì)目標(biāo)與車輛自身采用合適的運(yùn)動(dòng)模塊,因此可以假設(shè)它們未來的行為。
鑒于預(yù)測的狀態(tài),我們可以分別交叉分析由Zego,k與Z1obj,k…,ZMobj,k引起的位置變化,進(jìn)而識(shí)別出系統(tǒng)車輛與場景中的所有目標(biāo)之間潛在的碰撞危險(xiǎn)。一旦檢測到了碰撞,我們將采用最新的避撞方法。
因此,我們定義了兩種緊急操縱,分別代表了文章3.1部分的最大制動(dòng)減速度與轉(zhuǎn)向減速度,數(shù)值為-10m/s2。 公式(11)中每組數(shù)據(jù)(tk,Zegok)均構(gòu)成了一個(gè)潛在的緊急自動(dòng)操作的起始點(diǎn)。使用二進(jìn)制搜索方法,我們可以找到最新的時(shí)間步長,在此步長內(nèi)制動(dòng)或轉(zhuǎn)向動(dòng)作不會(huì)觸發(fā)任何與場景中的對(duì)象碰撞現(xiàn)象。這些時(shí)間步長是離散的TTB與TTS測量值。
3.3 決策&干預(yù)模塊
“決策與干預(yù)”模塊是駕駛輔助系統(tǒng)的核心,因?yàn)樗P(guān)聯(lián)了駕駛員行為與上文中提到的函數(shù)模型。由于行人在事故中受傷的風(fēng)險(xiǎn)很高,避免碰撞是此函數(shù)模型的首要目的。為了確定最好的方式來支持司機(jī),有必要去了解駕駛員當(dāng)前的駕駛意圖。駕駛員監(jiān)控算法利用了車輛系統(tǒng)信號(hào),比如油門與剎車踏板的位置,速度、縱向與橫向加速度、轉(zhuǎn)向角和轉(zhuǎn)向率來判斷當(dāng)前的司機(jī)駕駛行為。如果駕駛員對(duì)危險(xiǎn)情況反映不恰當(dāng),系統(tǒng)會(huì)提供可選的聲學(xué)警告,提醒他自己回避碰撞。在一個(gè)函數(shù)中,干預(yù)機(jī)制是必要的,為了避免碰撞,全力制動(dòng)需要優(yōu)先于回避碰撞操作。當(dāng)TTB=0時(shí),全力制動(dòng)機(jī)制會(huì)被觸發(fā),駕駛員既不能進(jìn)行加速也不能進(jìn)行規(guī)避轉(zhuǎn)彎。如果全力制動(dòng)不能避免碰撞(TTB<0),回避轉(zhuǎn)彎機(jī)制將會(huì)在TTS=0的時(shí)候被激活,提供行駛環(huán)境分析計(jì)算,進(jìn)而執(zhí)行回避轉(zhuǎn)彎以避免碰撞。車輛的回避操作系統(tǒng)利用車輛控制系統(tǒng)來計(jì)算必須的轉(zhuǎn)彎轉(zhuǎn)矩。當(dāng)完成回避轉(zhuǎn)彎時(shí),轉(zhuǎn)彎力矩便會(huì)按照斜坡函數(shù)變化。車輛的自動(dòng)回避操作結(jié)束后,會(huì)固定橫向偏移80~100cm。為了防止碰撞,將不會(huì)允許自由地進(jìn)行回避轉(zhuǎn)彎,也就是說當(dāng)檢測到迎面而來的目標(biāo)時(shí),將會(huì)執(zhí)行制動(dòng)操作(碰撞緩沖)。
該功能的原型設(shè)計(jì)試圖允許駕駛員在任何時(shí)間否決回避轉(zhuǎn)彎介入。如果駕駛員手握方向盤,他將削弱或者抑制轉(zhuǎn)向系統(tǒng)。明顯的油門與剎車踏板操作將會(huì)立即取消車輛回避轉(zhuǎn)彎介入。類似的退出條件在全自動(dòng)剎車時(shí)也存在。
為了減少安全系統(tǒng)自動(dòng)介入控制車輛時(shí)引起動(dòng)態(tài)誤差,該功能將會(huì)控制電動(dòng)可逆式安全帶拉緊,還會(huì)使側(cè)門的空氣坐墊與靠背氣墊膨脹。當(dāng)系統(tǒng)完成干預(yù)操作時(shí),安全帶將會(huì)放松,側(cè)門的空氣坐墊與靠背氣墊將會(huì)回到原來的位置。
3.4 車輛控制系統(tǒng)
車輛控制系統(tǒng)由兩部分構(gòu)成:縱向控制自動(dòng)制動(dòng)以及橫向控制回避轉(zhuǎn)彎。當(dāng)TTB=0s的時(shí)候,縱向的車輛控制器會(huì)設(shè)置最大減速度-10m/s2。而為了規(guī)避轉(zhuǎn)彎的橫向系統(tǒng)更為復(fù)雜,將在以下部分進(jìn)行討論。
橫向轉(zhuǎn)彎的自動(dòng)規(guī)避機(jī)制需要自身車輛高度動(dòng)態(tài)的橫向運(yùn)動(dòng)(這里,橫向運(yùn)動(dòng)指垂直于行駛車道的運(yùn)動(dòng)),這種方法的橫向動(dòng)力學(xué)加速度是非線性的。一般來說,在本文3.1部分中定義的橫向偏移量可能會(huì)依據(jù)障礙的大小,變化范圍從只有幾厘米完整車道。它的速度、可用的自由空間將均用于規(guī)避操作。在這里,對(duì)行人的回避轉(zhuǎn)彎簡化為一個(gè)固定的偏移量。
通過轉(zhuǎn)彎來避免碰撞需要系統(tǒng)對(duì)自身車輛橫向運(yùn)動(dòng)的精確控制。正如公式(2)中研究的實(shí)際車輛那樣,控制器將會(huì)永久與規(guī)避操作的參考位置進(jìn)行對(duì)比,,因此需要對(duì)自身車輛位置有準(zhǔn)確、可靠的感知。
對(duì)于如今的汽車來說,車輛的位置是根據(jù)里程表和慣性傳感器重新設(shè)置并且保持穩(wěn)定性的。當(dāng)使用測量的橫向加速度時(shí)以及速度v(或者選擇當(dāng)前的偏航率),車輛的航向角可以用如下公式表示。
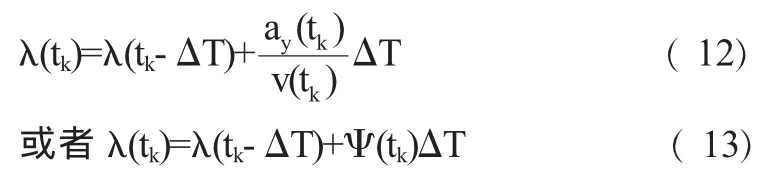
這里,表示了采樣的時(shí)間步長以及表示k階迭代步驟的時(shí)間戳。根據(jù)上文得到的與測量速度v,積分計(jì)算可以得到相對(duì)于當(dāng)前車道的縱向位置x與橫向位置y。

為了解釋這種規(guī)避機(jī)制的非線性橫向動(dòng)力學(xué),人們使用了結(jié)合前反饋與后反饋的控制策略。橫向輸送的控制策略。橫向控制的命令信號(hào)u分別包括前反饋系統(tǒng)部分的uff與后反饋系統(tǒng)的部分ufb。uff由多項(xiàng)式(2)中的曲率Ctrj計(jì)算得出,ufb則由狀態(tài)控制器的四階狀態(tài)向量解出。其中,yerr=ytrj-y表示橫向參考值與重新搭建的重塑后位置的橫向誤差。λerr=λtrj-λj表明了在橫向位置和重建位置的偏航角誤差。
由于車輛控制系統(tǒng)的非線性行為,人們采用了增益調(diào)度方法,可以同時(shí)使用前反饋增益系數(shù)Kff和后反饋增益系數(shù)Kjb,適用于當(dāng)前速度和最大橫向加速度ay,max。詳細(xì)信息可以在文獻(xiàn)中找到。
4 結(jié)語
文章闡述了一種全新的行人主動(dòng)避撞系統(tǒng),它包括行人檢測、環(huán)境分析、策略制定與車輛控制系統(tǒng)。行人檢測系統(tǒng)融合了兩種互補(bǔ)的檢測模式:單幀行人識(shí)別與運(yùn)動(dòng)目標(biāo)檢測;環(huán)境分析系統(tǒng)則建立在數(shù)據(jù)模擬的基礎(chǔ)上,這種模擬利用了多項(xiàng)式模型,可以計(jì)算更復(fù)雜以及開放的車輛路徑。策略制定涉及到監(jiān)測連續(xù)的碰撞時(shí)間、剎車時(shí)間與轉(zhuǎn)向時(shí)間的測量值,并且關(guān)于轉(zhuǎn)向規(guī)避機(jī)制,進(jìn)行了專門的優(yōu)化。
[1]D.M.Gavrila and S.Munder,“Multi-cue pedestrian detection and tracking from a moving vehicle,”IJCV,vol.73,no.1,pp.4159,2007.
[2]N.Dalal and B.Triggs,“Histograms of oriented gradients for humandetection,”in Proc.of the IEEE CVPR,vol.1,2005,pp.886893.
[3]U.Franke and A.Joos,“Real-time stereo vision for urban traffic sceneunderstanding,”in Proc.of the IEEE IV,October 2000,pp.273~278
[4]U.Franke,C.Rabe,H.Badino,and S.Gehrig,“6d-vision:Fusion of stereo and motion for robust environment perception,”in Proc.of the DAGM,2005,pp.216;223.
[5]H.Badino,“A robust approach for ego-motion estimation using a mobile stereo platform,”in 1st Int.Workshop on Complex Motion(IWCM04),Guenzburg,Germany,October 2004.
[6]C.Tomasi and T.Kanade,“Detection and tracking of point features,”Tech.Rep.CMU-CS-91-132,1991.
[7]H.Hirschmueller,“Accurate and efficient stereo processing by semiglobal matching and mutual information,”in Proc.of the IEEE CVPR,vol.2,June 2005,pp.807;814.
[8]Mahalanobis,Prasanta Chandra(1936)."On the generalised distance in statistics".Proceedings of the National Institute of Sciences of India 2(1):49–55.Retrieved 2012-05-03.
[9]U.Kiencke and L.Nielsen,Automotive Control Systems:For Engine,Driveline and Vehicle.Springer-Verlag,2000.
[10]H.Fritz,“Vorrichtung zur Durchf¨uhrung eines Fahrspurwechsels.”German Patent DE 100 12 737 B4,2001.
[11]“Verfahren und Vorrichtung zur Kollisionsvermeidung f¨ur ein Fahrzeug durch Ausweichen vor einem Hindernis.German Patent Disclosure DE 10 2009 020 648 A1,”German Patent,2009.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
