自動化過程控制對PID控制方法的應用及其參數整定策略
2015-09-22 06:36:24劉曉霞孫康波
電氣開關 2015年1期
劉曉霞,孫康波
(沈陽理工大學裝備工程學院,遼寧 沈陽 110000)
1 引言
在工業過程控制中,大于95%的控制回路有PID結構,PID這種控制方法之所以得以廣泛使用在于其結構簡單,在具體應用過程中已被理解、實現,很多高級控制均將PID控制當作基礎。科學設計PID參數能讓工藝參數控制的更加平穩,預防液位控制系統抽空、壓力控制系統安全閥起跳、溫度控制系統過大降低產品質量[1]。同時,在確保生產安全、產品質量的條件下還可起到節約能耗的效果。
2 PID控制方法的應用
PID控制實質上包括PI控制與PD控制兩部分,PID控制器主要依照系統誤差,借助微分、積分及比例計算所得控制量實施控制,確保自動控制體系在受到干擾情況下也可平穩運行。在連續一段時間內PID控制系統情況如圖1所示。
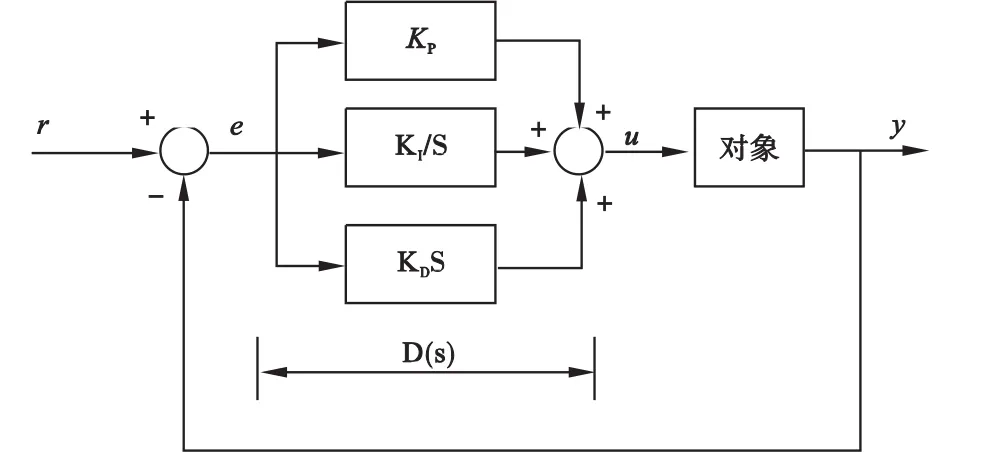
圖1 PID控制系統
在具體應用過程中,可依照受控對象的特點、控制功用要求而選用合適的控制組合,形成①比例(P)控制器:u(t)=Kpe(t);②比例+積分(PI)控制器:u(t)③ 比例 +積分 +微分(PID)控制器:
在上述公式中,KP表示比例放大系數,數值為100/P,T1表示積分時間,TD表示微分時間。比例控制可以快速反映誤差,進一步縮小穩態誤差,但其不能從根本上消除穩態誤差。若比例放大系數增大,可導致系統不穩定。積分控制主要作用在于若系統存在誤差,積分控制器不斷積累,輸出控制量,進一步消除誤差。故只要時間充足,積分控制會徹底消除誤差,促使系統誤差變成0,進一步消除穩態誤差[2]。若積分作用過于強大將加大系統超調,重則導致系統發生振蕩。相比之下,微分控制能夠縮小超調量,有效改變振蕩,提升系統穩定性能,同時提升系統的動態響應速度,減少調整時間,從整體改善系統動態作用。
2 PID參數整定策略
2.1 衰減曲線方法
這種方法主要通過系統產生衰減振蕩進一步整定控制器參數數值的,在閉環控制體系中,需將控制器轉變成純比例功能,將比例度預置為較大數值。當維持穩定以后,用改變給定數值的辦法添加階躍干擾,并認真觀察被控制變量記錄曲線的衰減比例,從大至小逐漸改變比例程度,直到變成4∶1的衰減比例,記錄下此時比例度,即可從曲線上得出衰減周期[3]。參照下表1的經驗公式,可得出控制器參數整定數值。(注釋:部分過程依照4∶1衰減比例振蕩太強,故可依照10∶1衰減曲線方法)。

表1
2.2 臨界比例度方法
這種方法依據試驗取得臨界比例度、臨界周期,再憑借經驗總結出的關系得出控制器各項參數數值。具體操作步驟:在閉環控制體系中,先把控制器轉變成純比例功能,把積分時間變為無限大,微分時間定為0,在干擾條件下,從大至小一步一步改變控制器比例度,直到系統發生臨界振蕩,將此時的比例度稱作臨界比例度,記作δk,臨界振蕩周期記作Tk,參照表2得出控制器參數整定各項數值。

表2
2.3 經驗試湊方法
這種方法是在長時間生產實踐過程中形成的整定方法,依照經驗先把控制器參數放在一個數值中,然后在閉環控制體系中,促使給定數值發生一定改變而產生干擾,在記錄觀察所得過渡過程曲線的基礎上,將δ、T1、TD對于過渡過程的影響當作指導,依據規定流程,分別整定比例度、積分時間與微分時間,直至達到理想的過渡過程[4,5]。具體整定步驟有兩種:①憑借存比例功能實施試湊、若過渡過程保持大體穩定且符合相關要求,通過積分功能消除余差,再添加微分功能提升控制質量,依照此流程仔細觀察過渡過程曲線后開始整定;②依照下表中給定范圍確定T1,若引入微分功能,則TD定義在(1/3~1/4)T1范圍內,再對實施試湊。(注釋:溫度對象容量滯后很大,當參數受到干擾以后變化速度越來越慢,δ變小,T1增長,通常需加入微分)。

表3
經驗試湊方法十分簡單,適合用在各種控制體系內,其應用領域十分廣泛,但是這種方法主要憑借經驗,若缺乏豐富的經驗或者過渡過程速度緩慢時,比較浪費時間,可用優選方法,但確保每次參數改變的大小、方向均有一定目的性。需要特別注意的一點:在同一個系統中,不同人用經驗試湊法整定,得出的參數數值不同,這是因為每個人對每條曲線的看法存在很大差異,且無一個確切的評定標準,不同的參數進行匹配可能導致過渡過程衰減情形非常相近。
3 參數整定比較
衰減曲線方法對干擾平十分頻繁,且記錄曲線不規范,時常出現小擺動,加之很難得出準確的衰減比例度、衰減周期,故這種方法很難廣泛應用。臨界比例度方法不適宜用在臨界比例度較小的體系中,由于臨界比例度較小,控制器輸出情況可能發生較大變化,被調參數極易超出規定范圍,對正常生產運行帶來一定的影響[6]。臨界比例度方法需要確保系統處于等幅度振蕩狀態,才能得出δk、Tk,針對工藝方面不能形成等幅度振蕩的系統,這種方法不適宜用。經驗試湊方法在外界干擾功能較頻繁,記錄曲線不規范的控制體系中應用十分合適。先用存比例實施試湊,若P=15,則提示過渡過程大體穩定且符合相關要求,若將比例控制在合適范圍內,則可以進一步消除余差,因是溫度控制參數,當加入一定參數后即可取得平穩的控制曲線。因流量對象特征對象的時間參數較小,且參數有一定波動,δ大則T1短,故不必微分。
4 結束語
通過分析PID控制方法的應用,重點介紹了幾種PID參數整定策略,提出了行之有效的參數整定方法。當一個制動控制體系投入運營時,必須先整定控制器參數,才可取得理想的控制質量。而在具體生產過程中,若工藝操作條件或者負荷發生較大改變,則被控對象特點也需作出相應改變,并重新整定控制器參數。總之,PID控制是一種簡單、有效的過程控制辦法,在未來現代工業控制體系中所起的作用必將越來越重要。
[1]胡壽松.自動控制原理[M].北京:科學出版社,2002.
[2]廖常初.PID參數的意義與整定方法[J].自動化應用,2010,6(5):143-145.
[3]徐璟.PID 參數整定分析[J].廣西電業,2010,7(4):196 -199.
[4]杜云超.PID過程控制及其參數整定策略淺析[J].化學工程與裝備,2010,6(9):152 -155.
[5]王孫安,任華.工業系統的測量、驅動與控制[M].西安:西安交通大學出版社,2003.
[6]牟金善.分數階PID控制器參數整定研究[D].華東理工大學,2013.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12