非線性積分滑動面的農業車輛轉向系統控制
2015-09-10 15:59:33張琦張柯
江蘇農業科學 2015年8期
張琦 張柯

摘要: 自動轉向控制是實現農業車輛自動導航控制的關鍵技術,為了提高轉向性能和精度,提出了1種基于非線性積分滑動面的自適應滑模控制方法。先將農業車輛的轉向系統假定為1個二階的數學模型,并將系統中的不確定性因素和難以建模的外部干擾動力學系統假設為可滿足邊界條件的等效干擾;針對每個導航控制周期構建所需系統響應的瞬態過程,設計了1個非線性積分滑動面;同時根據閉環轉向控制系統提出相應的滑模控制規則,確保系統能夠獲得迅速無超調量的閉環響應曲線,并利用模糊控制實現了滑模控制增益的自適應切換。仿真試驗表明,設計的非線性積分滑動面的自適應滑模控制方法對提高農業車輛轉向控制系統的平穩性、精度具有重要意義。
關鍵詞: 自動轉向控制;非線性積分滑動面;自適應滑模控制;模糊控制;農業車輛
中圖分類號: TP273+ 2 文獻標志碼: A
文章編號:1002-1302(2015)08-0391-03
農業車輛的自動導航在實現農業自動化作業中發揮著重要作用,如自動播種、除草施肥、農藥噴灑、作物收割等領域 [1],其中農業車輛自動轉向控制系統是實現自動導航作業的核心技術 [2]。目前,農業車輛自動轉向系統主要分為馬達直接驅動轉向盤、電液轉向控制回路2種驅動方法 [3]。連世江分別研制了基于永磁無刷直流電機驅動機構的轉向控制方法,并通過自適應比例-積分-微分(proportion-integral-differential,PID)增益獲得較為滿意的控制效果 [4]。為了提高控制器的控制精度,吳曉鵬等設計了1種閉環PID控制系統,盡管能夠提高控制器的控制精度,但轉向角速度的測量則非常困難 [5]。為此,本研究提出了1種基于非線性積分滑動面的自適應滑模控制方法,能夠確保轉向控制系統獲得快速和無超調的響應特性,有效緩解了傳統滑模控制中存在的控制輸入顫振現象。
1 農業車輛轉向控制問題的描述
用于現代化、自動化及精細化農業的農業車輛,其典型的自動導航控制系統通常包括導航控制器、位置和方位傳感器、轉向角度傳感器、轉向驅動器等部分 [6]。自動導航控制系統的原理如圖1所示。
導航控制器根據車輛當前位置、方向、路徑等信息決定所需轉向角度的命令,并發送該轉向角度的命令到轉向控制器。自動轉向控制器是實現自動導航控制精度的關鍵。農業車輛自動轉向系統的原理如圖2所示。
3 仿真試驗
考慮到農田地形相對復雜,農業車輛在工作的過程中,會受到很多外力和自身因素的影響,因此難以建立合理的車輛數學模型。根據自動控制理論,可令非線性積分滑動面的數學模型(1)中的參數kg=50,τ=0 09s。且在本研究的仿真試驗中,設定等效干擾如下:
D(x)=Γe -[(t-ud)/[KF(]2[KF)]σd]2。 (18)
式中:μd=5,σd=0 5,Γ=20;瞬態過程實際t=0 3 s;非線性積分滑動面參數c1=64,c2=8,λ=24;最小、最大阻尼分別為ζmin=0 5、ζmax=0 5;階躍輸入命令δd=0 1rad。
通過仿真試驗獲得本研究所提出的基于非線性積分滑動面滑模控制的階躍響應曲線,并且在相同的參數條件下與傳統滑模控制的階躍響應曲線進行分析比較,傳統滑模控制、自適應滑模控制的階躍響應曲線如圖3、圖4所示。
由圖3可知,傳統滑模控制的上升時間約為0 3 s,穩態時間>1 0 s,且其超調量>20%。但如果使用本研究提出的新型滑模控制獲得相同的上升時間時,其穩態時間<0 5 s,且幾乎沒有超調量(圖4)。仿真結果表明,非線性積分滑動面阻尼單調增加的特性保證了轉向系統以相對較小的阻尼加速輸出響應的速度,也確保了轉向系統具有較高的阻尼,避免輸出超調量,減少穩態時間。
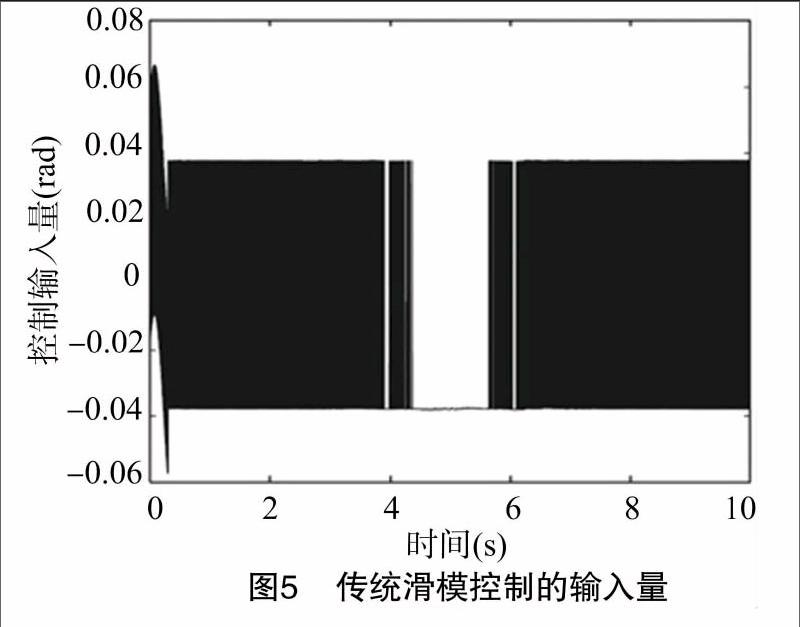
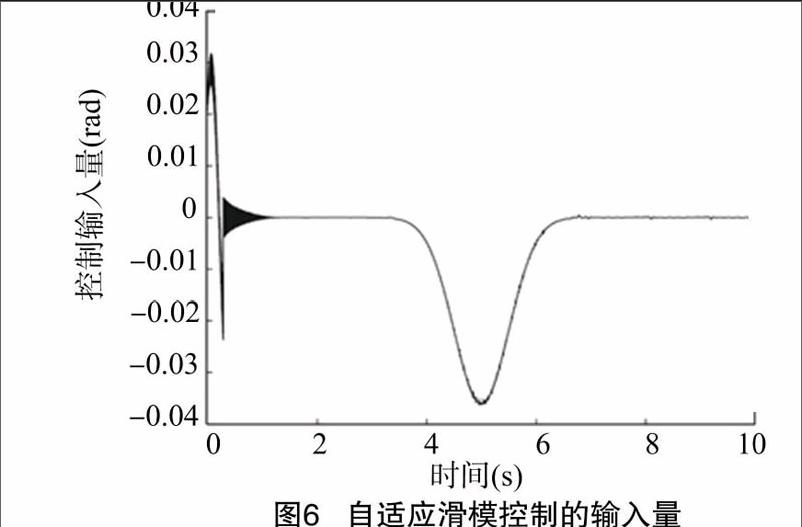
此外,雖然傳統的滑模控制方法可以通過選擇1個足夠大的固定切換增益確保控制系統的穩定性,但較大的切換增益會使系統產生較大的控制力和嚴重的顫振現象,其控制輸入量如圖5所示。本研究的模糊控制方法能夠通過自適應調節滑模控制的切換增益η,從而消除顫振現象、減小控制力,其控制輸入量在與圖5對應的時間范圍內不存在高頻振蕩(圖6)。
從圖5中可知,普通滑模控制的輸入量在0~4 s、6~10 s的時間范圍內存在高頻的大幅振動,振幅約為0 04 rad,即所謂的顫振現象,這對于控制系統來說是一個致命的缺陷。通過對比分析,在相同的條件下,2種滑模控制方法的控制輸入量表現出完全不同的平穩特性。自適應模糊滑模控制對于消除傳統滑模控制中存在的輸入顫振現象效果明顯,這對于提高農業車輛轉向控制系統的平穩性和精度具有重要的意義。
4 結論
本研究提出的用于農業車輛自動導航的自適應滑模控制方法,在系統不確定和外界干擾的情況下,可有效提高轉向系統控制的響應速度和精度。在每個導航控制周期中,為了避免轉向驅動器子系統產生大的初始沖擊力,構建了1個瞬態變化的轉向角代替恒定的轉向角,并提出了1種基于瞬態過程的非線性積分滑動面。該系統不僅具有傳統積分滑動面所具有的優點,還具有單調上升的阻尼比,使得閉環轉向系統能夠以較小的阻尼比加快輸出的響應速度,而且可利用其大阻尼比的特性來消除系統輸出的超調量。通過仿真試驗表明,自適應滑模控制方法具有變阻尼比的特性,使得轉向控制系統不僅能夠獲得迅速而無超調量的閉環響應曲線,還減緩了系統控制輸入的顫振現象,增強了系統的穩定性。
參考文獻:
[1] 張廣慶,朱思洪,李偉華,等 鉸接擺桿式重型拖拉機線控轉向系統仿真與試驗[J] 農業機械學報,2014,45(2):28-33
[2]周 慧,魯植雄,趙苗苗 基于模糊PID的線控液壓轉向系統仿真分析[J] 農機化研究,2013,35(10):194-198
[3]羅錫文,張智剛,趙祚喜,等 東方紅X-804拖拉機的DGPS自動導航控制系統[J] 農業工程學報,2009,25(11):139-145
[4]連世江 農用車輛自動導航控制系統研究[D] 楊凌:西北農林科技大學,2009
[5]吳曉鵬,趙祚喜,張智剛,等 東方紅拖拉機自動轉向控制系統設計[J] 農業機械學報,2009,40(增刊1):121-124
[6]彭秋菊,郭永豐 電動助力轉向系統扭矩信號采集系統設計[J] 自動化與儀表,2011,36(8):58-61
[7]Más F R,Zhang Q,Hansen A C Mechatronics and intelligent systems for off-road vehicles[M] Berlin:Springer,2010
[8]譚光興,李 珊,簡文國,等 線控轉向系統路感模擬控制研究[J] 計算機測量與控制,2014,22(4):1069-1072
[9]張 兵,黃文生,王 榮 基于可編程邏輯控制器的智能化灌溉控制系統研究[J] 江蘇農業科學,2013,41(6):374-376
[10] 張成濤,譚 彧,吳 剛,等 谷物聯合收割機電控全液壓轉向系統建模與仿真[J] 農業工程學報,2013,29(20):11-17endprint