基于PLC的日光溫室二氧化碳氣肥調控系統設計
2015-09-10 15:57:43單慧勇趙輝楊延榮等
江蘇農業科學 2015年8期
單慧勇 趙輝 楊延榮等


摘要: 為了進一步提高溫室大棚農作物產量,設計出了一種新型溫室CO2濃度調控系統。以海微Hw-36MT-3DA型PLC為控制中心,利用溫濕度、光強、CO2濃度等多路傳感器對溫室環境參數進行采集,采用模糊控制技術,控制電加熱氣肥發生器的工作狀態,實現對溫室CO2濃度的實時調節;上位機選用MCGS觸摸屏,實現對系統狀態的實時監控。
關鍵詞: 溫室;二氧化碳;模糊控制;PLC
中圖分類號:TP273+ 4;S625 5 文獻標志碼: A
文章編號:1002-1302(2015)08-0388-03
現有的溫室大棚主要通過控制溫度、濕度和光照來達到增產目的,二氧化碳作為植物生長光合作用的必要原料,合理適時施用CO2氣肥是提高設施農業產量和品質的重要手段 [1]。目前市場上電加熱型二氧化碳氣肥發生器多采用開環定時控制,不具備閉環控制功能,不能實時準確控制CO2施肥量,無法達到對CO2濃度的準確控制,尤其是在日出后光合作用旺盛期間經常處在虧缺狀態,影響溫室作物產量。因此,本研究擬設計一種基于PLC的智能日光溫室環境監控系統,實現對CO2氣肥補施、溫濕度、光照度等溫室環境因子的綜合調控。
1 系統硬件設計
系統下位機采用PLC為控制中心,通過溫濕度、光強、CO2濃度、土壤濕度等多路傳感器將溫室環境數據實時傳到數據采集模塊,再通過RS485總線傳給PLC,系統根據溫室環境參數綜合判斷,控制執行機構進行CO2氣肥補施。MCGS觸摸屏作為系統的上位機,通過RS232實現與PLC通信,具有實時顯示、儲存數據及對歷史數據統計等功能。系統有自動/手動2種工作狀態,自動模式下系統依據檢測環境參數和相關設定自動調控氣肥發生器,手動模式用于手動調節控制。系統組成結構如圖1所示 [2]。
1 1 PLC的選擇
目前市場上PLC的種類很多,如三菱、歐姆龍、西門子等,根據設計要求,選擇國產海微Hw-36MT-3DA型PLC,具有可靠性高、抗干擾能力強及價格低廉等特點。該PLC可以直接驅動大功率電磁閥,通信接口有RS232C、RS485、SPI_MS,36路I/O輸入輸出,程序空間為256K步,不用電池記憶,無需維護,編程語言采用梯形圖,支持高級語言(C,C+ +)混合。
[ (W11][TPSHY11 TIF]
1 2 傳感器的選擇
1 2 1 CO2傳感器 CO2傳感器選用CM1101,該傳感器模塊采用NDIR紅外測量原理,即CO2在紅外線波長區域具有吸收光譜,當對應某一氣體特征吸收波長的光波通過被測氣體時,其強度將明顯減弱,強度衰減程度與該氣體濃度有關,測量范圍0~5 000 mg/kg,供電電壓DC 5 V±5%,電壓線性輸出DC 0 8~4 V。
1 2 2 溫濕度傳感器 采用LM-300智能溫濕度采集模塊,它是一種具有廣泛前景的全數字化溫濕度采集模塊,采集溫度范圍-40 ℃~+85 ℃,精確度±0 1 ℃,相對濕度范圍0~100%, 精度為±10%。該模塊可通過隔離的RS485通信接口與RS485現場總線連接,采用MODBUS RTU協議,有操作簡單、實用性強、傳輸距離遠、精度高、受環境影響小等特點。
1 2 3 光照度傳感器 光照度傳感器為KZD系統的光照度變送器,由對弱光也有較高靈敏度的硅藍光伏探測器組成,具有測量范圍寬、線性度好、防水性能好、便于安裝、傳送距離遠等特點。適用于各種場合,尤其是溫室大棚。該傳感器暗電流小,低照度響應,靈敏度高,電流隨光照度增強呈線性變化;能輸出較大的電流和范圍較寬的工作電壓,溫度穩定性好,測量范圍較廣,范圍為0~105 lx。該傳感器的供電電源為DC 12~30 V,可采用二線制4~20 mA電流輸出或三線制0~5 V電壓輸出。
1 2 4 土壤濕度傳感器 采用FDS100土壤水分傳感器,具有測量精度高、響應速度快、土質影響較小、密封性好、價格低廉等特點。該傳感器輸出為DC 0~5 V,在飽和含水量范圍內具有良好的線性特征。
1 3 人機接口
選用北京昆侖通態自動化科技有限公司型號為TPC1062K的觸摸屏。觸摸屏與PLC聯機能實時顯示傳感器所測數據,設計與實際系統相近的組態界面,使系統在控制、功能、顯示上更為具體直觀。
2 系統的軟件設計
2 1 模糊控制設計
2 1 1 模糊控制基本結構 日光溫室環境具有時變性、非線性和時滯性的特點,很難用準確的數學模型去描述。模糊控制從本質上來說是一種非線性智能控制技術,它無須知道被控對象的精確數學模型,而是根據經驗控制行為,遵循反饋及反饋控制思想,總結成一系列控制規則,并運用軟件程序加以實現。因此采用模糊控制技術可以較好地實現溫室CO2的靈活調節。
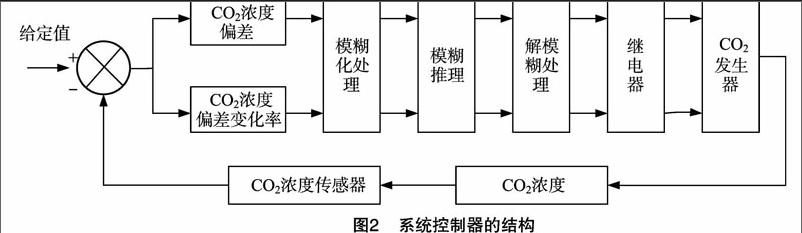
系統首先通過模糊控制器對輸入變量e和ec的精確量分別模糊量化成模糊量,再由e、ec和模糊控制規則R根據推理合成規則進行模糊決策,得到模糊控制量,最后將模糊控制量解模糊成精確量輸出。控制器結構如圖2所示 [3]。
[ (W9][TPSHY22 TIF]
2 1 2 輸入輸出變量模糊化
系統采用雙輸入單輸出的模型,將CO2濃度偏差e及其變化率ec(ec=de/dt)作為模糊控制的2個輸入變量,控制二氧化碳發生器加熱裝置的繼電器開啟時長作為輸出變量T。根據溫室CO2濃度變化的歷史數據進行分析,溫室的CO2濃度偏差變化范圍為-6%~6%,是農作物最佳的生長環境。設置CO2濃度偏差e的變化范圍為[-6,6],模糊論域取值為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],則偏差的量化因子K1=1;CO2濃度偏差變化率ec變化范圍為[-1,1],模糊論域取值為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],則偏差變化率的量化因子K2=6。CO2濃度的模糊語言變量設置為正大(PL)、正中(PM)、正小(PS)、零(Z)、負小(NS)、負中(NM)、負大(NL)。隸屬度函數選用三角形函數,輸入變量隸屬度函數如圖3所示。endprint
輸出變量T不存在負值,變化范圍為[0,60],模糊論域取值為[0,1,2,3],量化因子K3=20,控制器加熱時間的模糊語言變量為零(Z)、短時(PS)、中時(PM)、長時(PL),輸出變量隸屬度函數如圖4所示。為達到精確加熱目的,將控制繼電器開啟時長分為4段:關閉、20 min、40 min、60 min。
2 1 3 模糊控制規則 模糊控制規則實質上是將操作者在控制過程中的實踐經驗(即手動控制策略)加以總結而得到的一條條模糊條件語句的集合。選取控制量變化的原則是當偏差大或較大時,選擇控制量以盡快消除偏差為主;而當偏差較小時,選擇控制量要以防止超調和保證系統的穩定性為主。
根據模糊控制的規則,對于雙輸入、單輸出模型的模糊控制器,控制語句可寫成“if-and-then”條件語句的形式,例如:if E=NL and EC=PL then T=PS,表明當前CO2濃度負大,且CO2偏差變化率正大,則控制器輸出控制量為PS,此時繼電器開啟短時工作模式;if E=PL and EC=PL then T=Z,表明當前CO2濃度正大,且CO2偏差變化率為正大,則此時繼電器關閉,停止加熱。表1為模糊控制器的控制規則。在現實的應用當中,可根據不同情況對控制規則進行調整和完善,逐步形成最佳方案。
系統采用Mamdani模糊推理方法,根據模糊關系R=E×Ec×T 可算出所有控制規則所對應的,然后再根據偏差和偏差的論域值計算出模糊控制量,最后根據從屬度最大原則進行模糊決策,使模糊量轉換為精確量,將其乘以相應的比例因子K3,即得到繼電器開啟的時長 [4]。
2 2 人機界面的設計
人機界面由觸摸屏通過MCGS組態軟件設計實現,根據系統的設計要求,分為手動和自動兩部分,系統啟動進入自動模式完成相應設定后,組態就可以通過傳感器模塊自動采集環境參數,根據系統參數的設置,自動控制溫室環境。手動模式下,用戶可以任意控制設備,通過上位機界面直接控制,方便快捷。手動和自動二者互相協調,共同實現高效管理。設計上位機組態主界面如圖5所示。
3 結論
通過測試和實際應用設計的溫室二氧化碳測控系統具有以下特點:(1)系統以PLC為控制中心,利用多路傳感器可對CO2、溫濕度、光照度、土壤濕度等實時監測;(2)為取得理想的控制效果,采用模糊控制實現溫室二氧化碳濃度的調控;(3)采用MCGS觸摸屏,實時監控系統工作狀態,人機交互友好;(4)為了增強系統的通用性和使用靈活性,硬件、軟件均采用了模塊化結構。
參考文獻:
[1] 朱慶松,劉秀青 設施蔬菜二氧化碳施肥技術[J] 北方園藝,2013(17):55-57
[2]王智乾 基于PLC的溫室模糊灌溉控制系統研究[D] 昆明:昆明理工大學,2012
[3]李紅萍,賈秀明,趙曉莉 基于MCGS的PLC溫度監控系統設計[J] 工業儀表與自動化裝置,2012(5):83-85,88
[4]崔天時,楊廣林,劉 磊,等 基于模糊控制的溫室灌溉控制系統的研究[J] 農機化研究,2010,32(3):84-86endprint