一類混沌系統的Hopf分岔控制
2015-09-09 17:29:51曹逸凡吳鳳嬌
計算技術與自動化 2015年2期
曹逸凡+吳鳳嬌


摘??要:針對帶參數的混沌系統,運用Routh-Hurwitz判據及Hopf分岔理論研究了系統存在的動力學行為,設計了狀態反饋控制器對系統進行Hopf分岔控制。分析了系統參數及控制參數分別對系統穩定性與Hopf分岔類型的影響,得到了系統穩定及不發生Hopf分岔的系統參數條件。研究結果表明:控制器中的線性控制部分及非線性控制部分均能改變系統的分岔行為,使系統漸近穩定。數值仿真證明控制器設計的有效性。
關鍵詞:帶參數混沌系統;漸近穩定性;Hopf分岔;Hopf分岔控制
中圖分類號:O231.2????????????????文獻標識碼:A
Hopf?bifurcation?control?of?a?chaotic?system
CAO?Yi-fan,WU?Feng-Jiao
(College?of?Water?Resources?and?Architectural?Engineering;Northwest?A&F?University,Yangling,Shanxi?712100,China)
Abstract:?Using?Routh-Hurwitz?criterion?and?hopf?bifurcation?theory,the?dynamical?behaviors?of?a?chaotic?system?with?parameters?are?investigated?in?this?paper?and?also?a?feedback?controller?is?designed?to?stabilize?the?system.The?effects?of?the?system?parameters?and?controller?parameters?on?the?system?stability?and?hopf?bifurcation?type?are?discussed,and?then?the?system?parameter?conditions?that?the?system?is?stable?with?no?hopf?bifurcation?are?found?out.The?results?indicate?that?both?of?the?linear?control?part?and?nonlinear?control?part?in?the?controller?can?change?the?bifurcation?behaviors?of?the?system,which?make?the?system?asymptotically?stable.?Finally?the?numerical?simulation?proves?the?effectiveness?of?the?controller.
Key?words:Chaotic?system?with?parameters;?Asymptotic?stability;?Hopf?bifurcation;?Hopf?bifurcation?control
0??引言
混沌是非線性系統的一種特殊的運動狀態,對初始條件敏感,又具有隨機性但又不是真正的或完全的隨機運動。往往混沌運動是有害的,人們盡量回避混沌行為,并設法抑制混沌的出現。混沌控制是當前混沌運動研究的一個新領域,是實現混沌應用的關鍵環節,目前,其控制尚無統一的理論和方法。文獻[1-8]用自適應控制、滑模控制方法實現混沌系統有限時間穩定控制。Abdelkader?Senouci等(2014)[10]對一混沌系統設計了T-S(Takagi-Sugeno)模糊模型及模糊控制器,進行了仿真驗證。Jun?Yoneyama(2013)[11]提出了一種并行分布補償算法(PDC)的非線性控制設計,仿真驗證了方法可行性。賈培艷等(2013)[12]采用并行分布補償算法,結合線性矩陣不等式給出了一類離散混沌系統穩定的充分條件。Yibei?Nian等(2012)[13]提出了基于T-S模糊模型及自適應控制的一類混沌系統控制模型,Henon圖驗證了方法的實效性。Li?Yi-Min等(2012)[14]提出了控制非線性系統的一新的模糊邏輯系統,正確性得到仿真驗證。Yang?Liu等(2011)[15,16]提出了基于T-S模型的混沌系統脈沖控制方法,并進行了數字模擬驗證。如何選擇系統參數或控制參數來規避混沌或抑制混沌,上述文獻未作探討,有鑒于此,本文設計狀態反饋控制器對系統進行分岔控制,實現系統穩定。首先利用Routh-Hurwitz判據及Hopf分岔理論研究系統動力學行為;然后設計狀態反饋控制器對系統進行Hopf分岔控制,避免系統混沌的發生。
1??系統及動力學特征
考察帶參數含兩個平方項的三維混沌系統[17]
(1)
式中,a、b、c、l、h、k為實數,且bcl(h+k)>0。
1.1?平衡點及穩定性
1.1.1?O(0,0,0)點的穩定性
定理1??對于a2+4bc>0,若a>0,b<0,c>0,平衡點O(0,0,0)為穩定結點;若a<0,b>0,c<0,平衡點O(0,0,0)為不穩定結點;若a>0,b<0,c<0,平衡點O(0,0,0)為不穩定鞍點。
證明??系統(1)在O(0,0,0)點的特征方程為
(λ+c)(?λ2+aλ-ab)=0
因a2+4bc>0,則該方程有3個實根λ1=?-c,。
若a>0,b<0,c>0,有λ1<0,λ2<0,λ3<0,故平衡點O(0,0,0)為穩定結點。
若a<0,b>0,c<0,有λ1>0,λ2>0,λ3>0,故平衡點O(0,0,0)為不穩定結點。
若a>0,b<0,c<0,有λ1>0,λ2>0,λ3<0,故平衡點O(0,0,0)為不穩定鞍點。
證畢。
1.1.2?F1與F2點的穩定性
因系統(1)關于Z軸對稱,只需討論F1點的穩定性。
對于平衡點O(0,0,0)處系統(1)Jacobian矩陣的特征方程(λ+c)(?λ2+aλ-ab)=0,不論參數a,b,c如何變化,特征方程只會出現零根,始終無純虛根,因而平衡點O(0,0,0)處不會發生Hopf分岔,下面討論其他平衡點的分岔問題。
因F1與F2關于Z軸對稱,同時系統(1)又是關于Z軸對稱的,下面只考慮F1點的Hopf分岔。為方便討論,作坐標平移變換,使F1點為新坐標系的原點。
證明???因h=k≠0,系統(4)在O1(0,0,0)點的特征方程為
λ3+(a+c)λ2+(ac+bc)λ+2abc=0????????????????????????????????????????????????????????????(4)
設式(5)有一對純虛根±iβ,β>0,代入(4)式得
2abc-(a+c)β2±i(β2-ac-bc)β=0?????????????????????????????????????????????????????????????(5)
從(5)式得到
β2=ac+bc>0???????????????????????????????????????????????????????????????????????????(6)
(a+c)β2-2abc=0????????????????????????????????????????????????????????????????????????(7)
,滿足橫切條件。系統(3)在O1(0,0,0)點Hopf分岔。
證畢。
取a=2,b=6,c=1,h=1,k=1,l=1,滿足Hopf分岔條件,系統(1)在平衡點處時間歷程呈現增幅振蕩,其為亞臨界Hopf分岔。
取a=1.995,b=2,c=0.0025,h=1,k=1,l=1,同樣滿足Hopf分岔條件,系統(1)在平衡點F1(0.05,0.05,2)處時間歷程呈等幅振蕩,為超臨界Hopf分岔。
2??Hopf分岔控制與分析
對于系統參數無法遠離分岔面式(7)的情形,系統(1)將產生Hopf分岔,下面就a=2、b=6、c=1、h=1、k=1、l=1及a=1.995、b=2、c=0.0025、h=1、k=1、l=1兩種情形進行Hopf分岔控制與分析。設計包含線性與非線性兩個部分的控制器分別為
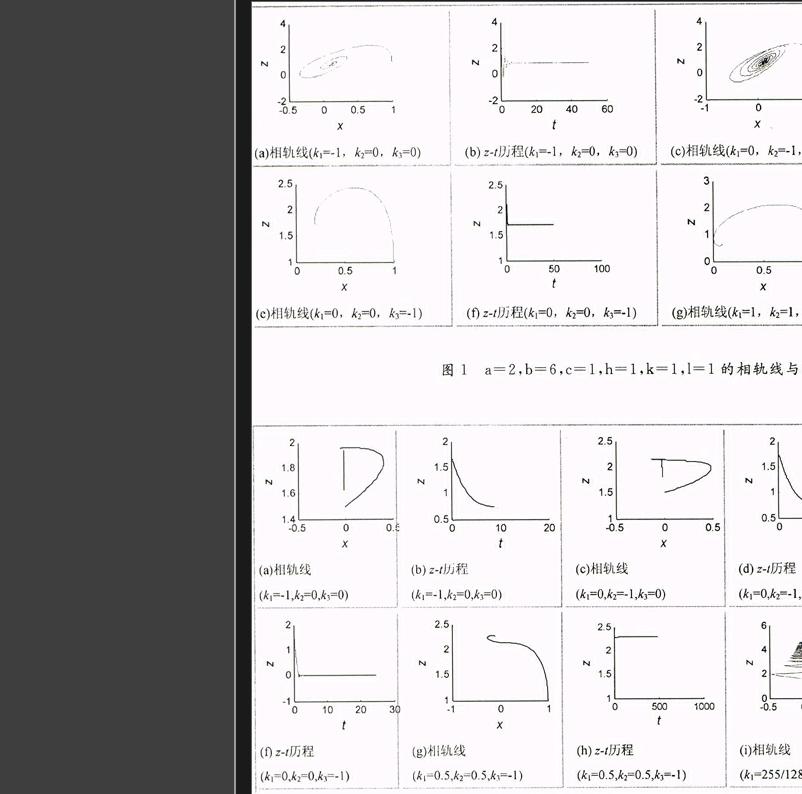
對受控系統(10)、(11)進行計算機仿真,圖1、2分別為系統參數取a=2,b=6,c=1,h=1,k=1,l=1及a=1.995,b=2,c=0.0025,h=1,k=1,l=1時系統的相軌線與時間歷程,前者為亞臨界Hopf分岔,后者為超臨界Hopf分岔。
(a)相軌線(k1=-1,k2=0,k3=0)
(b)?z-t歷程(k1=-1,k2=0,k3=0)
(c)相軌線(k1=0,k2=-1,k3=0)
(d)?z-t歷程(k1=0,k2=-1,k3=0)
(e)相軌線(k1=0,k2=0,k3=-1)
(f)?z-t歷程(k1=0,k2=0,k3=-1)
(g)相軌線(k1=1,k2=1,k3=-1)
(h)?z-t歷程(k1=1,k2=1,k3=-1)
圖1??a=2,b=6,c=1,h=1,k=1,l=1的相軌線與時間歷程
Fig.1??Track?of?x-z?and?waveform?for?t-z?of?(11)?with?a=2,b=6,c=1,h=1,k=1,l=1
當k3=0,k1與k2一個不為0,即施加單一線性控制時,如圖1(a)、1(b)和1(c)、1(d)所示,系統漸近穩定;當k3<0,即施加非線性控制時,無論有無線性控制,只要k1+?k3與k2+?k3足夠小,如圖1(e)、1(f)和1(g)、1(h)所示,系統同樣漸近穩定。表明選取線性或非線性控制增益對系統施加控制(8)后,亞臨界Hopf分岔行為消失,系統趨于穩定。
(a)相軌線(k1=-1,k2=0,k3=0)
(b)?z-t歷程(k1=-1,k2=0,k3=0)
(c)相軌線(k1=0,k2=-1,k3=0)
(d)?z-t歷程(k1=0,k2=-1,k3=0)
(e)相軌線(k1=0,k2=0,k3=-1)
(f)?z-t歷程(k1=0,k2=0,k3=-1)
(g)相軌線(k1=0.5,k2=0.5,k3=-1)
(h)?z-t歷程(k1=0.5,k2=0.5,k3=-1)
(i)相軌線(k1=255/128,k2=-8,k3=-1)
(j)?z-t歷程(k1=255/128,k2=-8,k3=-1)
圖2??a=1.995,b=2,c=0.0025,h=1,k=1,l=1的相軌線與時間歷程
Fig.2??Track?of?x-z?and?waveform?plot?for?t-z?of?(12)?with?a=1.995,b=2,c=0.0025,h=1,k=1,l=1
考察超臨界Hopf分岔情形,從圖2(a)~2(d)可以看出,對于k3=0,系統僅加線性控制,與圖1相似,超臨界Hopf分岔行為消失,系統漸近穩定,此時k1+k3=-1或k2+k3=-1,k1+k3或k2+k3較小;當k1=0,k2=0,k3=-1時,系統僅加非線性控制,如圖2(e)、2(f)所示,同樣超臨界Hopf分岔行為消失,系統漸近穩定,此時k1+k3=-1,k2+k3=-1,k1+k3均k2+k3較小;當k1=0.5,k2=0.5,k3=-1時,受控系統(11)特征值λ=[0.8348,?-2.3475,?0.0077],平衡點為不穩定鞍結點,Hopf分岔未得到控制,如圖所示2(g)、2(h),此時k1+k3=-0.5,k2+k3=-0.5,k1+k3與k2+k3都較大;保持k3=-1不變,調整k1和k2,使k1=255/128,k2=-8,此時,受控系統(11)特征值λ=[-0.0116,-0.0006+3.4714i,-0.0006-3.4714i],平衡點漸近穩定,超臨界Hopf分岔行為消失,如圖2(i)、2(j)所示,此時k2+k3=-9,k2+k3較小。表明施加單一線性、非線性控制增益或同時施加線性與非線性控制增益,只要線性與非線性控制增益的和足夠小,系統超臨界Hopf分岔行為消失,系統趨于穩定。
以上表明選取適宜線性或非線性控制增益對系統施加控制后,系統Hopf分岔行為消失,系統有限時間穩定。
3??結論
針對帶參數的非線性動力系統,研究了系統參數對系統穩定性的影響及Hopf分岔行為產生的條件;設計了控制器對系統進行Hopf分岔及穩定性控制。研究表明,系統參數及控制參數能規避與控制系統Hopf分岔行為。該方法為帶參數非線性系統Hopf分岔分析及控制提供了借鑒。
參考文獻
[1]?M?P?Aghababa.?Robust?stabilization?and?synchronization?of?a?class?of?fractional-order?chaotic?systems?via?a?novel?fractional?sliding?mode?controller[J].Communications?in?Nonlinear?Science?and?Numerical?Simulation,2012,17(6):2670–2681.
[2]?M?P?Aghababa,?H?P?Aghababa.?Finite-time?stabilization?of?uncertain?non-autonomous?chaotic?gyroscopes?with?nonlinear?inputs[J].?Applied?Mathematics?and?Mechanics,?2012,33(2):155–164?.
[3]?M?P?Aghababa,?H?P?Aghababa.?Chaos?suppression?of?rotational?machine?systems?via?finite-time?control?method[J].Nonlinear?Dynamics,2012,69(4):1881–1888.
[4]?M?P?Aghababa,?H?P?Aghababa.?A?general?nonlinear?adaptive?control?scheme?for?finite-time?synchronization?of?chaotic?systems?with?uncertain?parameters?and?nonlinear?inputs[J].Nonlinear?Dynamics,2012,69(4):1903–1914.
[5]?M?P?Aghababa,?H?P?Aghababa.?A?Novel?Finite-Time?Sliding?Mode?Controller?for?Synchronization?of?Chaotic?Systems?with?Input?Nonlinearity[J].?Arabian?Journal?for?Science?and?Engineering?,2013,38(11):3221–3232.
[6]?M?P?Aghababa.?Finite-time?chaos?control?and?synchronization?of?fractional-order?non-autonomous?chaotic?(hyper-chaotic)?systems?using?fractional?nonsingular?terminal?sliding?mode?technique[J].Nonlinear?Dynamics,2012(1-2),69:247–261.
[7]?賈尚帥,丁千.含間隙超音速二元彈翼非線性顫振與主動控制[J].中國科學(A輯),2013,43(4):390–400.
[8]?路永坤.受擾統一混沌系統的主動自適應模糊積分滑模控制[J].物理學報,2012,61(22):1-6.
[9]Takagi?T,Sugeno?M.Fuzzy?identification?of?systems?and?its?application?to?modeling?and?control[J].IEEE?Transaction?on?System?Man?Cybern,1985,15:116-132.
[10]Abdelkader?Senouci,?Abdelkrim?Boukabou.?Predictive?control?and?synchronization?of?chaotic?and?hyperchaoticsystems?based?on?a?T–S?fuzzy?model[J].?Mathematics?and?Computers?in?Simulation,2014,105:62–78.
[11]?Jun?Yoneyama.?Nonlinear?control?design?based?on?generalized?Takagi–Sugeno?fuzzy?systems[J].?Journal?of?the?Franklin?Institute,2014,351:3524–3535.
[12]?賈培艷,楊一平,柴秀麗,等.?基于T-S模糊模型的離散混沌系統的模糊控制[J].河南大學學報(自然科學版),2013,43(2):191-195.
[13]?Yibei?Nian,Yongai?Zheng.?Controlling?Discrete?Time?T-S?Fuzzy?Chaotic?Systems?via?Adaptive?Adjustment[J].?Physics?Procedia?2012,24:1915-1921.
[14]?Li?Yi?Min,Sun?Yuan?Yuan.Type-2?T-S?fuzzy?impulsive?control?of?nonlinear?systems[J].?Applied?Mathematical?Modelling,2012,36:2710-2723.
[15]?Yang?Liu,Shouwei?Zhao.T–S?fuzzy?model-based?impulsive?control?for?chaotic?systems?and?its?application[J].?Mathematics?and?Computers?in?Simulation,2011,81:2507–2516.
[16]?Cheng?Hu,HaijunJiang,?ZhidongTeng.General?impulsive?control?of?chaotic?systems?based?on?a?TS?fuzzy?model[J].?Fuzzy?Sets?and?Systems,2011,174,66–82.
[17]?李福琴,涂金忠.?一類三維混沌系統的Hopf分岔[J].科學技術與工程,2010,10(5):1198-1120.
[18]?張中華,袁惠群,張宇白.一類電機系統的分岔分析與Hopf分岔控制[J].?兵工學報,2013,34(8):1051-1056.