緊湊型掃路機轉向橋設計及仿真分析*
2015-08-25 03:17:38福建龍馬環衛裝備股份有限公司李小冰
海峽科學 2015年2期
福建龍馬環衛裝備股份有限公司 李小冰
緊湊型掃路機轉向橋設計及仿真分析*
福建龍馬環衛裝備股份有限公司 李小冰
該文介紹了一種緊湊型液壓驅動掃路機轉向橋的設計,應用AMESim軟件對該轉向橋進行建模仿真,得出了轉向系統各參數特性曲線,并對仿真結果進行分析,對進一步提高自行走機械全液壓轉向橋的性能提供參考。
液壓驅動 掃路機 轉向橋
隨著我國城市建設的不斷發展,對城市道路清掃工作也提出了更高的要求。雖然目前國內大部分城市基本實現了城市主干道清掃的機械化,但是占城市清掃面積將近一半的街巷、慢行道、便道仍然靠人力使用大掃帚完成清掃保潔工作[1]。為了改變這一狀況,發展、使用緊湊型全液壓驅動掃路機勢在必行。緊湊型全液壓驅動掃路機最高行駛速度約為35km/h,采用全液壓轉向橋設計能滿足其結構緊湊、轉向靈活的要求。應用AMESim軟件對全液壓轉向系統進行仿真,分析其轉向特性,對于提高掃路機在工作過程中的可靠性及高效性具有重要意義。
1 轉向系統設計
緊湊型全液壓掃路機轉向系統主要由轉向機構裝置及轉向液壓裝置兩大部分組成,轉向機構裝置由轉向節臂、橫拉桿、轉向油缸桿、轉向油缸筒、前橋等構成,如圖1所示。轉向液壓系統主要由液壓泵、液壓轉向器、液壓油箱、轉向油缸等組成,其中轉向油缸既是轉向機構裝置的一部分,又是轉向液壓系統的一部分。
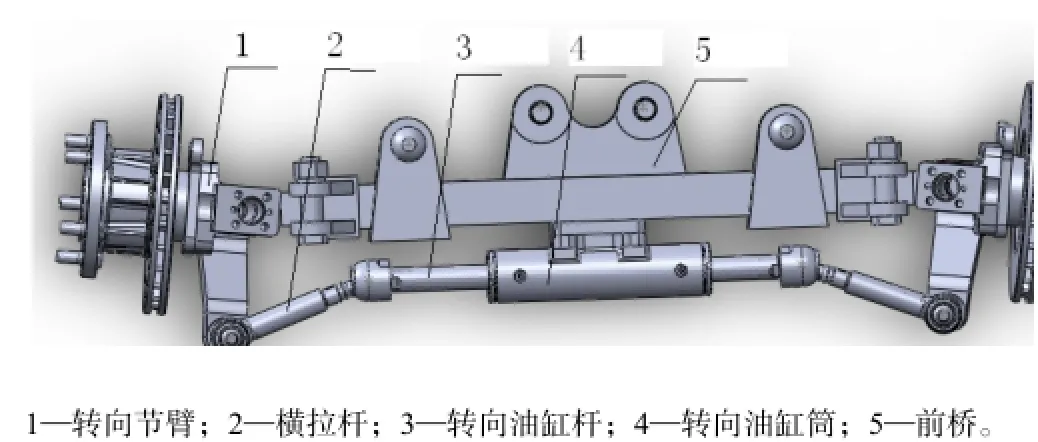
圖1 轉向橋總成
圖2 是轉向機構幾何模型,該轉向機構轉向力矩(單位:Nm)為[2]:
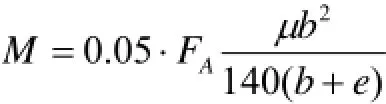
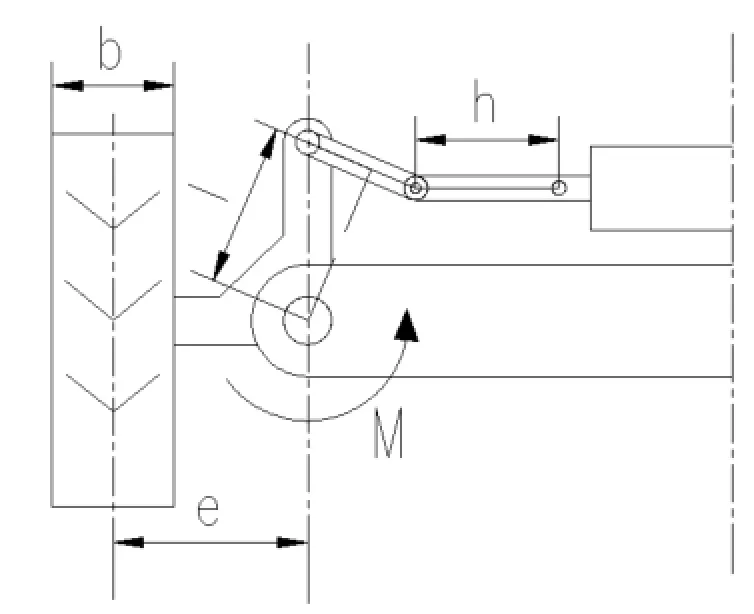
圖2 轉向機構幾何模型
在眾多仿真軟件中,AMESim作為一款成熟且優秀的仿真軟件,已成為流體、機械、熱分析等復雜系統建模和仿真的優先選擇平臺。為了盡可能真實地反映系統特性,在應用AMESim仿真軟件建立轉向系統各部分元件的仿真模型前,先建立轉向系統各元件的數學模型。從轉向系統各部件的工作原理和系統工作原理出發,對轉向系統的關鍵部件建立較為準確的子模型,并假設系統各元件的壓力、流量、泄漏等參數在理想條件下[3]。圖3為轉向橋仿真模型,圖4為轉向器子模型。仿真參數設置見表1。
2 轉向系統仿真及分析
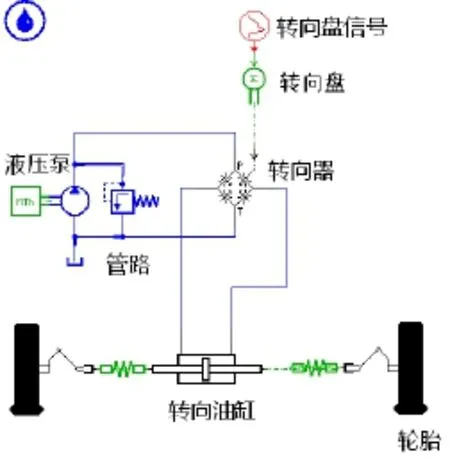
圖3 轉向橋仿真模型

圖4 轉向器子模型
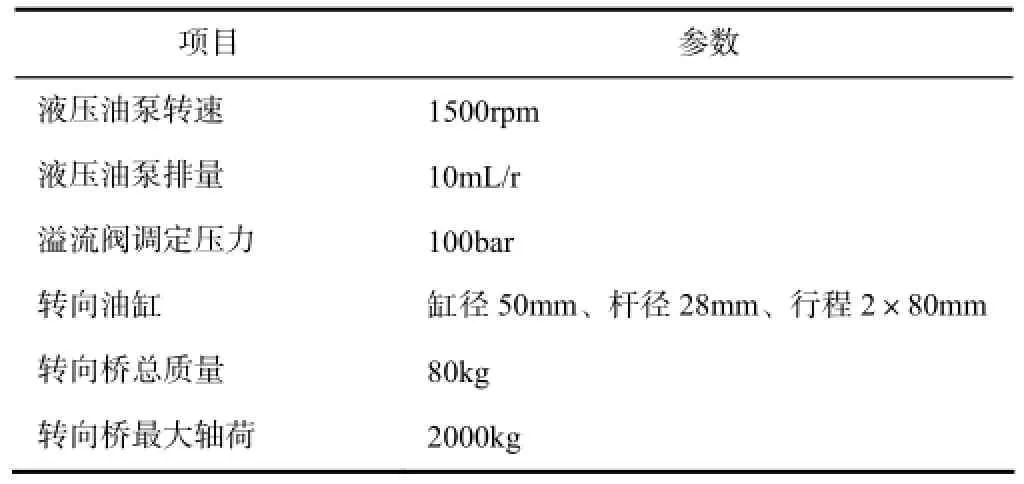
表1 仿真參數設置
仿真開始2s后,方向盤輸入30°的轉角,轉向液壓系統壓力、液壓泵扭矩等開始上升,在時間大約達到2.8s時,液壓泵扭矩達到約14Nm,如圖5所示。液壓系統壓力達到80bar左右,如圖6所示。轉向阻力均值約為4kN,如圖7所示,與計算結果接近。轉向阻力在3kN~4.5kN之間振蕩,液壓系統壓力在60bar~95bar之間振蕩,對該壓力曲線數據進行快速傅里葉變換(FFT),得出其振蕩頻率約為23Hz,其振蕩頻率與發動機固有頻率接近。由此可知,液壓系統振蕩主要是由發動機固有振蕩頻率引起的。
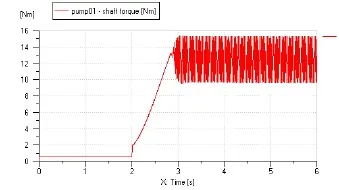
圖5 液壓泵扭矩特性曲線
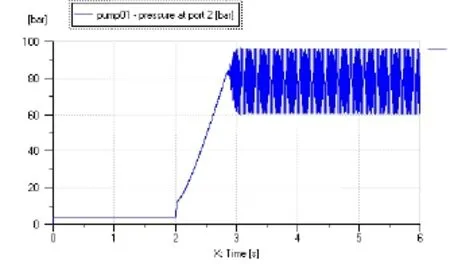
圖6 液壓泵壓力曲線
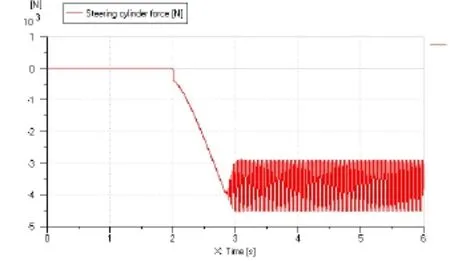
圖7 轉向阻力曲線
3 結論
本文介紹了緊湊型全液壓驅動掃路機轉向橋的設計,給出了轉向力矩計算式。通過AMESim軟件對轉向系統進行建模仿真,得出了轉向系統各參數特性曲線,并對仿真結果進行了相應的分析。通過試驗,驗證了轉向系統仿真模型的準確性,對進一步提高自行走機械全液壓轉向橋的性能提供參考。
[1] 羅立炎,于今,李源.我國道路清掃車的發展趨勢[A]//2010年重慶市機械工程學會學術年會論文集[C],2010.
[2] 博世力士樂中國.博世力士樂行走液壓樣本RC 14 365/01.98.
[3] 李永堂, 雷步芳, 高雨茁.液壓系統建模與仿真[M].北京:冶金工業出版社,2003.
* 注:福建省區域重大項目(項目編號:2012H4016)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19