基于信號(hào)體制的熱噪聲模型及對(duì)RAIM 的影響
2015-08-10 09:42:24崔曉偉陸明泉
浙江大學(xué)學(xué)報(bào)(工學(xué)版) 2015年4期
賀 劉,姚 錚,崔曉偉,陸明泉,郭 婧
(1.清華大學(xué) 電子工程系,北京100084;2.中國(guó)民航科學(xué)技術(shù)研究院,北京100084)
隨著GPS與GLONASS的現(xiàn)代化,Galileo與我國(guó)北斗系統(tǒng)的建設(shè),全球GNSS系統(tǒng)進(jìn)入了蓬勃發(fā)展時(shí)期,多模、多頻聯(lián)合導(dǎo)航已成為導(dǎo)航系統(tǒng)發(fā)展的主要趨勢(shì)[1].由于測(cè)距源數(shù)量的倍增,客觀上增大了測(cè)距出現(xiàn)故障偏差的概率,熱噪聲、多徑、干擾等復(fù)雜環(huán)境將削弱測(cè)距的可靠性,觀測(cè)測(cè)距的完好性日趨重要.接收機(jī)完好性監(jiān)測(cè)(receiver autonomous integrity monitoring,RAIM)技術(shù)作為用戶端唯一的完好性監(jiān)測(cè)手段,通過(guò)故障檢測(cè)與排除(fault detect execution,F(xiàn)DE)算法,利用冗余觀測(cè)信息進(jìn)行一致性統(tǒng)計(jì)校驗(yàn),剔除含粗差的故障測(cè)距,以提升測(cè)距置信度水平,進(jìn)而保證定位估計(jì)的準(zhǔn)確性.
由于受測(cè)距噪聲與接收設(shè)備熱噪聲的影響,測(cè)距觀測(cè)精度不完全相同,方差隨著俯仰角度及C/N0等多種因素相應(yīng)變化.在傳統(tǒng)加權(quán)RAIM 算法與模型 中, NIO-RAIM (novel integrity-optimized RAIM)算法[2]針對(duì)衛(wèi)星特征斜率提出最優(yōu)加權(quán),可以有效地提升系統(tǒng)可用性,但會(huì)犧牲一定的定位精度,且復(fù)雜度較高,不易在側(cè)重定位域的實(shí)時(shí)接收機(jī)中使 用;廣 域 增 強(qiáng) 系 統(tǒng)(wide area augmentation system,WAAS)加權(quán)模型[3]的適用范圍較窄,僅限于GPS,不適用于多模多頻場(chǎng)景;雙頻加權(quán)模型[4]基于服務(wù)體積模型(service volume model,SVM),涵蓋了殘余電離層延遲、對(duì)流層延遲及多徑等主要誤差源,適用于GPS/Galileo雙模雙頻場(chǎng)景,但頻點(diǎn)間加權(quán)因子等權(quán),帶來(lái)了一定的熱噪聲模型偏差.
傳統(tǒng)加權(quán)模型均未考慮信號(hào)體制對(duì)接收機(jī)熱噪聲的影響.在接收機(jī)偽碼跟蹤環(huán)路中,復(fù)合二進(jìn)制偏移載波(composite binary offset carrier,CBOC)、交替二進(jìn)制偏移載波(alternate binary offset carrier,AltBOC)等新型調(diào)制方式與二進(jìn)制相移鍵控(binary phase shift keying,BPSK)類(lèi)傳統(tǒng)調(diào)制方式的碼跟蹤精度不同.尤其在雙頻組合場(chǎng)景中,采用雙頻定位解算方法雖然能夠有效地抑制電離層延遲,但對(duì)各信號(hào)熱噪聲及多徑延遲有一定的放大作用,這將加大信號(hào)體制間觀測(cè)量的精度差距,造成測(cè)距觀測(cè)精度不等權(quán)現(xiàn)象.
傳統(tǒng)加權(quán)模型忽略了信號(hào)體制原因帶來(lái)的測(cè)距精度不等權(quán)問(wèn)題,該模型假設(shè)與實(shí)際不符的情況將對(duì)加權(quán)RAIM 技術(shù)性能的評(píng)估帶來(lái)偏差.本文在噪聲干擾層面,通過(guò)仿真分析了幾種典型信號(hào)在偽碼跟蹤延遲鎖相環(huán)路(delay-locked loop,DLL)跟蹤精度的差異性,根據(jù)信號(hào)調(diào)制方式、接收機(jī)設(shè)計(jì)參數(shù)和C/N0,建立新型接收機(jī)偽距誤差熱噪聲模型,推導(dǎo)了各頻點(diǎn)測(cè)距加權(quán)因子的產(chǎn)生方式,進(jìn)而細(xì)化完善了新型雙頻加權(quán)模型.仿真測(cè)試表明,該模型能夠更加合理地反映雙頻測(cè)距的實(shí)際噪聲,優(yōu)化了雙頻加權(quán)RAIM 算法的FDE 性能,提升了測(cè)距置信度水平并有效保證了定位精度,適用于不同信號(hào)體制共用的雙頻定位域場(chǎng)景.
1 信號(hào)體制對(duì)碼偽距測(cè)量精度的影響
1.1 多信號(hào)體制共用的現(xiàn)實(shí)趨勢(shì)
隨著信號(hào)結(jié)構(gòu)的設(shè)計(jì)與發(fā)展,出現(xiàn)了新一代信號(hào)體制,如在二進(jìn)制偏移載波(binary offset carrier,BOC)信號(hào)基礎(chǔ)上發(fā)展出的CBOC、AltBOC 等新型導(dǎo)航信號(hào)調(diào)制方式.新信號(hào)易于實(shí)現(xiàn)頻段資源復(fù)用、利于信號(hào)捕獲,具有降低偽碼跟蹤誤差、抑制信號(hào)多徑等顯著優(yōu)勢(shì),已廣泛應(yīng)用于GNSS 各頻點(diǎn)中.傳統(tǒng)BPSK-R 信號(hào)將在導(dǎo)航系統(tǒng)中繼續(xù)使用,多種導(dǎo)航信號(hào)體制的共用與互操作已成為GNSS系統(tǒng)的現(xiàn)實(shí)應(yīng)用趨勢(shì).表1給出目前GNSS系統(tǒng)采用的主要信號(hào)調(diào)制方式.表中,BPSK-R(n)指具有(n ×1.023) MHz碼片速率的BPSK-R 信 號(hào);BOC(a,b)指一個(gè)(a ×1.023) MHz的方波頻率與一個(gè)(b ×1.023) MHz碼片速率產(chǎn)生的BOC 調(diào)制信號(hào);CBOC(6,1,1/11)信號(hào)是BOC(6,1)與BOC(1,1)通過(guò)時(shí)分復(fù)用方式,在導(dǎo)頻通道中按照1/10功率比組合而成;類(lèi)似地,BOC(6,1)與BOC(1,1)在時(shí)間復(fù)用二進(jìn)制偏置載波(time-multiplexed BOC,TMBOC)(6,1,4/33)信號(hào)導(dǎo)頻通道中的功率分配比是4/33.
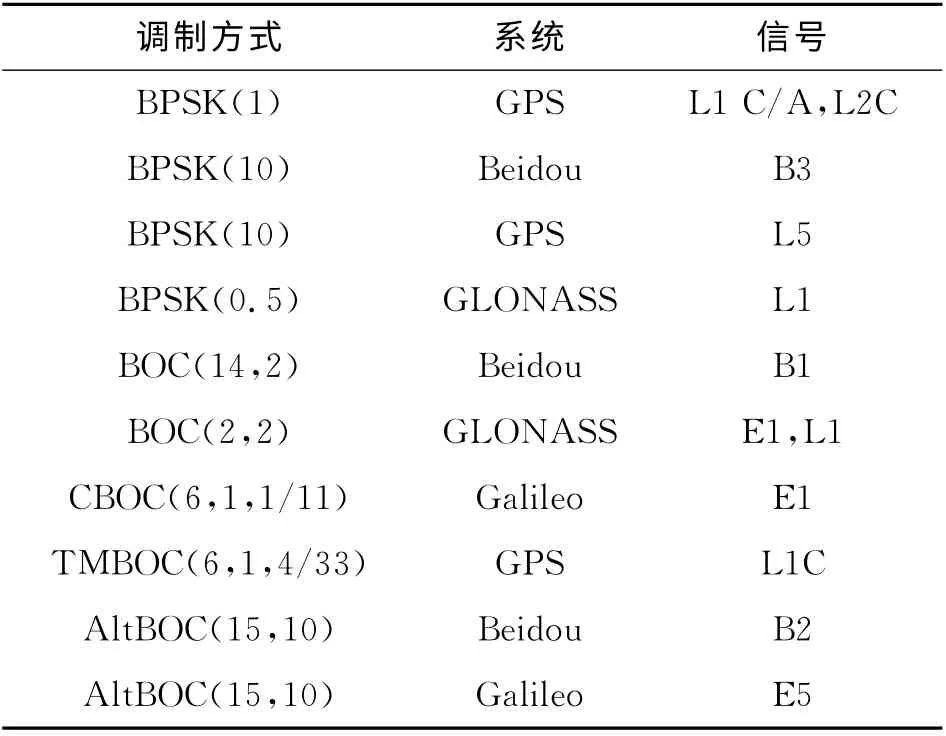
表1 GNSS廣泛采用的信號(hào)體制Tab.1 Widely adopted signal structures of GNSS
1.2 信號(hào)體制間碼跟蹤精度的差異性
為了分析不同信號(hào)體制在接收機(jī)碼環(huán)中的跟蹤精度,選取廣泛使用的BOC(14,2)、CBOC(6,1,1/11)、AltBOC(15,10)與BPSK-(1)、BPSK-(10)進(jìn)行分析.分析的跟蹤方法使用非相干超前和滯后(noncoherent early-late processing,NELP)算法.
根據(jù)碼跟蹤誤差理論估計(jì)理論[5-9]可知,信號(hào)通過(guò)DLL環(huán)路鑒別器后,輸出熱噪聲鑒別誤差方差為
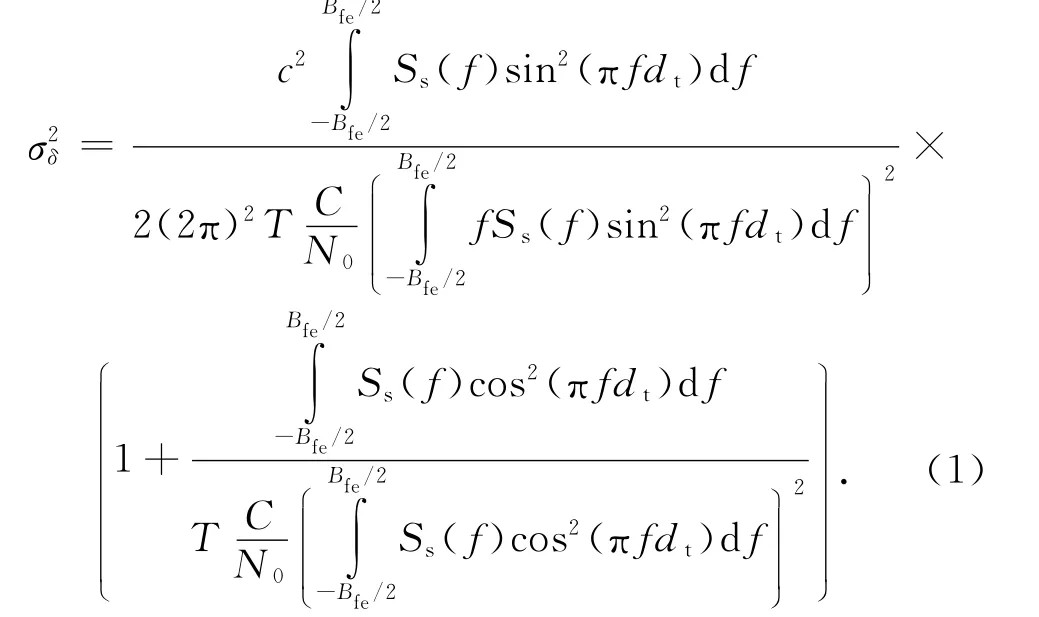
式中:c為光速,Bfe為接收機(jī)前端帶寬,Ss(f)為信號(hào)調(diào)制方式的歸一化功率譜密度,T 為預(yù)檢測(cè)積分時(shí)間,dt為相關(guān)器超前、滯后間隔.信號(hào)通過(guò)環(huán)路濾波器后,DLL環(huán)路碼跟蹤誤差σDLL為

式中:BDLL為濾波器帶寬,σDLL為信號(hào)在單位測(cè)距標(biāo)準(zhǔn)差σ下的偽距測(cè)量精度.
σDLL與接收機(jī)設(shè)計(jì)參數(shù)相關(guān),假設(shè)濾波器帶寬BDLL為5Hz,預(yù)檢測(cè)積分時(shí)間T 為20ms,AltBOC(15,10)前端帶寬為51 MHz,其余信號(hào)前端帶寬為18MHz.通過(guò)仿真得到各信號(hào)的碼環(huán)跟蹤誤差理論下限值,如圖1所示.可以看出,不同信號(hào)調(diào)制方式下的σDLL差別明顯,尤其在C/N0較低的弱信號(hào)條件下,40dB-Hz時(shí)BPSK-(1)的碼跟蹤誤差與其他調(diào)制信號(hào)相比已超出0.5m.
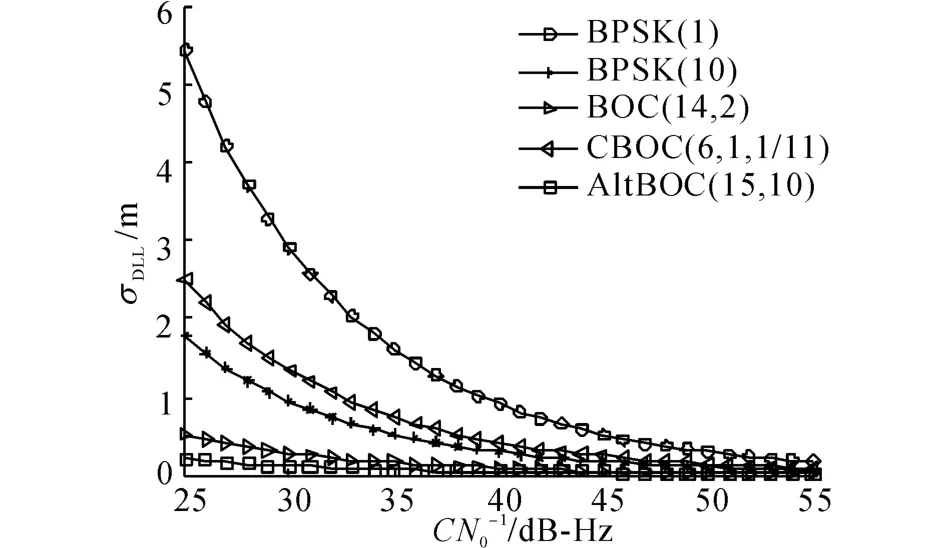
圖1 各信號(hào)的碼跟蹤誤差Fig.1 Code tracking error of signal structures
2 新型雙頻加權(quán)模型
通過(guò)處理捕獲信號(hào)的直接擴(kuò)頻序列,實(shí)現(xiàn)接收機(jī)碼片同步,進(jìn)而可以獲得偽距觀測(cè)值.碼偽距作為基本觀測(cè)量,置信度是影響PVT 定位精度的主要因素.理想測(cè)距為衛(wèi)星與用戶間的真實(shí)幾何距離,而實(shí)際測(cè)距含有噪聲誤差.一般地,測(cè)距噪聲服從期望為零、方差為σ2的高斯分布.噪聲方差越小,最終的定位結(jié)果越接近用戶的真實(shí)位置.測(cè)距噪聲方差是多種誤差方差的期望之和,可以表示為

式中:σURA為星歷誤差,σiono為電離層延遲,σtropo為對(duì)流層 延 遲,σmpth為 多 徑 誤 差,σrevr為 接 收 機(jī) 熱 噪聲誤差.
2.1 傳統(tǒng)等權(quán)值雙頻模型
為了獲得更精確的定位解,可以通過(guò)2種方法抑制或部分消除噪聲的影響:一是通過(guò)算法或模型消除部分噪聲誤差;二是通過(guò)加權(quán)算法,以提高或降低測(cè)距權(quán)值的方式歸一化噪聲方差.在雙頻組合中,依靠頻點(diǎn)測(cè)距作差能夠消除大部分的電離層延遲,但熱噪聲屬于系統(tǒng)誤差,很難消除.在GPS/Galileo雙模雙頻場(chǎng)景中,傳統(tǒng)加權(quán)模型和各類(lèi)誤差方差模型[10-12]可以表示為

式中:測(cè) 距 間 用 戶 距 離 精 度(user range error,URA)可取1、0.5、0.2m;σ2L1L2為0.04,表示雙頻誤差參數(shù).對(duì)流層延遲模型σi,tropo為
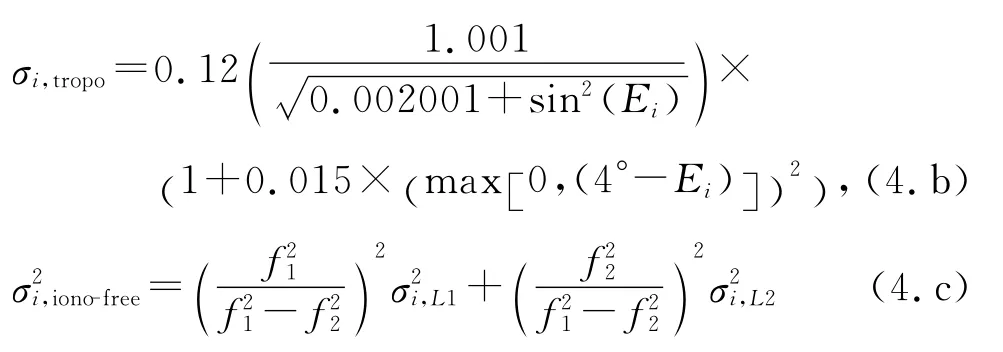
表示各頻點(diǎn)無(wú)電離層延遲模型,其中各頻點(diǎn)測(cè)距加權(quán)因子相等:

熱噪聲模型RMSpr-air與多徑延遲模型與仰角Ei相關(guān):

2.2 新型接收機(jī)偽距誤差熱噪聲模型
在雙頻組合的實(shí)際應(yīng)用中,一般可以假設(shè)URA誤差相等,由于頻點(diǎn)間信號(hào)經(jīng)過(guò)近似相同的對(duì)流層路徑,σtropo相等,σrevr及σmpth相互獨(dú)立.
根據(jù)1節(jié)的分析可知,不同信號(hào)體制下碼跟蹤誤差存在明顯差異,各頻點(diǎn)測(cè)距熱噪聲不等.由式(4.d)、(4.e)、(4.f)可知,傳統(tǒng)模型中熱噪聲方差RMSpr_air與仰角相關(guān),且假設(shè)各頻點(diǎn)測(cè)距σi,L1與σi,L2相等,這與接收機(jī)DLL環(huán)路熱噪聲的實(shí)際情況存在一定的偏差.傳統(tǒng)模型的頻率方差σ2L1L2為固定值,不能靈活地兼容各系統(tǒng)各頻點(diǎn)中心頻率不同的情況.
由于傳統(tǒng)模型不能兼顧不同調(diào)制方式組合使用的情況,尤其在如今新型信號(hào)和傳統(tǒng)信號(hào)共用與互操作廣泛應(yīng)用時(shí)期.為了改進(jìn)、修正傳統(tǒng)模型中接收機(jī)熱噪聲模型的偏差問(wèn)題,根據(jù)信號(hào)體制的差異性,由式(1)、(2)可得基于信號(hào)體制的新型熱噪聲方差模型:

新型熱噪聲模型與信號(hào)體制功率譜密度、接收機(jī)碼環(huán)設(shè)計(jì)參數(shù)及C/N0相關(guān),將該模型替換傳統(tǒng)模型中的RMS2pr_air與σ2L1L2項(xiàng),各頻點(diǎn)測(cè)距的加權(quán)因子σ′i為

2.3 新型雙頻加權(quán)模型描述
雙頻組合能夠消除大部分電離層誤差,無(wú)電離層偽距ρi 的數(shù)學(xué)模型[13]為

式中:f1、f2為各頻點(diǎn)的中心頻率,ρL1、ρL2為各頻點(diǎn)的偽距.對(duì)式(8)求期望后,可得雙頻加權(quán)方差為

由式(9)可見(jiàn),雙頻組合將增大接收機(jī)熱噪聲和多徑誤差.當(dāng)σ′i,L1與σ′i,L2一定時(shí),2個(gè)頻率的間隔越大,對(duì)誤差的放大作用越小;當(dāng)2個(gè)頻點(diǎn)的偽距跟蹤精度不同時(shí),高頻頻點(diǎn)測(cè)距誤差所占的比重更大.
綜上所述,基于信號(hào)體制優(yōu)化的雙頻加權(quán)模型為

σURA使用傳統(tǒng)估計(jì)值.
3 新模型對(duì)RAIM 技術(shù)的影響
新型雙頻模型作為一項(xiàng)基礎(chǔ)模型,可以廣泛應(yīng)用于加權(quán)定位估計(jì)與加權(quán)RAIM 技術(shù).
根據(jù)加權(quán)最小二乘定位解算模型可知,加權(quán)最小二乘估計(jì)解[11]為

式中:R 為歸一化噪聲方差加權(quán)矩陣,
加權(quán)矩陣實(shí)現(xiàn)了測(cè)距誤差的歸一化處理.由式(11)可得歸一化的偽距殘差矢量w 與映射矩陣U:

w 各分量相互獨(dú)立,可得w=URy=URn,其中n 為噪聲矢量,服從期望為0、方差為1的高斯分布.由于w 的幅值體現(xiàn)了觀測(cè)值間的一致性,可將歸一化的偽距殘差平方和作為檢驗(yàn)統(tǒng)計(jì)量[14],雙模條件下服從自由度為(n-5)的χ2分布.根據(jù)用戶給定的虛警率Pfa能夠確定歸一化的檢驗(yàn)門(mén)限值T,進(jìn)而判決測(cè)距是否存在粗差.
4 仿真驗(yàn)證與分析
通過(guò)仿真得到GPS24 星星座及Galileo27/3/1Walker星座,仰角遮蔽角為5°,時(shí)長(zhǎng)1d,采樣步長(zhǎng)為1min,獲得1 440個(gè)采樣點(diǎn).以5°×5°為采樣區(qū)間,遍歷得到全球范圍可見(jiàn)衛(wèi)星數(shù)的分布情況,如圖2所示.圖中,SatN為可見(jiàn)衛(wèi)星數(shù),Pr為分布概率.
按照航空無(wú)線電委員會(huì)(Radio Technical Commission for Aeronautics,RTCA)規(guī)定的“最小操作性能標(biāo)準(zhǔn)”[15]要求,遍歷全球24個(gè)地點(diǎn).測(cè)距標(biāo)準(zhǔn)差σ統(tǒng)一取2.5m,URA 取1m,Pfa取0.01.假設(shè)各系統(tǒng)雙頻組合為:GPS L1 C/A 碼BPSK-R(1),中心頻點(diǎn)頻率為1 575.42 MHz,L5BPSK-R(10),中心頻點(diǎn)頻率為1 176.45 MHz;Galileo E1 CBOC(6,1,1/11),中心頻點(diǎn)為1 575.42 MHz,E5a AltBOC(15,10),中心頻點(diǎn)為1 191.795 MHz.
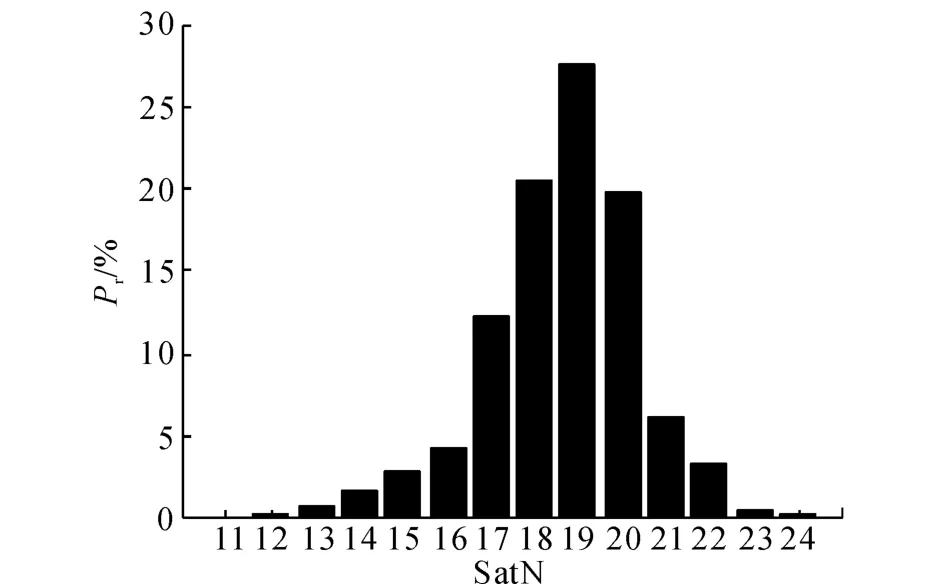
圖2 可見(jiàn)衛(wèi)星數(shù)分布Fig.2 Distribution of number of visible satellites
為了仿真對(duì)比各模型對(duì)全球RAIM 技術(shù)FDE平均性能的影響.設(shè)置3種處理方法,方法a為單頻處理方法,方法b為雙頻等權(quán)處理方法,方法c為本文提出方法.由于雙模或多模場(chǎng)景的漏檢率極低[16],考慮故障檢測(cè)率和虛警率指標(biāo).為了便于直觀顯示,在虛警量級(jí)接近的條件下,對(duì)新模型與傳統(tǒng)模型進(jìn)行比較.表2給出各場(chǎng)景3~10σ的全球24地點(diǎn)的平均FDE 性能.單頻方法的故障檢測(cè)率較低,虛警率極低.雙頻方法的故障檢測(cè)率大幅高于單頻方法,本文方法優(yōu)化了加權(quán)RAIM 技術(shù)的FDE性能,c方法的故障檢測(cè)率優(yōu)于b方法,尤其在故障較小時(shí)更加顯著.
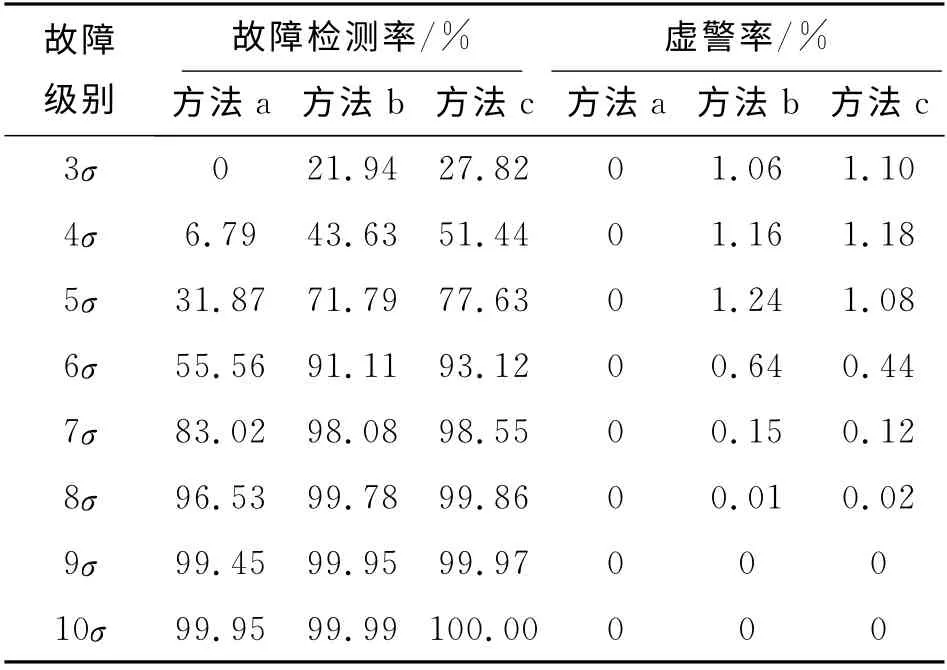
表2 平均FDE性能Tab.2 Average FDE performance
在上述仿真環(huán)境下,經(jīng)過(guò)FDE 步驟,分析各方法的定位精度.選擇北京觀測(cè)站,隨機(jī)選取一個(gè)健康衛(wèi)星,在觀測(cè)測(cè)距的各個(gè)采樣歷元中均加入±5 m至±25m 的隨機(jī)突變偏差,得到圖3所示的各場(chǎng)景定位 精 度,三 維 均 方 根 誤 差(root mean square,RMS)列于圖3的右下角.圖中,Lat為緯度,Lng為經(jīng)度.由于故障檢測(cè)率較低,含故障偏差測(cè)距影響了觀測(cè)測(cè)距置信度,方法1的RMS較高,為4.41m;方法2的RMS為3.37m;經(jīng)過(guò)本文提出模型的進(jìn)一步優(yōu)化,方法3的RMS降至2.96m,與雙頻等權(quán)方法相比,定位精度提升約0.4 m.需要指出,方法2、3是經(jīng)過(guò)RAIM 故障檢測(cè)與排除,獲得較高測(cè)距置信度,并對(duì)測(cè)距噪聲歸一化加權(quán)定位解算共同優(yōu)化的結(jié)果.
為了不失一般性,表3給出各方法在全球24地點(diǎn)的平均RMS結(jié)果.各方法的定位精度與北京觀測(cè)站定位精度相近,可以看出,采用本文模型可以有效地保證定位精度.
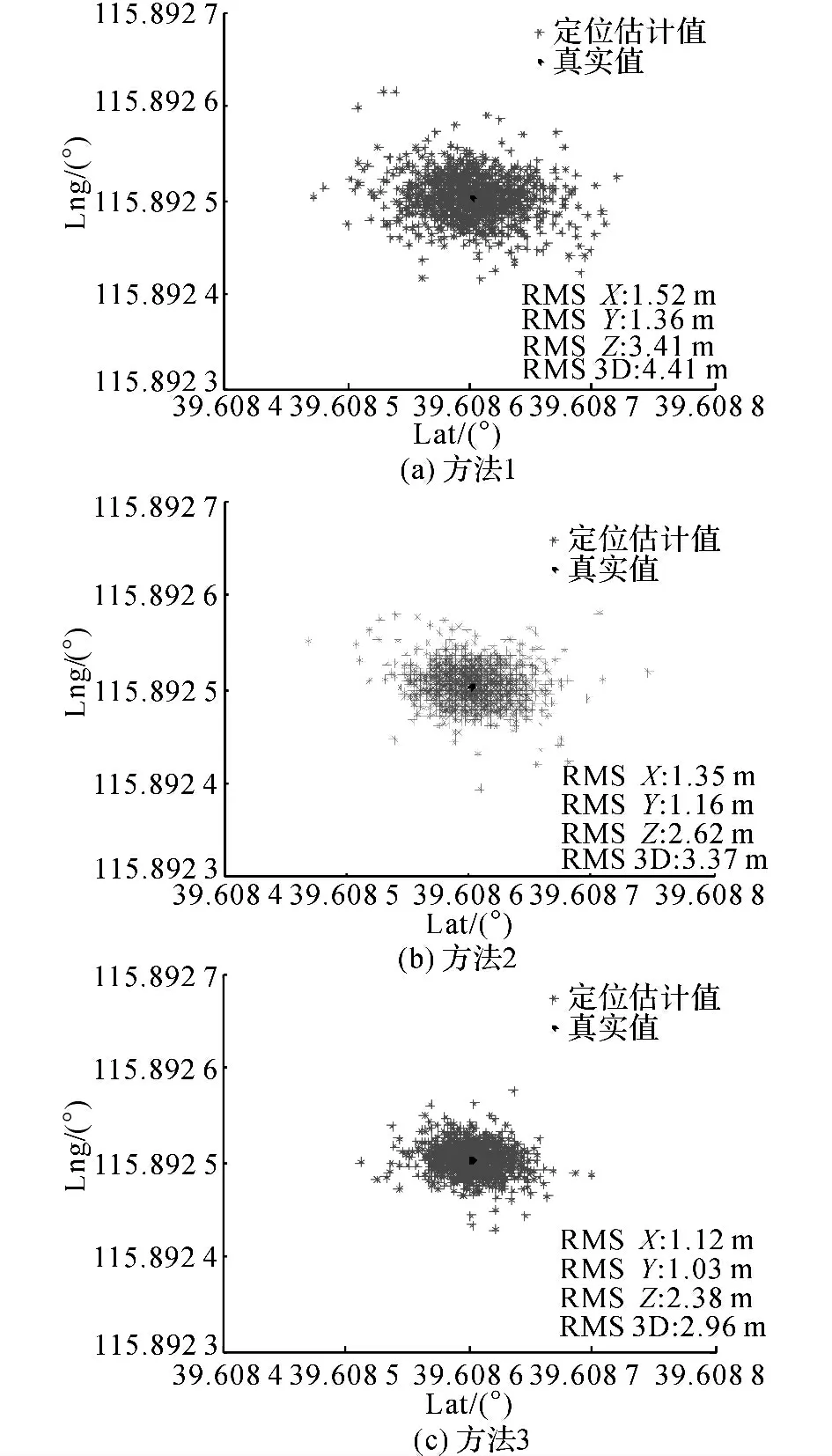
圖3 方法1~3的定位精度Fig.3 Positioning accuracy of method 1~3
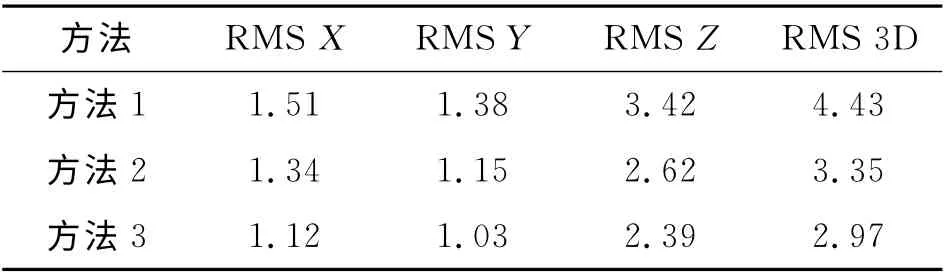
表3 全球24地點(diǎn)平均RMSTab.3 Average RMS of 24worldwide locations m
5 結(jié) 語(yǔ)
本文在分析幾種典型信號(hào)調(diào)制方式在接收機(jī)DLL環(huán)路碼跟蹤精度的基礎(chǔ)上,提出基于信號(hào)體制的接收機(jī)熱噪聲加權(quán)模型.結(jié)合傳統(tǒng)雙頻組合各噪聲方差估計(jì),分析新模型對(duì)雙頻加權(quán)RAIM 技術(shù)性能及定位估計(jì)精度的影響.仿真測(cè)試表明,采用本文模型能夠優(yōu)化提高RAIM 技術(shù)FDE 性能,提升各頻點(diǎn)測(cè)距置信度水平,并有效地保證定位精度,適合于信號(hào)體制共用條件下的定位域應(yīng)用場(chǎng)景.作為基礎(chǔ)加權(quán)模型,該模型能夠適應(yīng)信號(hào)體制多樣化的展趨勢(shì),具有廣泛適用性的特點(diǎn).
(
):
[1]郭婧.多模多頻衛(wèi)星導(dǎo)航系統(tǒng)RAIM 技術(shù)研究[D].北京:清華大學(xué),2011:1-12.GUO Jing.Research on RAIM for multi-constellation and multi-frequency satellite navigation systems [D].Beijing:Tsinghua University,2011:1-12.
[2]MADONNA P,VIOLA S,SFARZO L.NIORAIM algorithm applied to a multiconstellation GNSS:analysis of integrity monitoring performances in various phases of flight[C]∥Position Location and Navigation Symposium(PLANS).Palm Springs:IEEE,2010:1258-1263.
[3]WALTER T,ENGE P.Weighted RAIM for precision approach[C]∥ION GPS 1995.Palm Springs:[s.n.],1995:1995-2004.
[4]HARTINGER H,BRUNNER F K.Variances of GPS phase observations:the SIGMA-εmodel[J].GPS Solutions,1999,2(4):35-43.
[5]BETZ J W,KOLODZIEJSKI K R.Generalized theory of code tracking with an early-late discriminator Part I:lower bound and coherent processing[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1538-1550.
[6]BETZ J W,KOLODZIEJSKI K R.Generalized theory of code tracking with an early-late discriminator part II:noncoherent processing and numerical results[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1557-1564.
[7]何在民.衛(wèi)星導(dǎo)航信號(hào)碼跟蹤精度研究[D].北京:中國(guó)科學(xué)院研究生院,2012:35-43.HE Zai-min.Research on code tracking accuracy for satellite navigation signals[D].Beijing:Chinese Academy of Sciences,2012:35-43.
[8]LIU A,AN J,WANG A.Effect of transform domain interference suppression on PN code tracking loops[C]∥2010 12th IEEE International Conference on Communication Technology.Nanjing:IEEE,2010:1064-1067.
[9]LIU Y,RAN Y,KE T,et al.Code tracking performance analysis of GNSS signal in the presence of CW interference[J].Signal Processing,2011,91(4):970-987.
[10]RTCA DO-229D,Minimum operational performance standards for global positioning system/wide area augmentation system airborne equipment[S].Washington,DC:RTCA,2006.
[11]KAPLAN E D,HEGARTY C J.GPS 原 理 與 應(yīng) 用[M].寇艷紅,譯.北京:電子工業(yè)出版社,2012:258-265.
[12]LEE Y,BRAFF R,F(xiàn)ERNOW J,et al.GPS and Galileo with RAIM or WAAS for vertically guided approaches[C]∥Proceedings of the Institute of Navigation GNSS.Long Beach:Institute of Navigation,2005:1801-1825.
[13]劉家興.衛(wèi)星定位精度和自主完好性的改進(jìn)[D].北京:清華大學(xué),2008:25-27.LIU Jia-xing.Improvement of satellite positioning sccuracy and sutonomous integrity[D].Beijing:Tsinghua University,2008:25-27.
[14]代長(zhǎng)勇,常青,陳媛.多系統(tǒng)衛(wèi)星導(dǎo)航接收機(jī)自主完好性監(jiān)測(cè)[J].遙測(cè)遙控,2010,31(6):11-15.DAI Chang-yong, CHANG Qing, CHEN Yuan.Multi-system satellite navigation receiver autonomous integrity monitoring[J].Journal of Telemetry,Tracking and Command,2010,31(6):11-15.
[15]RTCA DO-229D,Minimum operational performance standards for airborne supplemental navigation equipment using global positioning system (GPS).Washington,DC:RTCA,1991.
[16]許龍霞,張慧君,李孝輝.多模衛(wèi)星導(dǎo)航系統(tǒng)的RAIM算法研究[J].時(shí)間頻率學(xué)報(bào),2011,34(2):131-138.XU Long-xia,ZHANG Hui-jun,LI Xiao-hui.Study on RAIM algorithm of multi-mode navigation system [J].Journal of Time and Frequency,2011,34(2):131-138.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
