無人機航測成圖概況
2015-07-21 21:04:37龍午
科技資訊 2015年16期
龍午
摘要:隨著我國現代化步伐的加快,無人機航拍具有的優點,注定其將在我國各行業建設事業中發揮重要作用,本文通過介紹無人機開展航拍所需具備的基本要素和航拍數據采集流程,以及最終形成符合要求的大比例尺地圖的數據設計,為無人機的應用做了概況性介紹。
關鍵詞:無人機 航測 數據采集
中圖分類號:TV211文獻標識碼:A 文章編號:1672-3791(2015)06(a)-0000-00
1 引言
無人機航測作為對信息數據采集的一種方式,與傳統的數據采集及更新方式相比,無人機航攝系統擁有低成本、高效率,快速及時獲取高分辨率大比例尺影像的優勢,是傳統數據采集及更新方式的有效補充。其擁有對天氣的適應性強、拍攝成圖精度高、同時間內無人機拍攝覆蓋面比傳統作業大、拍攝成本也比傳統作業低的四個優點。可以采集0.05m、0.1m、0.2m等各種分辨率的正射影像圖,經過處理后,可以制作符合國家標準的1:500、1:1000、1:2000、1:5000等各種比例尺的地形圖。可以廣泛應用于國家重大工程建設、災害應急與處理、國土監察和應急救災測繪數據獲取等方面。
2 無人機航測系統組成
無人機航測系統由硬件系統和配套軟件二部分組成,其中硬件系統由五部分組成:無人機飛行平臺、傳感器(數碼相機)、飛控系統、地面監控系統與遙控器以及地面運輸與保障系統,主要是保障對數據的采集。配套軟件部分主要有曝光點設計軟件、航攝質量快速檢查軟件、影像預處理軟件,主要是對采集的數據進行處理。最終生成符合國家標準的各種比例尺地形圖。
3 無人機航測成圖流程
本文無人機航測以基于數碼相機的超輕型飛機航空攝影測量儀器成圖為例。相比于基于全站儀的傳統數字測圖方法,無人機航測具有大視角、高精度、云下拍攝、無需專用機場、低成本、高效率等特點,在國土資源管理及其他各領域工作中具有很大的潛力。
無人機航測用于測圖主要分為數碼相機的檢校、航攝外業測量及內業數據處理3個步驟。
3.1 數碼相機檢校:數碼相機為非量測相機,光學畸變大。理想成像條件下,像點、投影中心和相應地面點間應該滿足共線條件方程式,受攝影物鏡的光學畸變、CCD不平整等因素的影響,使得像點、相機的投影中心和地面坐標的共線方程受到破壞,其結果勢必影響攝影測量的精度。檢校是基于多片空間后方交會的數學解算模型,該模型以共線條件方程為基礎,把控制點的物方空間坐標視為真值,整體求解像片內方位元素、多張像片外方位元素及附加參數。
3.2 外業測量:包括布置控制點、影像獲取及影像質量檢查三個步驟。布置控制點可采用常規測量手段來獲取其坐標(通過GPS測量、像片聯測、空三等方法),分為全野外布點和非全野外布點,全野外布點精度較高,但外業工作量很大;非全野外布點野外只測定少量控制點主要由內業采用電算加密所得。影像采集直接采用大面陣數碼相機來獲取;數據質量檢查通過影像拼接軟件完成,在現場即可判斷影像拍攝是否成功,以便決定是否需要重飛某條航線或補拍某些像片。
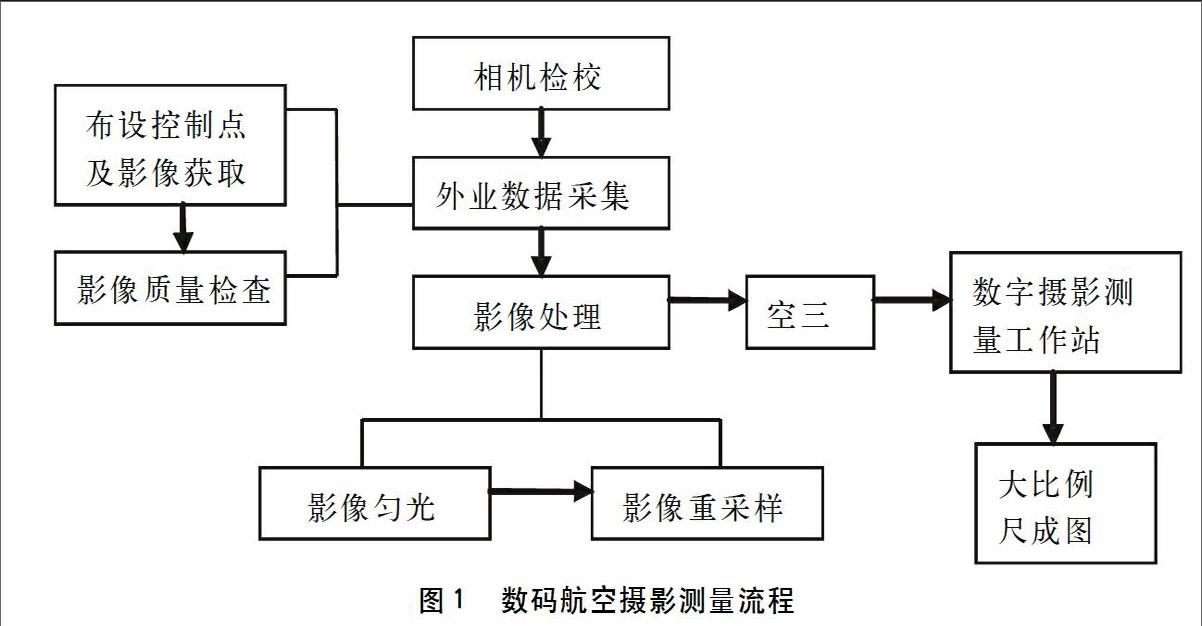
3.3 內業數據處理:主要包括影像零級處理及成圖,零級處理包括影像勻光與影像重采樣。利用空三加密軟件對零級處理后的影像進行空三加密,并在數字攝影工作站上最終獲取大比例尺圖或其他產品。如下圖所示。
數碼航空攝影測量流程
4 成圖比例尺的確定
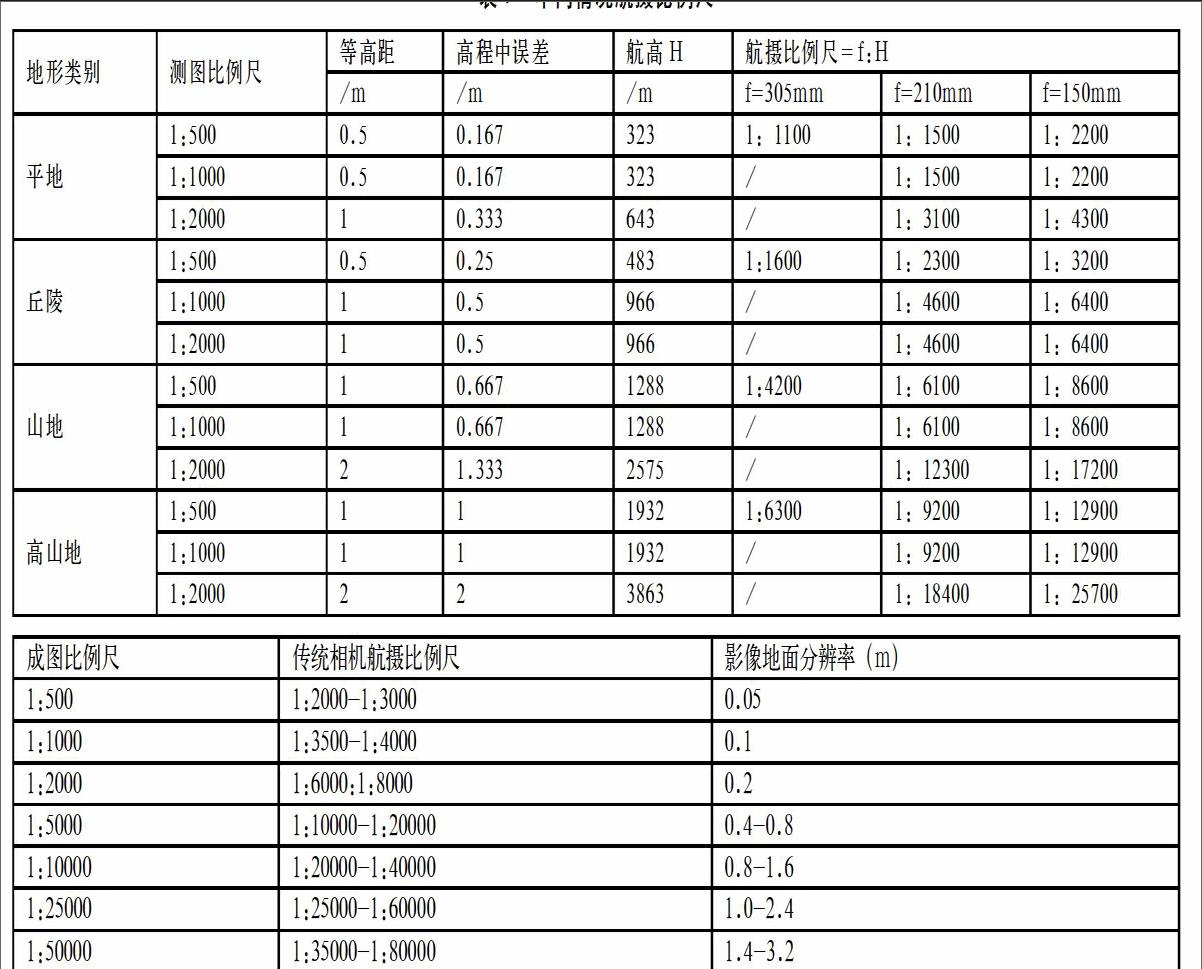
航測比例尺是航測像片上的線段長度與相應實地水平距離之比,由焦距與航高之比來確定。通過對測圖進行放大到可得到1:500、1:1000等成圖比例尺。
地形圖的精度主要體現在平面精度方面。航測比例尺對平面精度的影響不太顯著,而著重要考慮的是其對高程精度的影響,即航攝比例尺對高程中誤差的影響,依據不同高程中誤差計算相應航高,然后用航攝機焦距f與航高h之比,即可求得相應的航攝比例尺。
不同情況航攝比例尺
5 結語
與傳統數據采集手段相比,無人機航測具有機動靈活、高效快速、精細準確、作業成本低、適用范圍廣、生產周期短等多項特點,但同時作為與傳統的數據采集完全不同的一種生產方式,其也有著對作業硬件、軟件有更高投入和對操作人員素質有更高要求的特點。隨著我國各行業、各領域加快信息化建設步伐的要求,無人機的應用必將得到更進一步的提升。
參考文獻:
[1] 劉洋,祁瓊,無人機航攝技術在國土資源領域的應用地理空間信息 2014(2)
[2] 李軍,盛新薄,夏志宇,無人飛行器低空攝影技術探討 測繪科學2011(4)
[3] 洪宇,龔建華,胡社榮,黃明祥,無人機遙感影像獲取及后續處理探討 遙感技術與應用2008(8)
猜你喜歡
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
科技視界(2016年22期)2016-10-18 14:30:27
中國新通信(2016年16期)2016-10-18 10:44:22
企業導報(2016年9期)2016-05-26 20:58:26
