輸電線路清障裝置系統設計
2015-07-21 22:41:45韋丹靜王德龍韋賢亮孔繁業
中國高新技術企業 2015年28期
韋丹靜 王德龍 韋賢亮 孔繁業
摘要:輸電線路清障機構是當前線路維護中的重點研究對象之一,是一個涉及多個學科的復雜機電一體化系統。文章從實用性出發,研究了一種輸電線路巡線清障裝置,采用雙輪支撐同側結構設計,外加圓形鋸盤清障的工作方式,利用視頻信息采集與傳輸、地面遙控等方式對巡線過程的裝置動作操控以及對是否清理障礙物等做出決策。
關鍵詞:輸電線路;清障裝置;巡線裝置;機電一體化;動作操控 文獻標識碼:A
中圖分類號:TP242 文章編號:1009-2374(2015)28-0022-02 DOI:10.13535/j.cnki.11-4406/n.2015.28.011
1 概述
高壓輸電線路是長距離輸配電的主要方式,由于線路長期暴露在自然環境中,會受到各種惡劣天氣等不可控因素的影響,可能會導致線路元件故障,威脅電力系統的安全穩定運行,因此輸電線路巡檢就成了一項基礎但非常重要的工作。但隨著輸電線路數量的爆炸式增長,輸電線路的布線也更加復雜,靠傳統的人工巡檢方式已經不足以滿足線路巡檢需要。因此研發自動化的輸電線路巡檢裝置就具有很強的必要性,同時也成為了當前研究的熱點之一。
國內各科研機構、高等院校等也在巡線機器人方面做出了很多研究,但很大程度上遭遇機器人機械結構和自主控制方面的難題,在機器人自主控制方面面臨實用化障礙,但輸電線路的巡線清障需要已經非常迫切。因此本文從實際出發,即以輸電線路巡線清障裝置為研究對象,設計了一種基于地面操控的巡線清障裝置,并從系統設計的角度對該裝置的功能進行設計,使之滿足輸電線路巡線清障的需求。
2 巡線清障裝置的總體功能設計
本次設計中的主要設計任務為:采用遠程遙控方式,代替線路運行人員對導線異物進行帶電消除,并對探視圖像進行分析和判斷,及時對線路進行探傷并完成異物消除工作,項目的實施可解決輸電線路檔距中間漂浮異物無法帶電消除的問題,大幅提高線路清障的效率,全面提高線路的可靠性和安全穩定性。
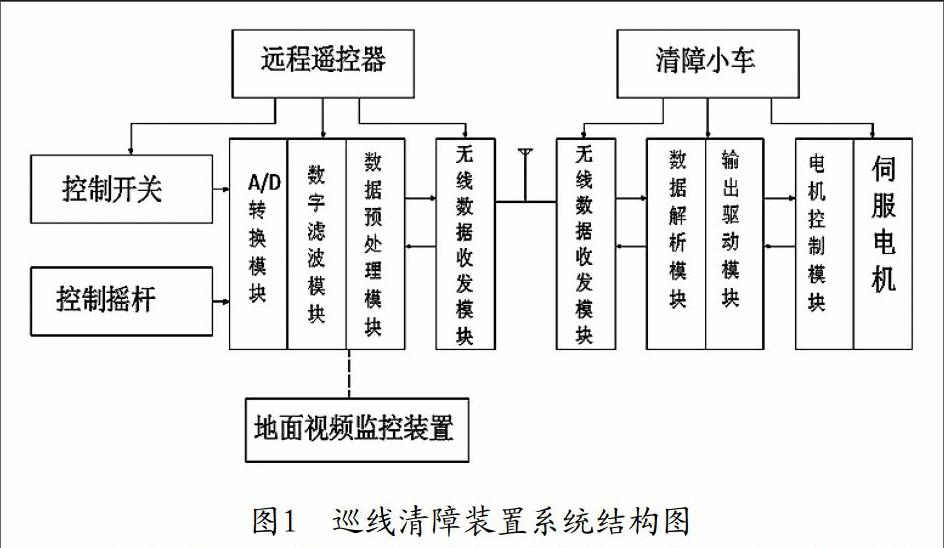
為完成上述設計任務,本文中所設計的巡線清障裝置可簡稱為線路異物清障車系統(下文簡稱清障車),該裝置是一個復雜的機電一體化系統,涉及機械結構、遙控、通信、多傳感器信息融合、電源技術等多個領域。在上述各子系統中,關鍵問題之一是機械機構、地面遙控等,現分別對各主要功能模塊進行設計,各主要部分的組成如圖1所示:
在完成系統總結構設計的基礎上,現分別對各主要部分進行設計。
3 機械結構設計
清障車在線路上的工作方式特殊,因此在設計時應充分考慮其工作環境的特殊性。在本次設計中,主要設計要求包括:(1)從實用的角度要求機構小巧、緊湊、輕質,便于攜帶及上下線操作,在故障情況下,應防止除異物清障車摔落;(2)從運動控制的角度要求機構的自由度盡量少,能實現解耦控制,并且具有符合要求的控制精度。由于清障裝置還應具備清障功能,故在機械機構設計時,按行走機構和清障機構兩部分來進行描述。
3.1 清障裝置行走機構設計
清障裝置的行走機構的主要功能是完成在輸電線路上的穩定行走和翻越障礙,在功能設計方面主要包括:(1)具有三個速度等級和前進、后退兩個方向功能,線上清障機采用雙輪支撐同側結構設計,使得上線更為容易,同時配合大摩擦系數的行走輪及大轉矩電機,使車體具備一定的爬坡和制動能力;(2)行走輪經2個電機分別同時驅動,提高裝置在線路上行走的穩定性,同時也可以確保動力可靠,不至于出現一個輪被卡的情況;(3)電機具備自鎖性,當馬達沒電的情況下可自動鎖定,無法轉動;(4)減速箱輸出軸方向與馬達軸方向垂直設計,便于安裝帶動設備;(5)在輸電線路帶電運行情況下對輸電線路進行檢測,抗電磁干擾能力強、傳輸距離遠;(6)設備體積小、重量輕、結構設計緊湊、功能齊全、操作方便、安全可靠。
3.2 清障裝置的清障機構設計
當地面操作人員確定需要進行清障操作時,就需要用清障裝置的清障機構來完成該工作。在本設計中,清障裝置的主要清理任務是清理輸電線路檔距中間漂浮異物,在設計時采用可地面控制的圓形鋸盤來實現。其工作原理是采取高速直流電機帶動圓鋸片,利用高速轉動將異物打碎,同時增加鋸齒功能;對該圓形鋸盤采用遠程遙控控制方式,以電子調速模塊控制,實現對小型圓盤鋸的控制。
4 視頻系統設計
本設計中清障車工作流程為:首先通過絕緣斗臂車或人工爬到線塔上用吊裝的方式將小車安裝到相線上;然后地面監控計算機或者控制裝置發出開機控制命令,清障車本體計算機在接收到運行命令后,驅動清障車沿輸電線行走;行走過程中,檢測裝置不斷檢測前方異物的情況,同時視頻對線路進行拍攝,拍到的圖像通過無線設備實時傳輸到地面,地面工作基站對線路情況進行判斷,決定是否對線路上的異物進行清除;對清障車本身的工作狀態進行監控,決定是否對清障車的運動給予干預。
由其工作流程可見,清障車傳回的視頻信息對于地面人員決策至關重要。因此本設計中很自然地就需要設計視頻系統。在視頻系統中,主要的組成部件是攝像頭和無線通信模塊。其中攝像頭方面為了滿足地面控制需要,需滿足高清需求,這方面可供選用的USB攝像頭是比較多的,很容易滿足設計要求。在無線通信模塊方面,主要是選用具有多功能支持的WIFI模塊,支持IEEE802.1 1b/g無線標準、支持基礎網和自組網、支持多種ICMP、DHCP、DNS和HTTP等。這方面可供設計選型的無線通信模塊也比較多,本次設計中選用的是Marvel 8686wifi模塊。
5 地面操控系統設計
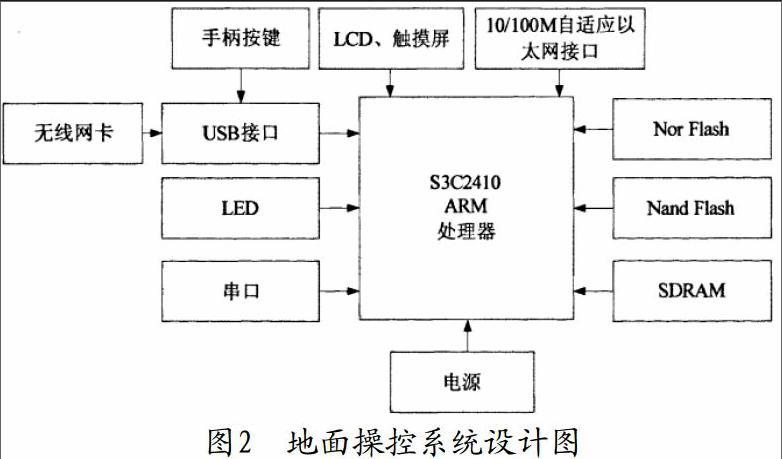
由前文對清障車的工作流程描述可見,清障車要完成其設計任務的另一關鍵環節是地面操作人員依據清障車傳回的視頻數據做出決策,因此地面操控系統的設計是重點之一。本文中所設計的地面操作系統主要通過接收清障車返回的視頻數據,地面操作人員依據視頻信息做出決策,以手柄/按鍵的方式來實現對線上清障車的運動或清障操作。地面操控系統的主要結構如圖2所示:
在地面操控系統中,需要以一個高性能的處理器為核心,并為無線網卡、視頻接收、控制信息發送、顯示屏等附屬部件提供數量充足、性能穩定的接口。在本文的設計中,主要的硬件接口預留為:(1)LCD、LED、觸摸屏,接口該類接口是顯示清障車傳回數據的關鍵部件;(2)網絡接口,這類接口包括以太網接口和無線網卡接口,其中以太網接口與處理器直接相連,無線網卡則通過中間USB接口間接與處理器相連;(3)電源接口;(4)串口,為了為系統容量擴充留下余地,還特地留了Nor Flash接口、Nand Flash接口以及SDRAM接口。
6 結語
輸電線路巡線裝置的設計是一個復雜的機電控制問題,涉及到機械結構、地面控制等多個方面,是值得深入研究的問題。本文從實用的角度設計了基于地面操控的巡線清障裝置,在巡線裝置返回實時準確的視頻數據的前提下由地面控制人員決定裝置的行走和清障動作,可滿足實用需要,以后將考慮進一步提高裝置的智能化水平,以具備自我控制的巡線機器人作為研究目標。
參考文獻
[1] 吳功平,肖曉暉,郭應龍,胡基才.架空高壓輸電線自動爬行機器人的研制[J].中國機械工程,2006,17(3).
[2] 左岐,謝植,梁自澤,唐健隆,孫德輝,劉仁學.巡線機器人的發展與應用[J].機器人技術與應用,2007,(2).
[3] 吳功平,肖曉輝,肖華,戴錦春,鮑務均,胡杰,等.架空高壓輸電線路巡線機器人樣機研制[J].電力系統自動化,2006,30(13).
[4] 田樂.基于地面操控的高壓輸電線路巡線裝置研究[D].蘭州理工大學,2012.
[5] 易興邦.高壓巡線機器人控制系統研究[D].江蘇科技大學,2012.
(責任編輯:周 瓊)
猜你喜歡
經濟師(2016年10期)2016-12-03 11:18:31
智富時代(2016年12期)2016-12-01 16:43:06
中國科技縱橫(2016年17期)2016-11-30 22:05:38
職業·中旬(2016年10期)2016-11-28 20:17:37
中國科技博覽(2016年22期)2016-11-01 18:19:47
中國科技博覽(2016年19期)2016-10-19 13:11:05
科學與財富(2016年28期)2016-10-14 20:23:24
科學與財富(2016年28期)2016-10-14 20:19:20
科學與財富(2016年28期)2016-10-14 04:19:29
科學與財富(2016年28期)2016-10-14 03:48:23