基于CC2530的人員輔助定位裝置的設計與實現
2015-07-18 12:58:30廖曦文趙晴
物聯網技術 2015年5期
廖曦文++趙晴


摘 要:介紹一種基于CC2530的人員輔助定位裝置,講述125 kHz信號的調制發射、曼徹斯特編碼在RFID中的使用和2.4 GHz無線通信的應用。該輔助定位裝置不僅可以根據不同的應用環境靈活調整功能,方便進行遠程操作,還具有低成本、可靠性強等優勢。
關鍵詞:CC2530;RFID;MAX487;人員定位;曼徹斯特編碼
中圖分類號:TP368.1 文獻標識碼:A 文章編號:2095-1302(2015)05-000-03
0 引 言
現今,多頻RFID組合人員定位系統廣泛用于養老院、監獄、部隊等地方,已成為一種較為常用的定位方式。但遺憾的是,目前應用的大多數系統中,125 kHz低頻輔助定位裝置仍存在著一些問題,如無法與控制系統進行通信,激勵通道數較少等。
本文介紹了一種可以監聽2.4 GHz讀寫器、激活125 kHz電子標簽的輔助定位裝置。該裝置以CC2530為核心,利用芯片自身無線收發器和RS-485通信接口芯片MAX487,可實現多重通信。此外,它完成了六通道125 kHz信號的調制輸出,可減少現場系統中輔助定位裝置的使用數量,從而有效降低系統成本。
1 人員定位系統介紹
人員定位系統底層設備主要包括標簽、2.4 GHz讀寫器和輔助定位裝置,上層裝置主要由服務器、控制中心組成,其整體架構如圖1所示。該定位系統主要應用于精神疾病醫院,醫護人員攜帶標簽在醫院活動,當其進入某個放有125 kHz矩形天線區域時,標簽將被輔助定位裝置激活——標簽將自身ID、獲取的輔助定位裝置的通道ID和RSSI值[1]打包通過2.4GHz無線通信方式發送給讀寫器,這些獲取的數據再由讀寫器通過交換機匯聚到服務器,最終監控中心可以通過服務器的數據解析直觀地在室內圖形界面上顯示人員的具體位置[2]。當出現緊急情況時,醫護人員還可以按下標簽報警按鈕,實現快速定位報警。
2 輔助定位裝置的設計原理
人員定位系統主要根據接收信號強度來估計位置[3],為了輔助系統定位而加入了輔助定位裝置,如在房間內外放置該裝置的125 kHz天線,電子標簽進入該范圍后被激活,并將天線通道ID上傳,從而輔助系統判斷標簽在房間內還是房間外。該裝置是有源RFID隨機跳頻系統的重要組成部分,其系統結構如圖2所示。
圖1 人員定位系統架構圖
圖2 輔助定位裝置系統框圖
裝置的主控制器采用CC2530芯片,其可對數據進行編碼并將編碼后的數據調制成125 kHz信號,調制后的信號由射隨電路進行電流放大,再由驅動器TC4421/TC4422驅動天線將其發射輸出。CC2530還可外接極少器件實現2.4 GHz通信,上位機可以利用讀寫器發送2.4 GHz無線信號從而實現控制輔助定位裝置低頻信號開關、激活間隔時間、更改通道ID等功能。外接的信號指示燈用于顯示裝置工作狀態。
3 系統硬件設計
3.1 微控制器模塊
CC2530是TI公司推出的一款兼容IEEE802.15.4的多功能片上系統[4],可為無線通信提供廣泛的硬件支持。該芯片集成了增強型8051內核,提供多達18個中斷源,具有8 kb的超低功耗SRAM,還允許開發者設計各種不同應用的外設,如多數量、多模式定時器,ADC,I/O控制器等。
微控制器的RF內核控制模擬無線電模塊,通過RF_N和RF_P引腳外接少量電容電感與天線即可實現2.4 GHz無線通信的硬件電路。微控制器還通過6個I/O口輸出125 kHz信號,其中引腳P0.2與P0.3,P1.6與P1.7,P1.0與P1.1三組I/O口映射為定時器1,定時器3和定時器4的外設I/O口,并與外圍射隨電路相連。
3.2 射隨電路
射隨電路是將信號從基極輸入,發射極輸出的放大電路,其電壓放大系數略低于1,具有一定的電流放大功能。該部分電路主要功能是:一方面將6路I/O口輸出的調制PWM信號進行電流放大,提高MOSFET驅動器的輸入電流;另一方面作為I/O口與驅動器之間的緩存器,可以減少兩個電路直接相連所帶來的影響。射隨電路中的一組電路原理如圖3所示。
圖3 射隨電路原理圖
3.3 驅動電路
驅動電路是將較小的PWM信號進行放大,用以驅動外接的天線電路,其能夠實現125 kHz信號的發射。該電路采用TC4421和TC4422芯片,其中TC4421是反向驅動器,TC4422是正向驅動器。這兩種型號的驅動器具有寬輸入供電電壓,低輸出阻抗,高連續輸出電流等優點。6路PWM信號被分成3組,每組2路,第1組和第3組與TC4421連接,第2組與TC4422連接,這樣相鄰信號相位剛好相差180°,避免了各組信號之間的干擾。輸出端口與天線之間串接了電位器,方便調節激活范圍。驅動電路原理圖如圖4所示。
3.4 電源模塊
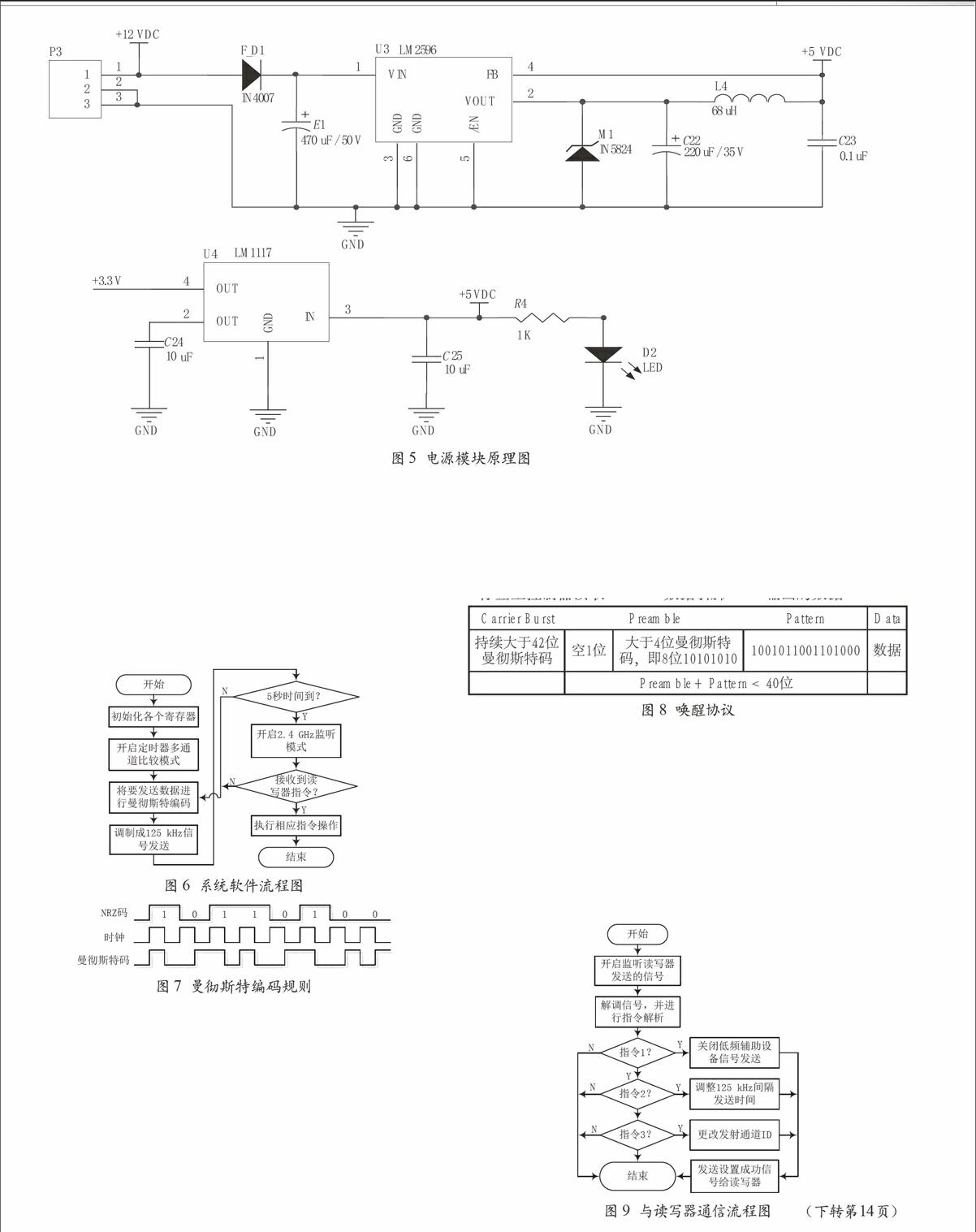
電源部分主要由LM2596和LM1117芯片構成。LM2596具有較寬的輸入電壓范圍,輸出電壓可調,輸出電流高達3 A等優點,外部電源經開關電壓調節器LM2596后變為5 V輸出,此電壓作為MAX487的供電電壓。LM1117具有多種電壓輸出,電流限制和熱保護,輸出電流高達800 mA等特點,5 V電源經過線性穩壓器LM1117后變為3.3 V輸出,此電壓作為微控制器CC2530和射隨電路供電電壓。電源模塊原理如圖5所示。
4 軟件設計
本設計采用集成開發環境IAR作為軟件開發平臺。首先要對單片機的內部寄存器進行初始化,其中3個定時器需設置為比較切換輸出模式,對計數器和通道比較寄存器中的內容進行比較,生成PWM信號。接著是將要輸出的數據進行曼徹斯特編碼,將其調制在125 kHz載波上形成所需的激勵信號,不斷往外發送。每次到達5秒時間后,輔助定位裝置會自動進入RF接收模式,用來監聽讀寫器發送的控制指令,如果在指定時間內收到指令,則執行相應任務,否則將繼續執行激活任務。系統軟件流程如圖6所示。
4.1 曼徹斯特編碼
曼徹斯特編碼是一種同步時鐘的編碼技術,其對所要發送的數據進行編碼的方式是在數據位中間產生跳變,從高往低跳表示1,從低往高跳表示0[5]。曼徹斯特編碼規則如圖7所示。雖然一位碼元變成了高低電平,速率降為一半,但是這樣去除了零頻率成分,提高了抗干擾性。在RFID系統中,常將NRZ碼進行曼徹斯特編碼后再調制,而不是直接調制NRZ碼。
在編碼調制過程中,定時器1、定時器3和定時器4必須同時開啟或關閉,目的是同步信號。過程是:先同時開啟3個定時器,延時350 us,然后同時關閉定時器,再延時350 us。延時過程中定時器通過比較切換輸出將曼徹斯特碼1進行調制,相反操作則將曼徹斯特碼0進行調制。
圖6 系統軟件流程圖
圖7 曼徹斯特編碼規則
4.2 激勵信號調制
輔助定位裝置需要發射指定的激勵信號才能喚醒電子標簽。電子標簽中的AS3932芯片能通過125 kHz天線監聽信號,將接收到的信號送至內部解調器解調信號,對數據自動進行曼徹斯特碼解碼并恢復時鐘,得到需要的數據。
只有特定的喚醒協議才能喚醒AS3932,喚醒協議如圖8所示。輔助定位裝置初始載波脈沖串需要長達42位曼徹斯特符號,空1位符號后再發送大于4位曼徹斯特碼的調制信號,即10101010的特定格式,然后再發送存儲在AS3932寄存器R6、R5中的喚醒模式碼,整個前導碼和喚醒模式碼的總位數應小于40位,最后發送定位所需的通道ID等數據信息。如果標簽接收的模式碼正確,則拉高芯片的WAKE引腳,喚醒標簽主控制器讀取AS3932數據引腳DAT輸出的數據。
Carrier Burst Preamble Pattern Data
持續大于42位曼徹斯特碼 空1位 大于4位曼徹斯特碼,即8位10101010 1001011001101000 數據
Preamble + Pattern < 40位
圖8 喚醒協議
4.3 監聽讀寫器
輔助定位裝置在一定時間內開啟監聽讀寫器的功能,通過解調讀寫器發送的控制信號,可根據相應指令執行裝置的激勵信號開關,發射間隔時間調整,或者更改裝置通道ID等功能。需要注意的是,為避免信道相同導致通信受干擾,讀寫器與輔助定位裝置之間的2.4 GHz無線通信信道需不同于標簽之間的通信信道。輔助定位裝置與讀寫器通信流程如圖9所示。
圖9 與讀寫器通信流程圖
輔助定位裝置處于未監聽狀態時不能收到2.4 GHz信號,因此讀寫器發送控制指令給輔助定位裝置有一定的失敗率,需要多次發送信號以確保收到輔助定位裝置的反饋信號。
5 結 語
本裝置以CC2530為核心,利用自身RF內核控制無線模塊進行2.4 GHz無線通信,同時將指定數據進行曼徹斯特編碼,再將其調制成125 kHz信號用以喚醒電子標簽,起到輔助定位作用。經測試,該低頻輔助裝置可以激活一定范圍內的標簽,讀寫器能夠準確獲取帶有激勵通道ID和RSSI值的標簽信息,在室內圖形界面上能顯示標簽具體位置,能夠實現遠程操作,具有很好的擴展性和很強的實用價值。
參考文獻
[1] 方震,趙湛,郭鵬,等.基于RSSI 測距分析[J].傳感技術學報,2007,20(11) :2526-2530.
[2] 陳軍慧,楊登輝,黃慧冬. 基于半有源RFID技術的人員跟蹤定位系統[J]. 現代電子技術,2014,37(18):130-132.
[3] Samer SSaab , Zahi S.Nakad. A Standalone RFID Indoor Positioning System Using Passive Tags[J]. IEEE Transactions on Industrial Electronics,2011,58(5):1961-1970.
[4] 鄭茂全,侯媛彬. 基于CC2530的井下人員信息采集模塊設計[J]. 工礦自動化,2012,38(6): 7-10.
[5] 段爭云,屈菲,李書濤. 基于C8051F300的曼徹斯特譯碼的軟件實現[J].電子技術,2007,36(11): 141-143.
