基于MATLAB的給定連桿預(yù)定位置的四桿機(jī)構(gòu)設(shè)計
2015-07-18 11:24:42韓二豹
新技術(shù)新工藝 2015年6期
韓二豹
(陜西工業(yè)職業(yè)技術(shù)學(xué)院,陜西 咸陽 712000)
基于MATLAB的給定連桿預(yù)定位置的四桿機(jī)構(gòu)設(shè)計
韓二豹
(陜西工業(yè)職業(yè)技術(shù)學(xué)院,陜西 咸陽 712000)
連桿機(jī)構(gòu)是一種典型的機(jī)械機(jī)構(gòu),其運(yùn)動設(shè)計是一個比較復(fù)雜和困難的問題。對于給定連桿預(yù)定位置的四桿機(jī)構(gòu)的設(shè)計,常用的設(shè)計方法為解析法。以MATLAB語言為基礎(chǔ),利用計算機(jī)對給定連桿預(yù)定位置的四桿機(jī)構(gòu)進(jìn)行設(shè)計。結(jié)果表明,該方法設(shè)計過程簡潔,結(jié)果合理、準(zhǔn)確,效率高。
四桿機(jī)構(gòu);MATLAB;預(yù)定位置
MATLAB是一種高級技術(shù)語言和開發(fā)環(huán)境[1],它提供了一個人機(jī)交互的系統(tǒng)環(huán)境,并以矩陣作為基礎(chǔ)的數(shù)據(jù)結(jié)構(gòu),節(jié)省編程時間,語法簡單,容易掌握,調(diào)試方便,可以設(shè)置調(diào)試斷點(diǎn)、快速查找程序錯誤等。MATLAB將使用者從繁重、重復(fù)的計算中解脫出來,已經(jīng)被大家認(rèn)可和廣泛使用,充分展現(xiàn)了高效、直觀和簡單的特點(diǎn)。MATLAB是用于分析數(shù)據(jù)、開發(fā)算法和應(yīng)用面向函數(shù)的語言,可以方便地進(jìn)行工程數(shù)值分析、優(yōu)化分析、數(shù)據(jù)處理和自動控制,也可以實(shí)現(xiàn)計算可視化、圖形繪制圖像處理和仿真等功能,在工業(yè)和研究領(lǐng)域具有極大的使用價值,逐漸成為優(yōu)化領(lǐng)域的主要工具之一。MATLAB可以快速解決傳統(tǒng)辦法很難解決的問題,在實(shí)際應(yīng)用中具有很大的優(yōu)勢。
1 設(shè)計步驟[2-3]
1)建立可靠的優(yōu)化設(shè)計的數(shù)學(xué)模型及約束條件。
2)根據(jù)參數(shù)的數(shù)學(xué)模型運(yùn)用MATLAB進(jìn)行編程[4],確立主程序和子函數(shù)并進(jìn)行調(diào)試和求解運(yùn)算。
3)給定參數(shù),估算初始值,利用函數(shù)求解,得到結(jié)果。
4)結(jié)果分析。
2 可靠性數(shù)學(xué)模型的建立
四桿機(jī)構(gòu)如圖1所示,設(shè)計該機(jī)構(gòu)的核心是求活動鉸鏈中心B和C。在機(jī)架建立固定坐標(biāo)系oxy,以M為原點(diǎn),在連桿上建立動坐標(biāo)系Mx'y',M→N為x'軸的正向。點(diǎn)B、C在動坐標(biāo)系的坐標(biāo)為(xB',yB')、 (xC',yC'),在固定坐標(biāo)系的坐標(biāo)為(xB,yB), (xC,yC),可以得到:
(1)
(2)
式中,φi為x軸正向至x'軸正向沿逆時針方向的夾角。
(3)
固定鉸鏈中心A、D在固定坐標(biāo)系中的位置坐標(biāo)為 (xA,yA)、(xD,yD),可以得到:
(xBi-xA)2+(yBi-yA)2=(xB-xA)2+(yB-yA)2(i=1,2,3,…,n)
(4)
(xCi-xD)2+(yCi-yD)2=(xC-xD)2+(yC-yD)2(i=1,2,3,…,n)
(5)
如果事先給定A、D的位置,利用上述公式,可以精確實(shí)現(xiàn)連桿3個預(yù)定位置的計算,式4和式5還可以劃歸為線性方程求解[5]。
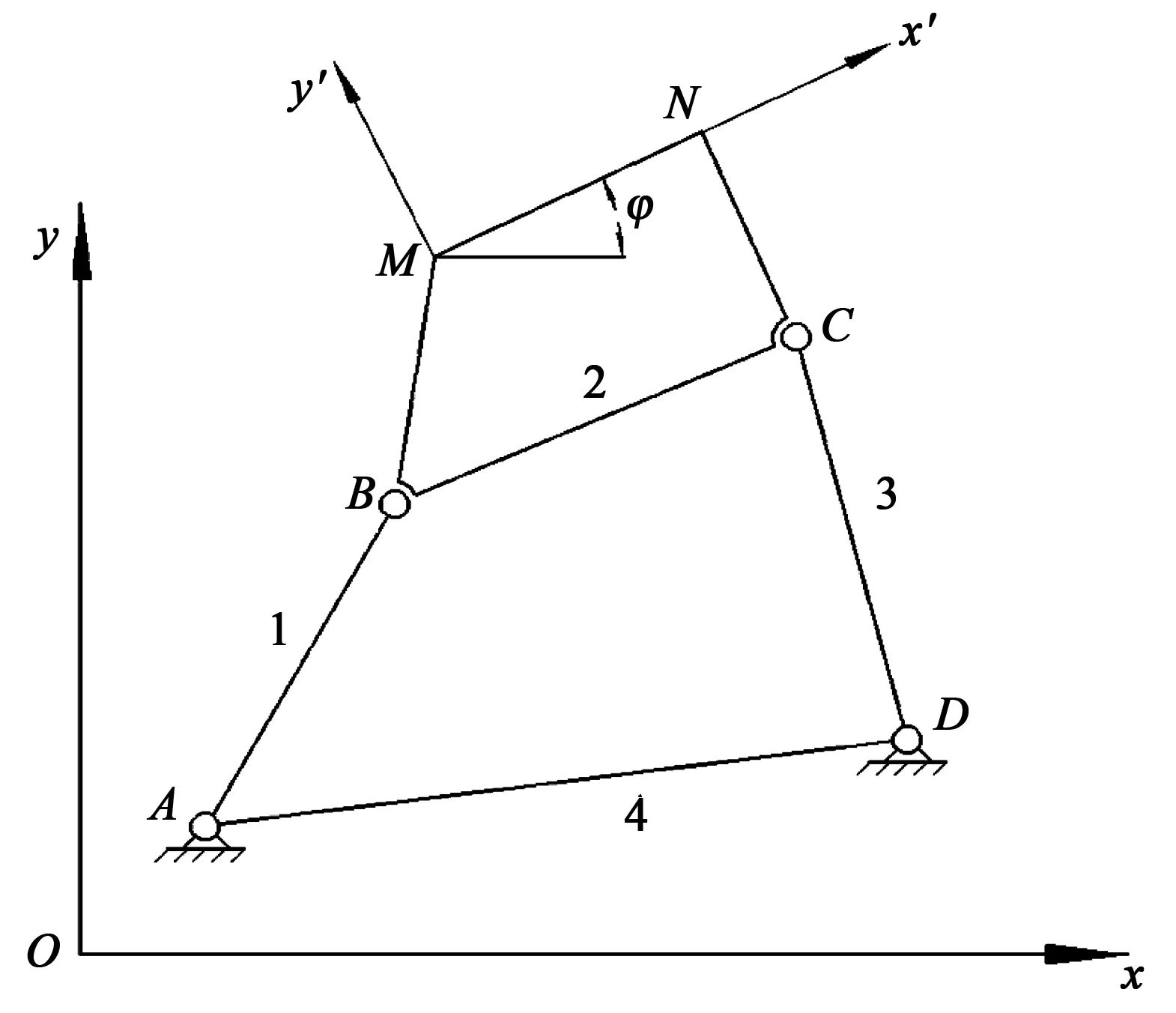
圖1 四桿機(jī)構(gòu)
3 優(yōu)化設(shè)計實(shí)例
已知連桿2的3個位置:xp1=10 mm,yp1=35 mm,φ1=53°;xp2=34 mm,yp2=40 mm,φ2=30°;xp3=40 mm,yp3=27 mm,φ3=0°。選定機(jī)架上2個固定鉸鏈坐標(biāo)為A(0,0)、D(60,0),設(shè)計以該剛性構(gòu)件為連桿的鉸鏈四桿機(jī)構(gòu)。編寫的MATAB 程序由link_fun_Main、link_fun_B和 link_fun _C等3部分組成。
link_fun_Main
clear; xp1=10; yp1=35; phi1=53*pi/180; xa=0,ya=0;xd=60;yd=0;
% AB 長度的計算
x=[0;0]; x=fslove(@link_fun_B,x);
xb1=xm1+x(1)*cos(phi1)- x(2)*sin(phi1);
yb1=ym1+x(1)*sin(phi1)+x(2)*cos(phi1);xb=xb1;yb=yb1;
% CD 長度的計算
X=[35;46];x=fslove(@link_fun_c,x);
xc1=xm1+x(1)*cos(phi1)- x(2)*sin(phi1);
yc1=ym1+x(1)*sin(phi1)+x(2)*cos(phi1);xc=xc1;yc=yc1;
% BC長度的計算
lbc=sqrt((xc1-xb1) ^2+(yc1-yb1) ^2)
lad=sqrt((xa-xd) ^2+(ya-yd) ^2)
% 輸出
disp(' 結(jié)果1:BC 坐標(biāo)(單位 mm)')
disp(' x y ')
fprintf('B %3.2 f ',xb,yb);
fprintf('C %3.2 f ',xc,yc);
disp(' 結(jié)果2:各桿長度(單位 mm)')
fprintf('曲柄長度 %3.2 f ',lab);
fprintf('連桿長度 %3.2 f ',lbc);
fprintf('搖桿長度 %3.2 f ',lcd);
fprintf('機(jī)架長度 %3.2 f ',lad);
%子函數(shù)link_fun_B
Function F =link_fun_B(X)
xm=[10;34;40];ym= [35;40;27]; phi=[53;30;0]*pi/180;
xa=0;ya=0;
%求B在固定坐標(biāo)系的坐標(biāo)
For i=1:3
xb(i)=xm(i)+x(1)*cos(phi(i))- x(2)*sin(phi(i));
yb(i)=ym(i)+x(1)*sin(phi(i))+x(2)*cos(phi(i));
end;
%求B在固定坐標(biāo)系的方程
F=[(xb(2)-xa)^2+(yb(2)-ya)^2-(xb(1)-xa) ^2-(yb(1)-ya) ^2; (xb(3)-xa)^2+(yb(3)-ya)^2-(xb(1)-xa) ^2-(yb(1)-ya) ^2];
%子函數(shù)link_fun_C
Function F =link_fun_C(x)
xm=[10;34;40];ym= [35;40;27]; phi=[53;30;0]*pi/180;
xd=63;ya=0;
%求C在固定坐標(biāo)系的坐標(biāo)
For i=1:3
xc(i)=xm(i)+x(1)*cos(phi(i))- x(2)*sin(phi(i));
yc(i)=ym(i)+x(1)*sin(phi(i))+x(2)*cos(phi(i));
end;
%求C在固定坐標(biāo)系的方程
F=[(xc(2)-xd)^2+(yc(2)-yd)^2-(xc(1)-xd) ^2-(yc(1)-yd) ^2; (xc(3)-xd)^2+(yc(3)-yd)^2-(xc(1)-xd) ^2-(yc(1)-yd) ^2];
該程序運(yùn)行顯示結(jié)果如下:
結(jié)果1:B C 坐標(biāo)(單位 mm)
x y
B -3.26 -10.20
C 66.26 31.25
結(jié)果2:各桿長度(單位 mm)
曲柄長度 l1=10.72
連桿長度 l2=80.94
搖桿長度 l3=64.08
機(jī)架長度 l4=60.00
結(jié)果符合四桿機(jī)構(gòu)和曲柄存在條件。
4 結(jié)語
針對連桿機(jī)構(gòu)的運(yùn)動設(shè)計解析法和綜合法的復(fù)雜性和困難性,根據(jù)機(jī)構(gòu)運(yùn)動幾何關(guān)系,在建立數(shù)學(xué)模型的基礎(chǔ)上,運(yùn)用MATLAB軟件中的求解非線性方程、線性方程組和優(yōu)化計算功能, 可以方便、快捷、準(zhǔn)確地得到計算結(jié)果。
[1] 葛超,王蕾,曹秀爽.MATLAB技術(shù)大全[M].北京:人民郵電出版社,2014.
[2] 陳立德.機(jī)械設(shè)計基礎(chǔ)[M]. 2版.北京:高等教育出版社,2004.
[3] 李濱城,徐超.機(jī)械原理MATLAB 輔助分析[M].北京:化學(xué)工業(yè)出版社,2011.
[4] 李元科.工程最優(yōu)化設(shè)計[M].北京:清華大學(xué)出版社,2006.
[5] 周繼瑤.現(xiàn)代機(jī)械中的機(jī)構(gòu)優(yōu)化設(shè)計[J].企業(yè)科技與發(fā)展,2013(9):19-20.
責(zé)任編輯彭光宇
BasedontheGivenMATLABReservePositionDesignofFour-barLinkageConnectingRod
HAN Erbao
(Shanxi Polytechnic Intitute,Xianyang 712000,China)
The connecting rod mechanism is a kind of typical mechanical mechanism, its motion design is a complex and difficult problem, and the design method of common four bar mechanism given link predetermined location as the main analytical method. This paper is based on the MATLAB language, the design of four bar mechanism is linked to the predetermined position given by computer. The results show that this method is simple, and the result is reasonable, accurate, and high efficiency.
four bar mechanism,MATLAB,the predetermined position
TB 121
:A
韓二豹(1978-),男,講師,工程碩士,主要從事機(jī)械制造及自動化等方面的研究。
2015-01-29
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16