舞臺交流變頻調速吊掛設備0類急停沖擊載荷的仿真試驗研究
2015-07-18 11:33:02陳德潤龔奎成胡仁榮段慧文
演藝科技 2015年7期
關鍵詞:模型
陳德潤,方 劍,魏 星,龔奎成,胡仁榮,王 元,段慧文,李 利
(1.萬達文化旅游規劃研究院,北京 100022;2.原國家大劇院業主委員會,北京 100031;3.總裝備部工程設計研究總院 北京 100028)
舞臺交流變頻調速吊掛設備0類急停沖擊載荷的仿真試驗研究
陳德潤1,方 劍1,魏 星1,龔奎成1,胡仁榮1,王 元1,段慧文2,李 利3
(1.萬達文化旅游規劃研究院,北京 100022;2.原國家大劇院業主委員會,北京 100031;3.總裝備部工程設計研究總院 北京 100028)
針對舞臺交流變頻調速吊掛設備在0類急停工況下進行動力學模擬仿真研究和實物試驗驗證,分析0類停止時沖擊載荷的變化規律,得出此類舞臺吊掛設備的沖擊載荷數據,作為設計參考。
舞臺;吊掛設備;模擬仿真;0類急停;沖擊載荷
筆者將以舞臺交流變頻調速吊掛設備為對象,以系統動力學為理論基礎,通過動力學仿真模型計算和實物試驗相結合的方法,分析0類停止時沖擊載荷變化規律,提出沖擊載荷因子的取值范圍,供同類吊掛系統設計參考。
1 0類停止的基本概念
(1)按照GB 5226.1-2008《機械電氣安全 機械電氣設備 第1部分:通用技術條件》 9.2.2停止功能: 0類:用即刻切除機械致動機構動力的辦法停車(即不可控停止);9.2.5.3停止:根據機械的風險評價及機械的功能要求,應提供0類、1類或2類停止;當電源切斷開關操作時屬于0類停止;停止功能應否定有關的起動功能。
(2)按照GB 16754-2008《機械安全 急停 設計原則》 4.1.4急停功能:0類停機:通過以下方法停機:—立即切斷機器致動機構的動力源,或機械斷開(停轉)危險元件及其機器致動機構,必要時制動。
2 舞臺交流變頻調速吊掛設備介紹
2.1 吊掛設備主要性能參數
此系統通過三相鼠籠交流異步電動機和矢量變頻器驅動吊掛設備,此系統速度可調,最大速度為1.5 m/s,運動部分最大重量為500 kg,升降行程30 m,吊點數量1。物理模型及參數如圖1和表1。
2.2 驅動與傳動計算選型
纖維芯鋼絲繩直徑Φ10-18X7-FC-1570-48.7 KN-39 kg/100 m,靜態安全系數9.9。
滑輪直徑250 mm,卷筒直徑420 mm。計算電機凈功率7.5 kW,選用11 kW。
靜載扭矩1 029 N·m,最大轉速68.2 r/p。

圖1 吊掛設備的物理模型

表1 技術性能表

表2 性能參數表

圖2 技術研究路線示意圖
選用SEW減速電機KA77DV160M4,額定功率11 kW,額定輸出轉速71 r/p,額定扭矩1480 N·m,減速比i=20.25,徑向力15 900 N,使用系數1.00,質量120 kg。電機額定轉速1438 r/m,額定輸出扭矩73 N·m。額定升降速度1.56 m/s。
2.3 制動器的制動力矩
系統選用SEW電機DV160M4/DBM,配PRECIMA雙制動器,型號為FDD20 180VDC/21x25 N·m,性能參數如表2。
說明:t1DC——同時切斷直流和交流電路的電氣響應延遲時間;
t1AC——切斷交流電路的電氣響應延遲時間;t2——制動釋放響應時間。
2.4 控制系統設計
控制柜采用SEW變頻器,調速區間0.015 m/s~1.5 m/s,系統具有0類停止功能。雙制動器,一個快速制動,一個延時制動。設上下限位開關及極限開關共4個。
3 技術條件和技術路線
3.1 技術條件說明
(1)在不考慮高速軸轉動慣量和阻尼的情況下,簡單分析在緊急制動時鋼絲繩彈性產生的動載荷系數,并作為模型研究的初步參考。
(2)研究SEW制動器的結構原理,確定雙制動器在快/慢速制動時制動力矩和響應時間的動態輸出曲線。
(3)分析0類停止時,控制系統對制動器和電機的控制實現機理,研究系統負載扭矩、驅動扭矩和制動扭矩相互作用的瞬態特性。
(4)將滑輪作為一個阻尼元件考慮,考慮滑輪的轉動慣量,分析其在鋼絲繩拉力作用下的摩擦阻力關系。
(5)計算驅動系統的轉動慣量和負載質量,考慮滑輪的阻尼效應,以鋼絲繩為彈性元件,建立整個系統的動力學模型。以制動力矩曲線為激勵,計算系統的動力學響應。
(6)根據物理試驗的測試結果,修正理論模型中的軟參數,對計算結果和測試數據進行對比分析,總結出本項目要研究的主要技術指標。
3.2 技術研究路線
技術研究路線如圖2所示。
4 模擬仿真研究
4.1 模型建立與初步仿真
根據吊掛系統的物理模型,分別建立等效力學模型、解析模型、虛擬仿真模型,并分別用SIMULINK微分方程組數值求解與ADAMS虛擬仿真。
4.2 基本假設
在建立動力學模型之前,作出如下假設:
不考慮聯軸器及轉軸的扭轉彈性;考慮高速軸上的轉動慣量與被吊掛重物的重量;
考慮沿途所有滑輪的阻尼特性;鋼絲繩作為彈性元件,并考慮其被滑輪分割成三段的彈性變形。忽略鋼絲繩的質量。
4.3 等效力學模型
圖3為系統等效力學模型。將模型進行分解,分別對吊重部分、滑輪1、滑輪2以及軸處進行受力分析,各分離體受力如圖4所示。
4.4 解析模型
(1)微分方程組


圖3 等效力學模型示意圖
其中,M——制動力矩;m——吊重質量;J1——滑輪1轉動慣量;J2——滑輪2轉動慣量;J3——電機、減速器、卷筒折算到卷筒軸上的轉動慣量;K1——鋼絲繩一段跨度剛度;K2——鋼絲繩二段跨度剛度;K3——鋼絲繩三段跨度剛度;r1——滑輪1半徑;r2——滑輪2半徑;r3——卷筒半徑。
(2)求解方法
采用SIMULINK程序對上述微分方程求解,圖5為SIMULINK程序框圖。
4.5 虛擬仿真模型
4.5.1 ADAMS虛擬仿真軟件
ADAMS軟件的仿真可用于預測機械系統的性能、運動范圍、碰撞檢測、峰值載荷以及計算有限元的輸入載荷等。

圖4 各分離體受力示意圖

圖5 SIMULINK程序框圖
4.5.2 ADAMS模型與參數

圖6(a)ADAMS虛擬仿真模型

圖6(b)鋼絲繩參數表
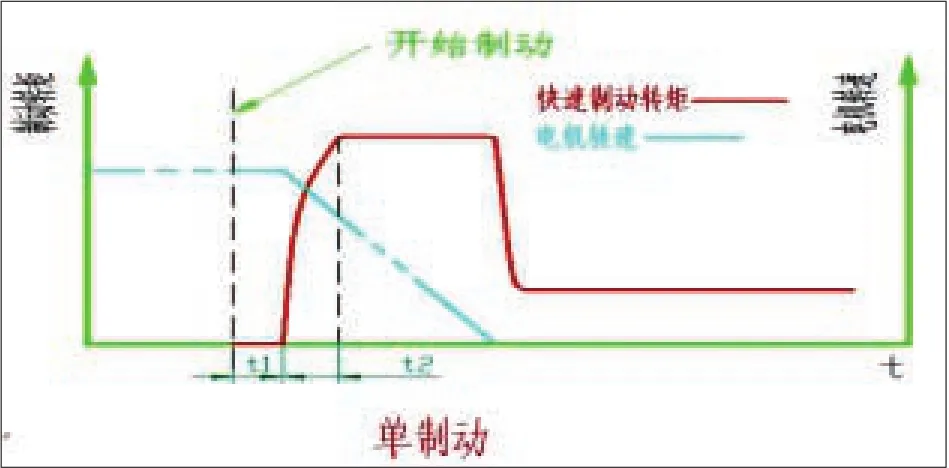
圖7(a) 電機制動器單制動力矩施加曲線
圖6(a)和圖6(b)分別是在ADAMS下建立的虛擬仿真模型和關鍵參數——鋼絲繩參數輸入對話框。預設的三個重要參數值分別為:鋼絲繩彈性模量(Young)=100 Gpa;鋼絲繩縱向剛度系數(Rkx)=1;鋼絲繩阻尼(Damping)=1E-5。預加載荷為吊重自重。
家中的女人牝雞司晨,總是喜歡爬到他的頭上來做窠拉屎,樂此不疲。人要是一倒霉,喝口涼水就塞牙,出門會碰到什么鳥屎落到頭頂上,一路上烏鴉愛不停地朝你叫。風影弄不懂紅琴臉上的表情,有時候會莫名其妙的笑,詭譎而神秘,佛陀拈花微笑,他尚且略懂一二,她臉上的笑他實在弄不明白,而有時候她又會陰霾密布,比當下那種霧霾天氣還要厲害,弄不好會突然炸出個驚雷來。多一事不如少一事,他現在總算淺層次地理解了一些師父話中的意思,山下的女人是老虎,老虎是要吃人的。
4.6 模型參數
4.6.1 基本參數
表3是SEW提供的電機減速機轉動慣量參數數值。
卷筒的轉動慣量為3.5 kg·m2,減速機減速比i=20.25,驅動單元整體折算到卷筒軸上的轉動慣量為:J3=(0.039 8+0.000 87)×20.252+3.5=20.177 2 kg·m2;
滑輪轉動慣量:J1=J2=0.031 6 kg·m2;
其余各參數列于表4,其中鋼絲繩彈性模量為暫定值,需在試驗后進行修正。
4.6.2 制動器參數
電機制動器的制動力矩施加曲線如圖7(a)和圖7(b)所示。
仿真試驗中暫取t1=50 ms,t2=50 ms,t3=150 ms,t4=200 ms,這四個時間值需要結合現場試驗測試確定。
4.7 數值計算與虛擬仿真的結果比較
為驗證兩種模型和計算方法,選取一種簡單易實現的工況分別用SIMULINK和ADAMS分別進行仿真。該工況的基本參數是:0類停止、下降、1.5 m/s初速度、雙制動、制動力矩是電機額定力矩的1.25倍、鋼絲繩長度x=10 m。仿真結果分別見圖8(a)和圖8(b)所示。

表3 SEW減速電機轉動慣量參數

表4 SEW減速電機參數

圖7(b) 電機制動器的雙制動力矩施加曲線
從圖8(a)和圖8(b)可以看出,兩種仿真結果的振蕩趨勢完全相同,最大沖擊力和振動周期的比較見表5。
由此可見,這兩種模型和計算方法是可信和一致的。
另外,從仿真結果中也可以看出,三段鋼絲繩的響應曲線是一樣的,這是因為沿途上的滑輪轉動慣量和阻尼的影響太小。因此,試驗中鋼絲繩沿途上布置的傳感器可以互為備份,其測量值應該是基本相同的。
由于解析模型中忽略掉了鋼絲繩阻尼,而ADAMS虛擬模型中可以設置鋼絲繩阻尼系數,所以兩者的振幅衰減有所不同。同時,用ADAMS調整參數更方便,重復仿真的計算速度更快。因此,后面的仿真全部采用ADAMS虛擬仿真模型。
4.8 初步仿真
初步仿真的目的在于:驗證ADAMS虛擬仿真模型的功能,能夠包含不同的影響因素。

表5 最大沖擊力和振動周期的比較結果

圖8(a) SIMULINK仿真結果

圖8(b) ADAMS仿真結果(5.56 s時得到制動信號)
為試驗提供參考數據,有利于印證試驗數據的準確性。
工況:負載5 kN,下降速度1.5 m/s,離地10 m時0類停止,雙制動器(一快一慢),每個制動器制動力矩90 N·m,纖維芯鋼絲繩直徑10 mm。
仿真結果如下,圖9(a)是三段鋼絲繩上的拉力曲線,圖9(b)是電機轉速變化曲線。
5.56 s時開始斷電。斷電后,電機失去力矩輸出,制動器尚未抱閘,出現溜車,鋼絲繩拉力下降,電機轉速上升。
大約50 ms后,制動器抱閘,系統中施加了一個快速制動力矩,電機轉速迅速下降,鋼絲繩拉力突然增大出現沖擊。
大約110 ms后,鋼絲繩拉力到達振蕩的峰值,超過了制動力矩,制動器打滑,電機轉速在下降過程中出現一段波動。然后隨著負載力矩變小,電機轉速繼續下降。
然后,鋼絲繩拉力持續振蕩,但負載力矩小于最大制動力矩,電機轉速保持零。
可以看出,在0類停止工況下,最大沖擊力19 000 N,動載系數3.8,振蕩周期0.23 s。
4.9 仿真小結
建立舞臺交流變頻調速吊掛系統的物理模型、等效力學模型、解析模型、虛擬仿真模型。

圖9(a) 三段鋼絲繩上的拉力曲線

圖9(b) 電機轉速變化曲線
初步確定了模型中關于驅動單元轉動慣量、滑輪轉動慣量、鋼絲繩彈性模量、滑輪阻尼系數、鋼絲繩遲滯阻尼系數、驅動力矩、制動力矩等參數。
分別用SIMULINK微分方程組數值求解與ADAMS虛擬仿真,驗證了這兩種模型和計算方法是可信和一致的。后面的仿真全部采用ADAMS虛擬仿真模型。
用ADAMS進行初步仿真,驗證ADAMS虛擬仿真模型的功能性,也為試驗提供參考數據。
初步的仿真結果顯示,0類停止時最大沖擊載荷系數達到3.8,振蕩周期約為0.23 ms。在設計試驗裝置以及現場測試時應予以考慮。
仿真結果顯示,三段鋼絲繩的響應曲線是一樣的,這是因為沿途上的滑輪轉動慣量和阻尼的影響太小。因此,試驗中鋼絲繩沿途上布置的傳感器可以互為備份,其測量值應該是基本相同的。
5 實物試驗驗證
5.1 測試內容
(1)0類停止時變頻器的輸出特性,實時記錄每一次試驗的電機轉速、電流等數據;
(2)0類停止時制動器的響應規律,比較快速制動、慢速制動時電氣和機械的響應時間;
(3)0類停止時鋼絲繩沿途的沖擊載荷,測試吊重、減速機、轉向滑輪處的受力;
(4)0類停止時吊重的位移和振蕩幅度,記錄吊重的位移曲線,分析吊重的振蕩幅度。
5.2 試驗數據整理與分析
5.2.1 制動器特性試驗
制動器實驗數據采集工況為1.5 m/s的速度,下降到10 m位置時0類停車,以500 kg載荷為主,190 kg為輔,分別將制動器調成單快、單慢、一快一慢、雙快、雙慢五種制動方式下的試驗數據(電流、轉速、載荷)進行對比分析。
(1)制動方式
500 kg吊重1.5 m/s下降時0類停止,不同制動方式下,鋼絲繩沖擊載荷和振蕩周期進行數據整理,如表6所示。
總結上面的數據,可以得出以下結論:
500 kg吊重1.5 m/s下降時0類停止,按沖擊由小到大排列,制動方式分別為:單慢、雙慢、單快、一快一慢、雙快,動載系數分別為2.17、2.24、3.02、3.53、3.70。
目前常規接法,1類停止時,雙制動器是一快一慢工作的;按此接法不變,0類停止時,雙制動器也是一快一慢工作的。
(2)制動時間
鋼絲繩載荷數據通道2中從斷電到第一次出現拉力谷值的時間計為t1,從斷電到第一次峰值的時間計為t2;電機轉速中從斷電到電機轉速峰值的時間計為t3,從斷電到轉速為0的時間計為t4。t1和t3反映出制動力矩開始施加后的效果,t2和t4反映出制動力矩完全施加后的效果。統計數據見表7。
總結上面的數據,可以得出以下結論:
快速制動時,電氣延遲時間短,制動力矩施加時間短;慢速制動時,電氣延遲時間長,制動力矩施加時間長。
隨負載增大,制動器打滑的時間延長,最終停止的時間也延長。
試驗所用制動器在快速制動時,制動響應時間約為30 ms~40 ms,做功時間約為100 ms左右。
試驗所用制動器在慢速制動時,制動響應時間約為130 ms~140 ms,做功時間約為250 ms左右。

表7 不同制動方式下制動時間數據

圖11(a)修正前的吊掛系統急停沖擊載荷仿真測量結果

圖11(b)修正后的吊掛系統急停沖擊載荷仿真測量結果
(注:以上數據是根據本物理模型試驗結果粗略估算的,提供給對比仿真使用。僅供參考,各個制動器會有偏差。)
5.2.2 0類停止升降/速度對比試驗
把7種上升和下降速度(0.5、0.75、1.0、1.25、1.5、1.75、2.0)下0類停止得到的數據進行對比分析可見,隨著初始速度的提高,沖擊載荷越來越大,振蕩周期越來越長;同等條件下的0類停止,下降過程中比上升過程中產生的動載系數大,振蕩周期長。具體見表8。繪制成曲線如圖10所示。
5.2.3 0類停止高度對比試驗(停止高度是指懸掛物離地面高度)
通過對停止高度5 m、10 m、15 m時0類停止的1.5 m/s速度下降試驗數據(電流、轉速、載荷)的對比分析,停止位置越高,鋼絲繩長度越短,其整體剛度越大,對應的鋼絲繩最大拉力應越大。匯總見表9。

表8 不同上升和下降速度下的參數值

表9 不同停止高度、不同長度鋼絲繩的參數對比

圖10 不同上升和下降速度下的參數曲線
6 試驗后仿真修正
6.1 參數修正
ADAMS虛擬模型能夠較好地對吊掛系統的急停沖擊載荷進行仿真測量,但由于模型中部分參數取值不夠準確,會導致仿真結果與試驗結果不能夠完全吻合。
為此,以吊掛系統為對象,進行實體驗證試驗,結合試驗結果對模型參數進行修正,完善理論分析結果。
修正的目標是確保仿真和實體試驗的最大沖擊力和震蕩周期相吻合。在此基礎上,修正阻尼系數使衰減大致相當。見圖11(a)和圖11(b)。
對比各種試驗工況進行仿真,不斷修正鋼絲繩的參數,使仿真結果與試驗結果趨于吻合。最終確定鋼絲繩彈性模量:55.5 Gpa;鋼絲繩縱向剛度系數:1.02;鋼絲繩阻尼系數:2e-4。與原初始值差別較大的原因,可能是鋼絲繩沒有充分進行預應力拉伸,也可能是繩芯不同的影響。

表10 修正后的鋼絲繩彈性模量和制動器四個延時時間參數值

圖12(a) 鋼絲繩上的拉力曲線

圖12(b) 電機轉速變化曲線

圖12(c) 吊點位移振蕩曲線
修正后的鋼絲繩彈性模量和制動器四個延時時間參數值列于表10。
6.2 試驗與仿真對比
工況:負載5 kN,下降速度1.5 m/s,離地10 m時0類停止,雙制動器(一快一慢),每個制動器制動力矩90 N·m,纖維芯鋼絲繩直徑10 mm。
仿真與試驗的結果對比如圖12(a)、圖12(b)和圖12(c),從上至下三個圖依次為鋼絲繩上的拉力曲線、電機轉速變化曲線、吊點位移振蕩曲線。
從圖12(a)、圖12(b)和圖12(c)中可以看出,試驗與仿真結果基本吻合。
5.557 s時開始斷電。斷電后,電機失去力矩輸出,制動器尚未抱閘,出現溜車,鋼絲繩拉力下降,電機轉速上升。
大約35 ms后,第一個制動器抱閘,系統中施加了一個快速制動力矩,電機轉速迅速下降,鋼絲繩拉力突然增大出現沖擊。
過大約85 ms后,電機轉速降為零。
再過大約70 ms后,鋼絲繩拉力到達振蕩的峰值,但負載力矩小于最大制動力矩,鋼絲繩拉力持續振蕩并衰減,電機轉速保持零。此時,第二個制動器抱閘,系統中又施加了一個慢速制動力矩,慢速制動對動態響應已無影響,只起到靜態的安全作用。
可以看出,在0類停止工況下,最大沖擊力17 900 N,動載系數3.58,振蕩周期約0.43 s。
與試驗前初步仿真結果比較,在電機轉速迅速下降階段,現結果中沒有出現轉速波動現象。分析原因主要有:制動器力矩大于標稱力矩值,仿真參數取110 N·m;初步仿真時,制動器的響應延遲時間和力矩施加時間取值都偏大;初步仿真時,鋼絲繩的剛度取值偏大,振蕩周期較小。也是由于同樣的原因,比較初步仿真結果而言,現結果中的動載系數較小,振蕩周期較大。
6.3 關于速度因素的仿真分析
ADAMS虛擬仿真模型得到試驗驗證后,可以將模型推廣應用。很有現實意義的一個問題就是:不同設計速度的卷揚機,它們的最大沖擊載荷會有多大?
下面通過虛擬模型仿真,總結出一組0類停止時最大沖擊載荷關于速度因素的規律性數據。
(1)不同速度的仿真
吊重5 kN不變,升降速度變化時,吊掛系統的驅動組件需設計不同的電機、減速機、制動器、卷筒,分別見表11所示。
(2)不同速度的仿真分析
圖13(a)、(b)、(c)、(d)、(e)、(f)分別是1 m/s~6 m/s的吊掛系統速度與動載系數的仿真圖。
將圖13(a)、(b)、(c)、(d)、(e)、(f)6組曲線合并到一起對比如圖13(g)。
從設計速度為1.0、2.0、3.0、4.0、5.0、6.0 m/s的吊掛系統的最大沖擊載荷對比中,可以得出以下結論:

圖13(a) 1 m/s時吊掛系統速度與動載系數的仿真圖

圖13(b) 2 m/s時吊掛系統速度與動載系數的仿真圖

圖13(c) 3 m/s時吊掛系統速度與動載系數的仿真圖

圖13(d) 4 m/s時吊掛系統速度與動載系數的仿真圖

圖13(e) 5 m/s時吊掛系統速度與動載系數的仿真圖

圖13(f) 6 m/s時吊掛系統速度與動載系數的仿真圖
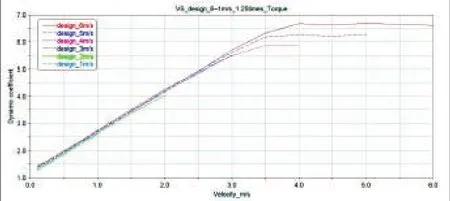
圖13(g) 1m/s~6 m/s時吊掛系統速度與動載系數的仿真圖

表11
其他條件不變的情況下,設計速度越快的系統,沖擊載荷越大。
對于設計速度超過3.0 m/s的系統,當超過一定速度時,最大沖擊載荷不再增加。這是因為,當制動盤摩擦力矩不足以克服鋼絲繩沖擊力引起的負載力矩時,制動器開始打滑。這個速度可命名為拐點速度。
當小于拐點速度時,沖擊力和速度呈線性關系增長。
上述結果匯總如表12所示。
6.4 結論
(1)以舞臺交流變頻調速吊掛系統為對象,進行實體驗證試驗,結合試驗結果對模型參數進行修正。

表12 不同設計速度下吊掛系統的動載系數和拐點速度
(2)通過試驗與仿真的對比和分析,兩者結果基本吻合,證明了虛擬仿真模型的準確性。
(3)就試驗設備在規定的實驗條件下得出的0類停止最大沖擊載荷系數,以供同類設備設計參考。
(4)按現行標準和方法進行設計的此類設備,建議速度不要過大(如超過3 m/s),否則在0類停止時會產生制動器打滑。
[1] GB 5226.1-2008 機械電氣安全 機械電氣設備 第1部分:通用技術條件[S]. 北京:中國標準出版社,2002.
[2] WH/T 28—2007 舞臺機械臺上設備安全. 中國演藝設備技術協會演出場館設備專業委員會. 北京:中國標準出版社,2009.
[3] GB 16754-2008 機械安全 急停 設計原則[S]. 北京:中國標準出版社,2002.
[4] GB 6067.1-2010 起重機械安全規程[S]. 北京:中國標準出版社,2002.
[5] GB/T 16855.1-2008 機械安全 控制系統有關安全部件 第1部分:設計通則[S]. 北京:中國標準出版社,2002.
[6] 段慧文,鄭輝,魏發孔等. 舞臺機械工程與舞臺機械設計[M]. 北京:中國戲劇出版社,2013.
(編輯 薛云霞)
Experimental Investigation of the 0 Category Stop Impact Load about Stage AC Variable Speed Rigging Equipment
CHEN De-run1, FANG Jian1, WEI Xing1, GONG Kui-cheng1, HU Ren-rong1, WANG Yuan1, DUAN Hui-wen2, LI Li3
(1. Wanda Cultural Tourism Planning & Research Institute, Beijing 310000, China; 2. Owners Committee of the National Grand Theatre, Beijing 100031, China; 3. The General Armament Department of Engineering Design and Research Institute, Beijing 100028, China)
In this paper, dynamics simulations and physical test validations were done aiming at stage AC variable speed rigging equipment on the condition of 0 category emergency stop. Additionally, the variation of the impact load was analized to arrive at the impact loads data of these stage rigging equipments as a design reference.
stage; rigging equipment; simulation; 0 category emergency stop; impact load
10.3969/j.issn.1674-8239.2015.07.009
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
