基于雙控制器切換的模糊PID勵磁控制的仿真研究
2015-07-08 07:16:46宗超凡
電氣傳動自動化 2015年1期
宗超凡
(貴州大學電氣工程學院,貴州貴陽550000)
基于雙控制器切換的模糊PID勵磁控制的仿真研究
宗超凡
(貴州大學電氣工程學院,貴州貴陽550000)
摘要:針對電力系統的不斷發展需求,傳統PID控制的發電機勵磁控制器存在動態和靜態性能的不足,提出了模糊PID控制技術在勵磁系統中的應用。經過比較發現,采用傳統PID控制和模糊PID控制兩者相互結合的雙控制切換控制勵磁系統更具優勢。通過Matlab仿真,結果證明了雙控制器切換控制勵磁系統具有良好的控制性能。
關鍵詞:傳統PID;模糊PID;雙控制器切換控制;勵磁控制器;Matlab仿真
1 概述
同步發電機的勵磁控制器,是同步發電機的重要組成部分,也是電力系統的重要組成部分。勵磁控制器的控制效果直接反應到機端電壓,從而影響電力系統的電壓穩定。因此,研究同步發電機的勵磁控制器的控制效果具有重要意義。
2 系統數學模型
同步發電機的數學模型具有多種模型,根據研究對象的不同,采取適當的數學模型,以突出研究對象的特點。忽略同步發電機內部動態特性,只對勵磁系統的動態特性及控制策略進行研究,可以把同步發電機的勵磁系統簡化為一個一階的單輸入單輸出系統(SISO)。如圖1所示為同步發電機勵磁系統圖。
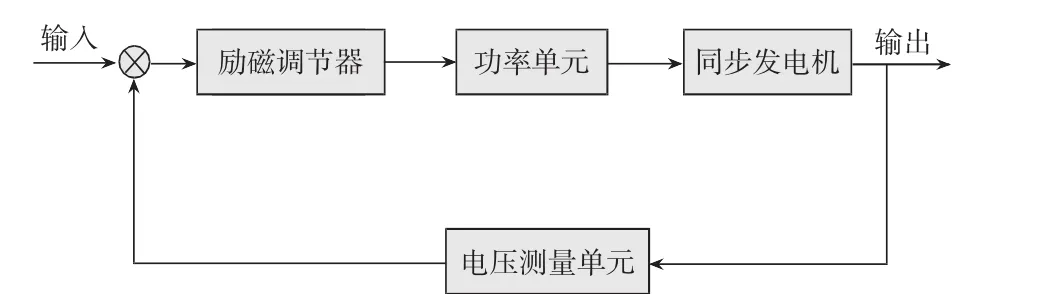
圖1 同步發電機勵磁系統圖
2.1同步發電機的傳遞函數
同步發電機在運行時,三繞組在結構上完全對稱,忽略勵磁繞組的磁飽和線性和氣隙的磁路的不良影響。因此,可以認為發電機的機端電壓與勵磁電壓成一個正相關的關系,可以將同步發電機簡化為一階慣性環節,從而突出勵磁動態特性和控制策略的研究。同步發電機的一階慣性環節為:
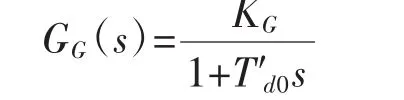
式中:KG為發電機的放大倍數,即發電機機端電壓和勵磁電壓的比值;,為定子繞組開路時勵磁繞組的時間常數。
2.2功率單元的傳遞函數
功率單元是由一組晶閘管電路構成的調壓電路,交流電源通過整流電路時會產生換向電抗,換向電抗可阻止電流瞬時變化,因此,在觸發控制信號和晶閘管輸出之間存在滯后現象,功率單元的傳遞函數是一階慣性環節:
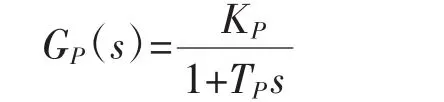
式中:Kp為輸出功率的放大倍數;TP為功率單元的時間常數。
2.3電壓測量單元的傳遞函數
電壓測量單元是將發電機機端電壓測量后反饋,與給定值進行比較,發電機機端電壓值到數字控制器的輸入,其中的整流濾波電路會產生一個滯后效應。因此,電壓測量單元的傳遞函數為:
式中:KM為電壓測量元件和發電機機端電壓的比例系數;TM為測量回路的時間常數。
3 模糊PID勵磁控制器設計
3.1模糊PID勵磁控制器原理
模糊PID是將傳統PID和智能控制中的模糊控制理論的優點相結合的一種更好的控制方式。其結構圖如圖2所示。
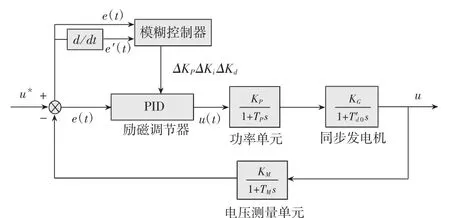
圖2 模糊PID組成結構圖
模糊控制器中有兩個輸入變量,一個是電壓偏差e,另一個是電壓偏差對時間的導數ec。選用這兩個變量,e是為了表明機端電壓和給定值的偏差;ec是為了表明目前電壓偏差的變化率,這給模糊控制更加鮮明的條件判斷,也更加符合模糊邏輯的思維。模糊控制器是由模糊化環節、知識庫、推理決策和解模糊化環節構成。
模糊控制器經過解模糊化過程,向外輸出變量dKp、dKi、dKd的參數給PID控制器,經PID控制器內部原有PID參數和dKp、dKi、dKd參數疊加后送給功率單元,功率單元經過PID參數給同步發電機提供相應的勵磁電壓。

3.2模糊PID控制邏輯
PID的參數Kp、Ki和Kd對系統的影響:Kp參數加快系統的動態響應速度;Ki參數消除系統的穩態誤差;Kd參數預測誤差變化趨勢,提前修正。
(1)當(E<0,EC<0)時,這時勵磁系統剛剛建立磁場,系統的動態響應要快,因此需要較大的Kp參數;當快接近給定值時,為減少超調,應減小積分作用,減小Ki參數。
(2)當(E>0, EC<0)時,系統輸出值已超過給定值,向偏差增大的方向變化,在此時,控制作用應該盡力減小超調,應減小Kp參數,應減小積分作用,減小Ki參數。
(3)當(E>0, EC>0)時,系統出現大超調時,應保持Kd為較小值,使系統盡快穩定。誤差開始減少,系統在控制作用下已呈現向給定值靠近的趨勢,因此控制作用應逐漸減少,以免系統出現回調。
(4)而在系統進入穩定狀態時,恢復調整初始時的PID參數。
3.3建立各個變量的論域以及隸屬度函數
輸入變量e的論域為[-1,1],ec論域為[-0.5,0.5],輸出變量kp、ki、kd的論域為[-6,6]。各個輸入輸出變量的隸屬度函數如圖3-5所示,本文隸屬度函數采用三角形模式。在Matlab命令窗口中輸入fuzzy,調出模糊控制編輯器,在其內形成各個變量的隸屬度函數和控制規則。
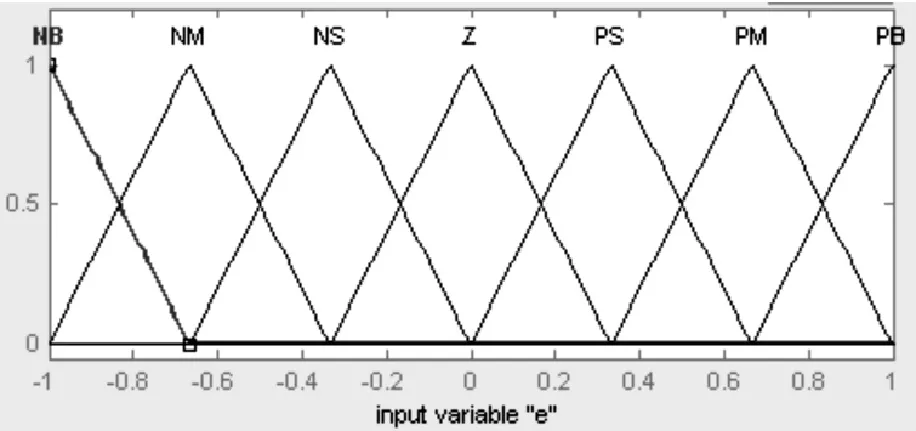
圖3 輸入變量e的隸屬度函數圖
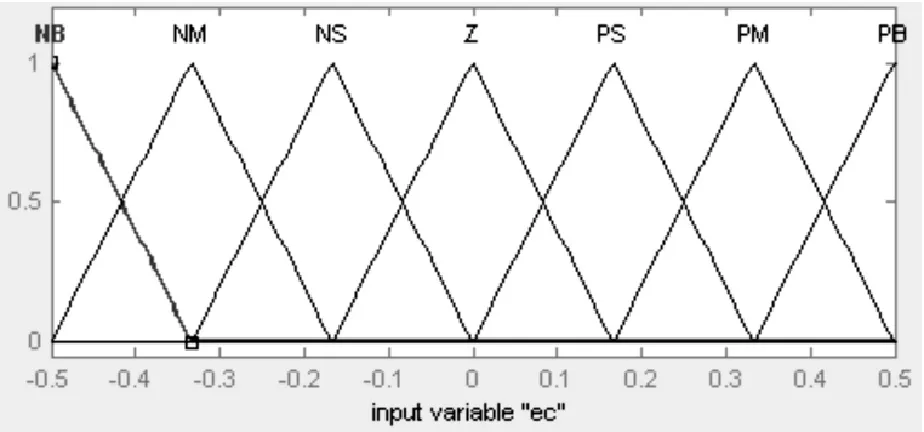
圖4 輸入變量ec的隸屬度函數圖
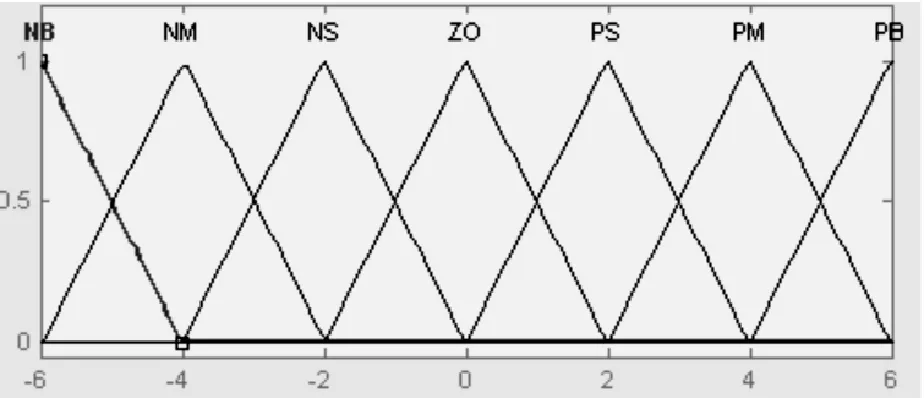
圖5 輸出變量kp、ki、kd的隸屬度函數圖
3.4建立模糊規則表
根據模糊PID控制邏輯建立模糊控制規則如表1所示。
將模糊控制規則在Matlab的fuzzy editor中用ifthen語句編寫,選取解模糊方法采用重心法(centroid)。如圖6所示為模糊規則編輯器。編輯好后,可以查看控制規則關系和控制變量空間關系圖,如圖7所示。
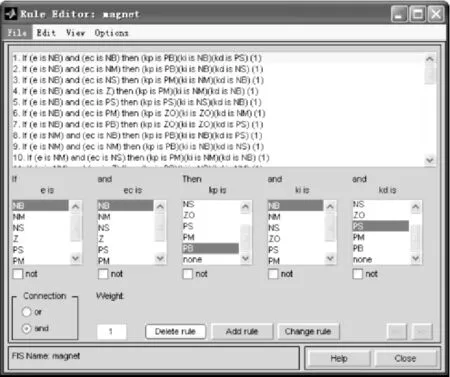
圖6 模糊規則編輯器圖
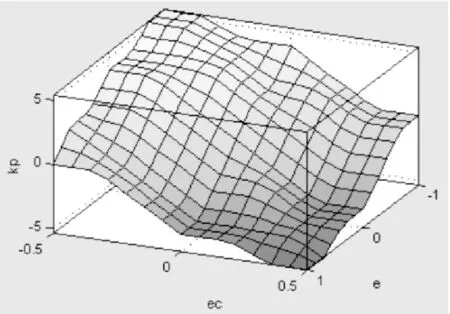
圖7 kp與e和ec的空間關系圖
4 PID、模糊PID以及切換控制的勵磁控制器Matlab仿真
4.1勵磁控制器Simulink模塊搭建
在Simulink中構建三種勵磁控制器的仿真模型,如圖8所示。
其中,0s時給定階躍信號值為1。根據試探法,所有控制器的PID參數均為Kp:100,Ki:3,Kd:15。同步發電機、功率單元和電壓測量單元的傳遞函數參數如下。
同步發電機:KG=1,T′d0=6;
功率單元:KP=1,TP=0.3;
電壓測量單元:KM=1,TM=0.02。
模糊模型多采用了一個模糊控制器模塊,將模糊算法的文件fis導出到workspace中,以便模糊控制器能夠讀取。封裝的PID的初始PID參數與傳統PID參數相同,如圖9所示。
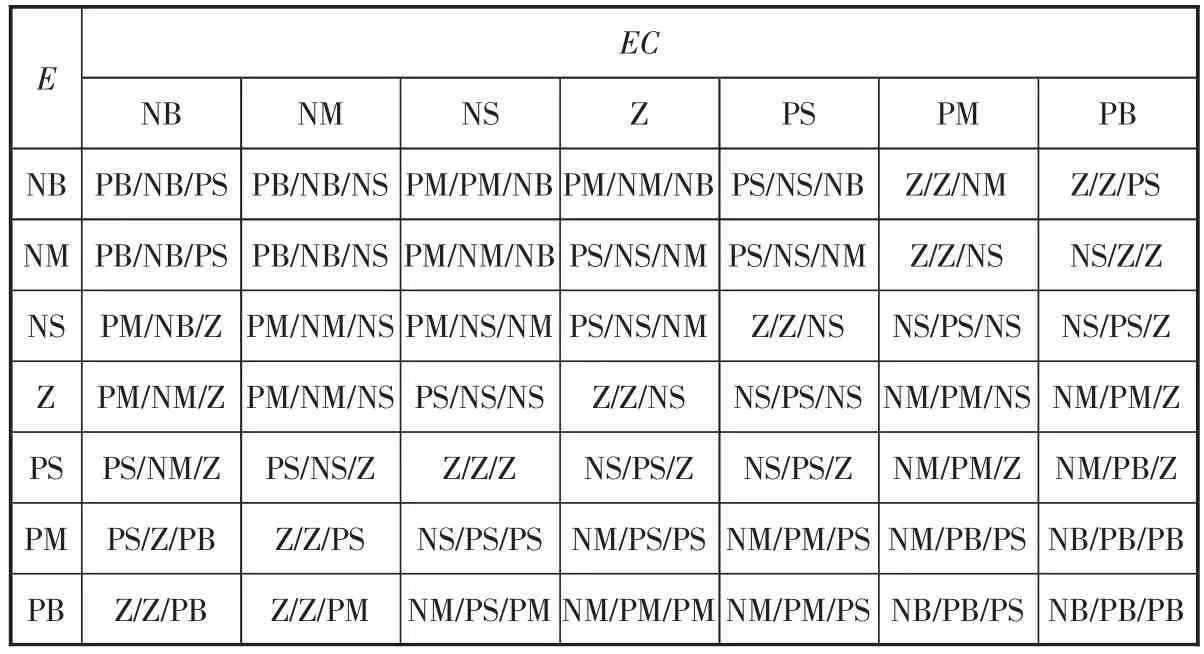
表1 模糊控制規則表
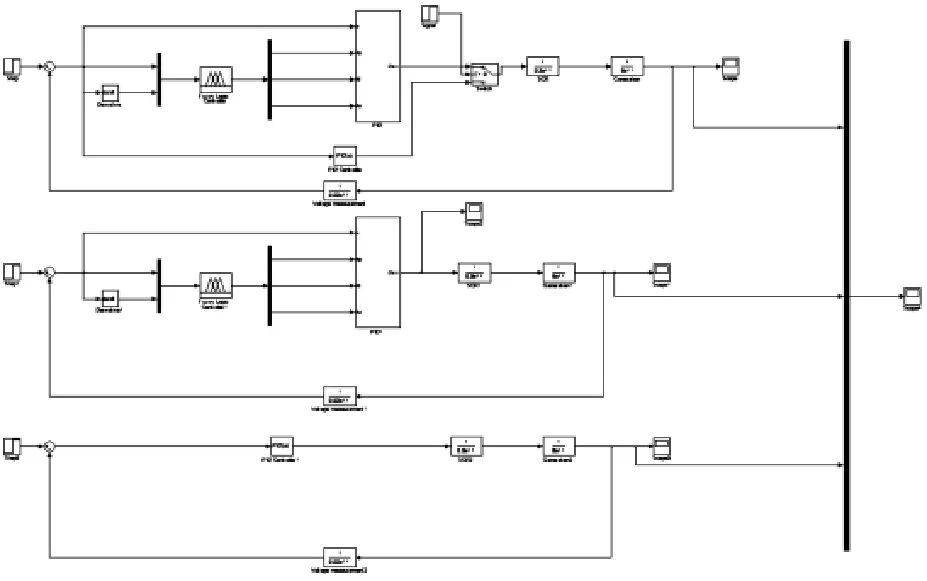
圖8 三種勵磁控制器的仿真模型
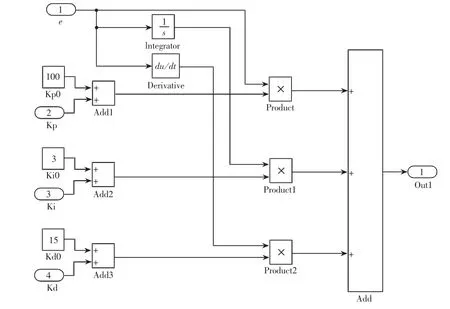
圖9 封裝PID的解封圖
雙控制器切換控制器是給開關一個控制信號,使開關在0-0.01s用傳統PID控制,在0.01s后采用模糊PID控制勵磁系統。
4.2仿真結果
將仿真參數配置設置為仿真時長為5s,仿真步長選為0de23tb。點擊仿真按鈕,如圖10所示為仿真結果比較。
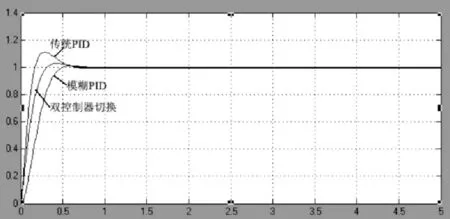
圖10 雙控制器切換控制、傳統PID和模糊PID仿真結果比較
由圖10可以看出,采用傳統PID控制的勵磁系統仿真曲線具有較大的超調量:11.1%,而采用模糊PID控制的勵磁系統的仿真曲線能較平滑地進入控制目標值,其超調量為0.8%。傳統PID具有較好的動態特性,其響應速度比模糊PID更快。傳統PID控制的上升時間為0.17s,而模糊PID的上升時間為0.52s。
雙控制器切換控制勵磁系統的控制效果介于傳統PID和模糊PID的控制效果之間。雙控制器切換控制勵磁系統相比較于模糊PID增加了動態響應速度,具有0.31s的上升時間。但是雙控制器切換控制勵磁系統比模糊PID控制的超調量大一些,具有2.8%的超調量。三者都具有較好的穩態精度。
跟蹤在0.01s處控制器切換時的曲線情況,如圖11所示。

圖11 0.01s出控制器切換的仿真圖
由圖11可以看出,兩個控制器切換是平滑切換,在0.01s出的左右導數的極限是相等的,因此認為是平滑切換。
5 結束語
本文將傳統PID與模糊PID的優勢相結合構成的雙控制器切換控制的思路,具有更好的控制性能。
參考文獻:
[1]金岫.基于模糊PID控制的同步發電機勵磁控制系統仿真研究[J].繼電器,2007,35(19):13-15.
[2]唐曉駿.同步發電機勵磁控制系統的智能控制方法研究[D].天津:天津大學電氣與自動化工程學院,2004.
[3]畢曄飛.電力系統勵磁調節器控制研究[D].河北:燕山大學電氣工程學院,2004.
[4]王德意,孫新志.同步發電機模糊PID勵磁控制器仿真研究[J].水電自動化與大壩監測,2005,29(1):17-20.
[5]劉曉巍.模糊PID勵磁控制器的仿真研究[J].電子技術,2006,1(17):160-162.
[6]楊永燈.基于遺傳算法的同步發電機自調整模糊PID勵磁控制器研究楊[J].大電機技術,2007,1(52):52-56.
[7]張立峰,金秀章,等.基于模糊自調整PID技術的勵磁控制器研究[J].華北電力大學學報,2006,33(4):20-22.
[8]劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業出版社,2006.
[9]張代峰.數字式勵磁控制系統的研究與實現[D].長沙:湖南大學,2004.
中圖分類號:TP273
文獻標識碼:A
文章編號:1005—7277(2015)01—0026—04
收稿日期:2014-06-24
Simulation and research of fuzzy-PID excitation control based on double controller switching
ZONG Chao-fan
(Electrical Engineering College,Guizhou University,Guizhou 550000,China)
Abstract:Aiming at the continuous development demands of power system,the generator excitation controller based on the traditional PID control exists some deficiencies of dynamic and static performance.The application of fuzzy PID control technology in the excitation system is presented.With the careful comparison of PID and fuzzy PID control,it is found that the double controller switch control excitation system combining with the traditional PID control and fuzzy PID control has more advantages.The Matlab simulation results show the perfect erformance of two-controller switching control of the excitation system.
Key words:traditional PID;fuzzy PID;double controller switching control;excitation controller;Matlab simulation