多足機器人規則步態實現方法研究
2015-07-07 01:16:28宋孟軍丁承君
河北工業大學學報 2015年5期
宋孟軍,丁承君
(1.天津職業技術師范大學汽車與交通學院,天津 300222;2.河北工業大學機械工程學院,天津 300130)
多足機器人規則步態實現方法研究
宋孟軍1,丁承君2
(1.天津職業技術師范大學汽車與交通學院,天津 300222;2.河北工業大學機械工程學院,天津 300130)
步態規劃在移動機器人運動學研究中具有基礎和重要的作用,本文首先對四足機器人的著地點進行設計,并分別對各腿的擺動順序進行幾何規劃,利用虛擬樣機,對四足機器人的單足軌跡進行設計,使得機體能夠維持重心穩定并向前運動;其次,本文構建了四足機器人支撐機構的運動學逆解模型,排除奇異解,基于支撐機構的數學建模與求解對四足機器人的前行運動進行了規劃;最后,實驗結果表明,規則步態規劃方法可實現四足機器人穩定可靠地運動.
機器人;步態規劃;并聯機構;運動學逆解
步態規劃在機器人運動學、動力學以及控制方法設計中均具有重要作用,可以為機器人的穩定運動和快速運動提供充分的理論依據和技術支持[1-4].
步態規劃中,由仿生學原理依據生物體結構特點設計機器人本體,并通過捕捉生物的運動步態[5-8],對機器人的運動步態進行規劃仿真,可獲得合理的步態生成方法;以機器人運動學模型為基礎,并在機器人靜態穩定前提下,通過規劃機器人的步態順序,對機器人各項運動學性能進行設計、優化,同樣可完成機器人步態規劃[9-10].
在所構建的運動學模型基礎之上,基于ZMP穩定性判定理論[11],可對機器人重要關節及重要點的運動軌跡進行規劃,并可同時對當前步態進行規劃,使得ZMP軌跡落在滿足穩定裕度的穩定區域內,此類步態規劃中,比較典型的規劃方法有:針對雙足機器人的兩步規劃法和逆兩步規劃法,基于FZMP的穩定性保持步態規劃方法[12],以及采用樣條插值函數[13]進行軌跡優化等方法.
在運動學、動力學分析基礎之上,倒立擺模型被引入到步態規劃[14]方法中,且模糊控制算法[15]、遺傳算法[16]、神經網絡[17]等控制學算法同樣被應用到步態規劃方法中;一些文獻通過解算函數關系或通過實時處理傳感數據等,實現了機器人的步態規劃與優化.另有文獻通過引入能量穩定裕度等能量優化方法,同樣對機器人的步態進行了規劃與優化[18].
但因缺少機器人本體數學模型地整體構建,目前移動機器人進行自主步態規劃尚存有一定的局限性.
本文將主要針對四足機器人規則步態規劃方法進行研究,利用虛擬樣機技術,對四足機器人單足運動軌跡進行設計,并構建一種多運動模式仿生機器人移動機構的運動學逆解模型,利用此運動學逆解模型對移動機器人的步態規劃方法進行解算,進一步完善四足機構的規則步態的生成算法,進而提高移動機器人自主步態規劃能力和環境適應能力.
1 基于幾何規劃的步態生成
多足移動機器人的步態生成方法,多為規則步態規劃,以適應適應路況較為平坦或者地形變化并不明顯且目標較為明確的任務環境.所謂規則步態,多為固定模式,如圖1,所示為多足輪腿機器人單腿邁進時的規則步態規劃過程.
如圖1所示,多足輪腿機器人要完成機身平行于地面的移動任務,單腿在邁進過程中,關節與連桿機構須協調運動,基于合理的幾何關系調整,規劃各關節的變化,最終完成機身在運動過程中始終保持與地面的平行與等距的幾何關系.
而在機器人的移動過程中,只要機器人重心的垂直投影始終落在移動機器人支撐點所構成的多變形內時則認為機器人的運動是靜態穩定的,如圖2所示Ai點為支撐點,C為重心投影.
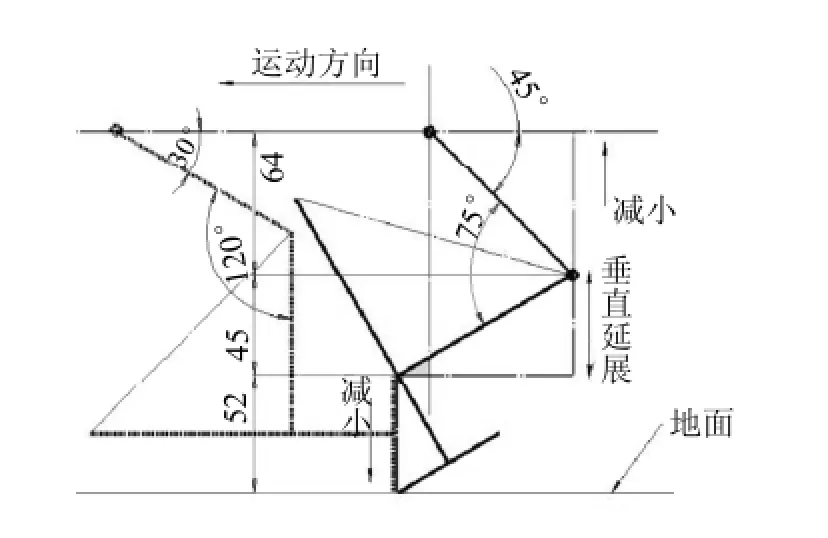
圖1 機器人單腿移動示意圖Fig.1Mobile Sketch of one leg of the robot
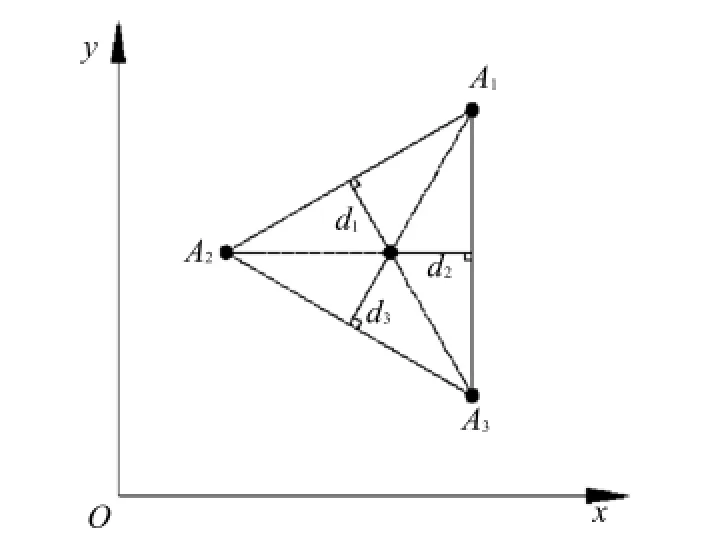
圖2 步行機器人步態穩定性的幾何描述Fig.2The walking robot's gait stability of geometrical description
通過上面的分析可以知道,多足機器人在行走時將有3條腿支撐地面(或面積足夠的支撐平面),這給機器人能夠穩定工作帶來很大便利,同時該穩定性能增強了機器人對不同地面的適應能力,為機器人進行進一步的步態規劃提供了充分的基礎.如圖3,為一種新型四足移動機器人.
基于此新型四足機器人,利用上面所提到的穩定性的判定方法,結合本例機器人四足支撐的特點,可以對機器人的不同步態進行進一步的開發,以不斷提高多足機器人的運動能力,如圖4所示,對圖3所示四足機器人的步態進行幾何規劃,用以完成四足機器人機身的間歇式前進運動.
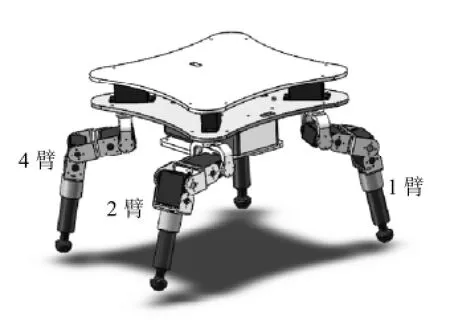
圖3 新型四足移動機器人Fig.3A new kind of quadruped robot
如圖4所示,在運動過程中,對四足機器人四足的著地點進行預設計,腿3首先處擺動狀態,其余3條腿分別處于支撐身體運動狀態,整個軀體安裝箭頭所示方向,向前運動,基于上述幾何規則步態規劃方法,分別對各腿的擺動順序進行幾何演算,使得機體相對地面始終向前運動,重心始終在移動.四條腿輪流抬、跨,相對機體也向前運動,不斷改變足落地的位置,構成新的穩定的三角形,從而保證靜態穩定向前運動.
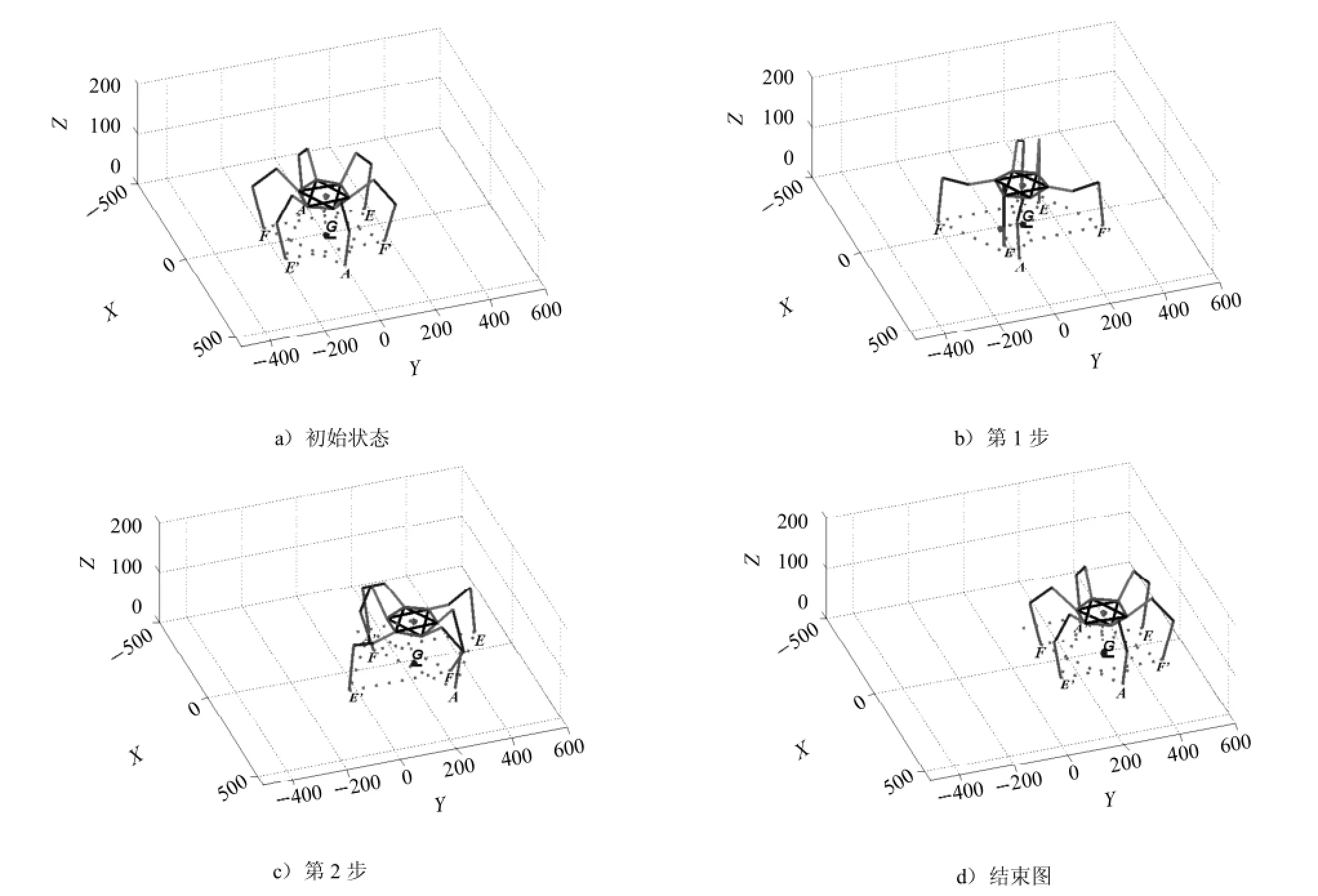
伴隨虛擬樣機技術的發展,可對虛擬多足機器人進行立體式步態規劃,如圖5所示.

圖4 四足機器人步行運動的幾何規劃Fig.4Geometric programming for quadruped robot gait planning
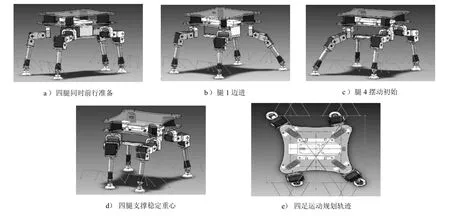
圖5 四足機器人步態運動的立體幾何規劃Fig.5Period gait planning for quadruped robot
圖5為與圖4相對應的四足機器人機身間歇式前進運動的實現過程.其中圖5不僅對四足機器人的著地點進行了預設計,同時,對四足機器人的足端運動軌跡進行規劃,對四足機器人的整體運動進行立體式預設計,因此,可預知四足機器人的重心在空間的變化規律,為提高四足機器人的穩定運提供充分的依據.四足機器人間歇前進運動起始位置各關節角度如表1所示,其中第3列以及后面的第5、7列為脈沖寬度,第4、6、8列為關節角度.
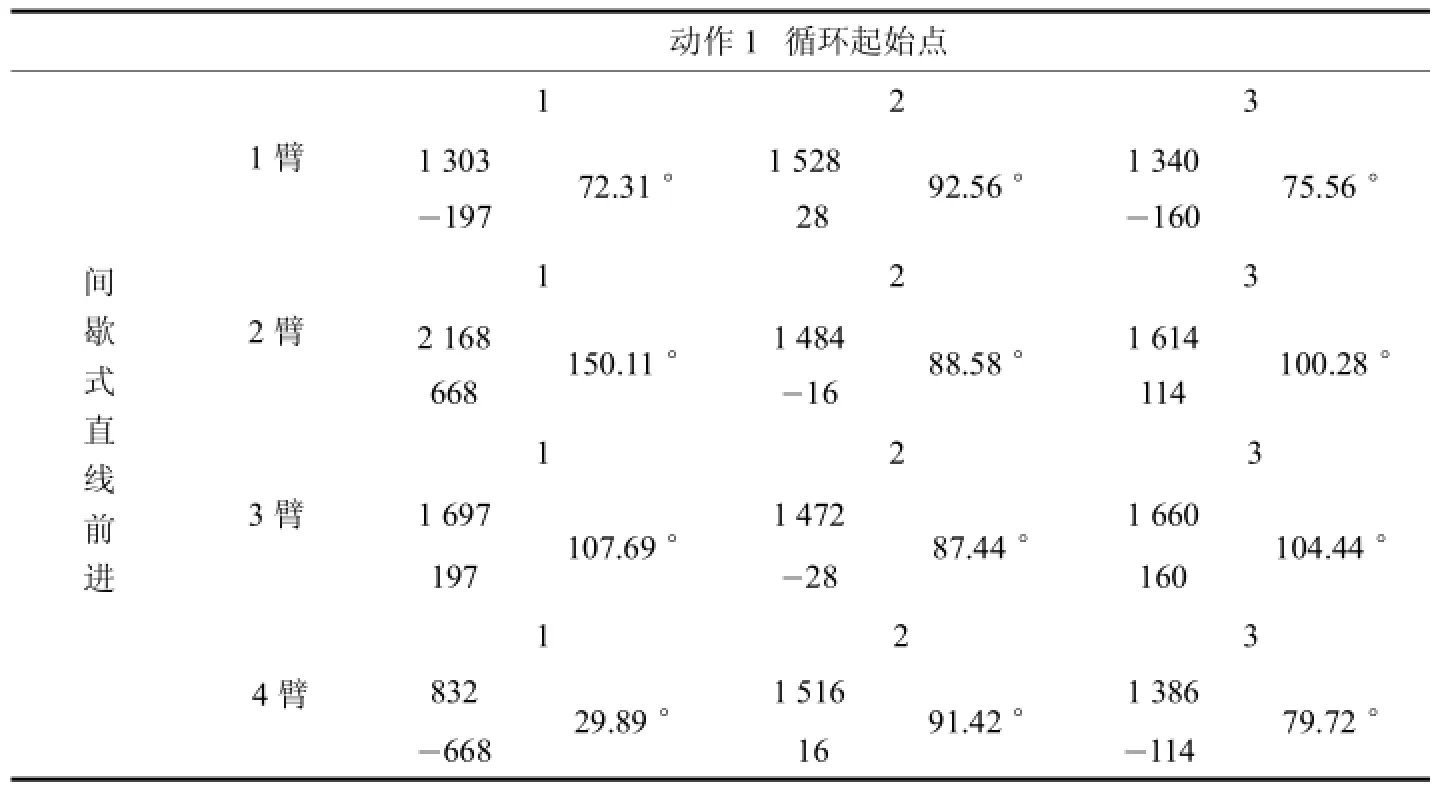
表1 循環起始點各臂姿態角度分布Tab.1Angle planning for each leg during the starting point
2 基于逆運動學模型的步態規劃
隨著各種技術的不斷發展,能夠適應非結構環境的移動機器人步態規劃方法正在成為研究人員研究的熱點.
四足機器人移動機構模型如圖6所示.如前所述,移動機構存在擺動腿和支撐腿,擺動腿向前邁進的同時,支撐腿負責支撐并向前移動,此時,所有支撐腿可以看作一個并聯機構,因此可構建該四足機器人處于支撐狀態時并聯機構的運動學模型,如圖7所示.

圖6 四足機構簡圖Fig.6Mechanism sketch of the quadruped robot

圖7 多運動模式仿生機器人移動機構運動學逆解模型Fig.7Inverse kinematic model of the Multi-sports&Bionic robot
圖7為三足著地時支撐狀態模型,同時機構運動學逆解求解模型.其中ABC桿件為結構件,不影響模型的構建.為簡化計算過程,靜平臺設定為大地,而動平臺設定為機身,坐標系(o xoyozo)內A、E、F點位置PA、PE、PF已知,上平臺坐標系(o'xo'yo'zo')原點o'點位置已知,O點為定(下)平臺坐標系原點,位于各支撐點外接圓圓心處,繞旋轉軸Z3的轉角變化量為3,繞旋轉軸Z4的轉角變化量為4,繞旋轉軸Z5的轉角變化量為5,C(xC,yC,zC)、D(xD,yD,zD)投影點C、D位于支撐點A所在平行于機身的平面內,機身面與各支撐點所構成的平面平行.
利用幾何投影的方法可對該機器人的運動學逆解進行解析求解,通過排除奇異解,可得逆解結果如式(1)~式(3).


因為三足支撐模型具有較為充分的穩定裕度,能夠實現四足機構的穩定行走,本文將以兩對稱三足機構交替運動為研究對象,對四足機器人規則步態的實現方法進行研究.
如圖8所示,AEF及A'E'F'分屬兩組三足支撐機構,且采用對稱布置,G為機器人上平臺幾何中心對支撐平面的垂直投影,可視為機器人重心的垂直投影.
運動過程中,利用運動學逆解模型與逆解算法,求解運動至下一位置,各關節所需運動角度,采用對稱協調運動的方式,控制擺動腿與支撐腿的交替動作,完推動支撐機構向前運動,將即3條腿負責支撐、3條腿負責擺動,如圖8所示.
圖8中支撐機構模型的上平臺的行走軌跡為直線,由圖可知,利用運動學逆解求解方法可實現支撐機構穩定地推動機身上平臺向前運動,完成多足機構的步態規劃.另,通過求解單腿機構的運動學正解模型,可對擺動腿的運動過程進行相應的規劃,以配合支撐機構完成抬腿、擺動、收腿等動作,以完成機器人整機直線行駛.
8直線行駛步態規劃Fig.8Straight ling walking
3 實驗驗證
采用3D打印技術制作完成四足機器人如圖9所示,利用基于幾何規劃的步態生成方法對四足機器人前向運動進行實驗.
由圖9可知,四足機器人整機結構的重心在運動過程中,時刻在變化,因受足端擺動軌跡的影響較大,但規則步態的規劃方法仍然能夠有效克服重心失衡,實現四足機器人的穩定運動.
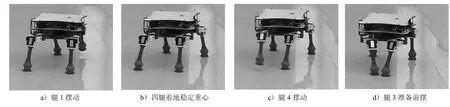
圖9 四足機器人前向運動實驗Fig.9The experiment of strait line working for quadruped robot
4 結論
本文首先利用幾何規劃方法對四足機器人的著地點進行了設計,以保證四足機構在運動過程中,重心投影始終落在支撐多邊形內,并利用虛擬樣機技術,對四足機器人的單足軌跡進行了設計,以生成能夠維持重心穩定的規則步態;其次,本文通過構建四足機器人移動機構的運動學逆解模型,并基于逆解結果對四足機器人支撐機構的規則步態生成方法進行了仿真研究;最后,四足機器人前向行走的實驗結果表明,本文所提規則步態規劃方法可以適應整機重心的不斷變化,并維持機體行走的穩定性.
[1]槐創鋒,方躍法.5連桿雙足機器人建模和控制系統仿真[J].系統仿真學報,2008,20(20):5682-5686.
[2]孟偲,王田苗,丑武勝,等.仿壁虎機器人的步態設計與路徑規劃[J].機械工程學報,2010(9):32-37.
[3]Porta J M,Celaya E.Reactive free-gait generation to follow arbitrary trajectories with a hexapod robot[J].Roboticsand Autonomous Systems,2004,47(4):187-201.
[4]Sahin Yildirim.Design of a proposed neural network control system for trajectory controlling of walking robots[J].Simulation Modelling Practice and Theory,2008,16(3):368-378.
[5]Nandi G C,Ijspeert A J,Chakraborty P,et al.Development of adaptive modular active leg(AMAL)using bipedal robotics technology[J].Robotics and Autonomous Systems,2009,57(6):603-616.
[6]Richard J Bachmann,Frank J Boriaf,Ravi Vaidyanathan,etal.A biologically inspired micro-vehicle capable of aerial and terrestrial locomotion [J].Mechanism and Machine Theory,2009,44(3):513-526.
[7]徐子力,呂恬生,徐振華,等.雙足溜冰機器人樣機研制[J].中國機械工程,2007,18(16):1921-1924.
[8]黃麟,韓寶玲,羅慶生.仿生六足機器人步態規劃策略實驗研究[J].華中科技大學學報,2007,35,12:72-75.
[9]黃博,趙建文,孫立寧.基于靜平衡的四足機器人直行與樓梯爬越步態[J].機器人,2010,32(2):226-232.
[10]ThanhtamHo,SunghacChoi,SangyoonLee.Development ofabiomimeticquadrupedrobot[J].Journal ofBionicEngineering,2007,4(4):193-199.
[11]Taesin Ha,Chong Ho Choi.An effective trajectory generation method for bipedal walking[J].Robotics and Autonomous Systems,2007,55(10):795-810.
[12]殷晨波,周慶敏,徐海涵,等.擬人機器人抗干擾行走穩定性分析[J].控制與決策,2006,21(6):619-624.
[13]彭勝軍,稅海濤,楊慶,等.雙足步行機器人轉彎步態規劃及其實現[J].信息與控制,2010,39(6):783-788.
[14]李建,陳衛東,王麗軍,等.未知不平整地面上的雙足步行穩定控制[J].電子學報,2010,38(11):2669-2674.
[15]Jong Hyeon Park.Fuzzy-logic zero-moment-point trajectory generation for reduced trunk motions of biped robots[J].Fuzzy Sets and Systems.2003,134(1):189-203.
[16]繩濤,程思微,王劍,等.欠驅動雙足機器人動態步態規劃方法研究[J].計算機工程與應用,2009,45(6):1-4.
[17]Jimmy Or.A hybrid CPG-ZMP control system for stable walking of a simulated flexible Spine humanoid robot[J].NeuralNetworks,2010,23(3):452-460.
[18]孫敏,范守文.基于能耗指標的擬人機器人步態優化與分析[J].機械設計與研究,2007,23(2):52-55.
[責任編輯 田豐夏紅梅]
Research on period gaits planning for multi-leg robot
SONG Mengjun1,DING Chengjun2
(1.School of Automotive and Tansportation,Tianjin University of Technology and Education,Tianjin 300222,China;2.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China)
Gait planning is very important for robotic kinematics.First,each touchdown point is strictly fixed during the gait planning to follow the sequence of each swing leg.Based on the virtual prototype technology,we have also designed the motiontrajectory ofthe legs fromthequadruped robotproposed in thispaper,so that the robot canwork forward steadily.In the following paragraph,the mechanism model and inverse kinematics model are constructed for the quadruped robot,and geometric method is used to solve the singular solution and inverse kinematics for the kinematic mechanism. Then,based on the work done upon,the straight forward walking is finished by using coordinated planning among the four legs of the quadruped robot.Finally,the experiment for period gait planning show that the gait generation method is feasible for straight forward walking.
robot;gait planning;parallel mechanism;inverse kinematics
TH114
A
1007-2373(2015)05-0032-06
10.14081/j.cnki.hgdxb.2015.05.007
2014-12-06
天津市重大科技專項(工程)項目(12ZCDZGX45800);天津市科技支撐計劃項目(13ZCZDGX01200);河北省自然科學基金(F2013202220);天津市應用基礎與前沿技術研究計劃項目(14JCYBJC22000)
宋孟軍(1983-),男(漢族),講師,博士.
數字出版日期:2015-10-19數字出版網址:http://www.cnki.net/kcms/detail/13.1208.T.20151019.1017.006.html
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
領導決策信息(2018年50期)2018-02-22 06:17:16
Coco薇(2017年11期)2018-01-03 20:59:57
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:21
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
