六足仿生機器人腿部動力學分析與控制
2015-07-07 01:16:28于常娟張明路金玉陽
河北工業大學學報 2015年5期
關鍵詞:方法
于常娟,張明路,金玉陽
(1.河北工業大學機械工程學院,天津 300130;2.廊坊師范學院數學與信息科學學院,河北廊坊 065000)
六足仿生機器人腿部動力學分析與控制
于常娟1,2,張明路1,金玉陽1
(1.河北工業大學機械工程學院,天津 300130;2.廊坊師范學院數學與信息科學學院,河北廊坊 065000)
為了實現六足仿生機器人的多種運動模式,提高不同路況環境的適應能力,提出了一種帶有變形關節的新型腿部結構.采用拉格朗日方法建立了用于控制機器人腿部的動力學模型,設計了計算力矩+RBF神經網絡復合控制器,其中計算力矩是已建模的部分,神經網絡補償動力學模型中未建模部分、結構參數的測量誤差以及外部擾動.采用MATLAB對腿部的軌跡跟蹤控制進行仿真,結果表明了該控制器跟蹤精度更高,具有優良控制性能.
仿生機器人;新型腿部結構;動力學;計算力矩控制;神經網絡
0 引言
近年來,自然界中的動物運動方式極大地激發了人們研究仿生機器人的靈感,各式各樣的仿生機器人也應運而生.例如六足仿壁虎機器人[1],八足仿生蟹機器人[2].BigDog四足機器人[3].其中四足機器人具有運動速度快、靈活性高的優勢.與四足機器人相比六足機器人具有穩定性更高、運動速度適中、承載和攀爬能力更強的優勢,可應用于星際探測、復雜地形的減災救援、海底作業、野外偵查及軍事等方面.德國宇航中心研制了小型六足機器人DLR-Crawler,能夠置于大型探測設備內,在大型探測器無法到達的地域內執行采樣和探測等任務.美國國家航空航天局、斯坦福大學與加州理工大學噴氣推進實驗室共同研制了全地形六足地外探測器ATHLETE,其對復雜地形的適應能力較強.在國內,對六足機器人的研究起步較晚,沈陽自動化研究所研制了CR-02 6000米自治水下機器人,哈爾濱工業大學研制了小型六足機器人HITCR-Ⅰ.因此對六足仿生機器人系統的研究具有重要的理論意義和實際應用價值.本文針對全地形路況下的六足機器人進行分析研究,提出了腿部帶有變形關節的新型六足機器人,并進行了腿部動力學分析和控制器設計.
機構動力學分析的主要方法包括:牛頓-歐拉法、拉格朗日法、凱恩法等.其中牛頓-歐拉法需要分析構件間的內力,非完整約束可以融入到受力分析方程中,求解驅動力矩時還需要把內力再消去,分析和計算過程繁瑣,適用于結構簡單的機構動力學分析.楊玉維等[4]通過牛頓-歐拉方法和拉格朗日方法相結合對該輪式懸架柔性單桿移動機械人進行了動力學分析與建模.凱恩方法不必分析構件間的內力,便于對具有非完整約束的系統和具有多余約束的系統進行動力學分析,計算過程比較簡單,但是該方法不夠直觀.張國偉等[5]利用凱恩方法對并聯機器人進行動力學建模.ChifuYang等[6]利用凱恩方法對空間并聯機器人進行動力學建模.拉格朗日方法分析過程簡單,解得形式封閉,方法易于理解.Chen C Y等[7]利用第一類拉格朗日方法對輪式移動機器人進行動力學分析建模,李欣源等[8]利用拉格朗日方法對柔性雙輪平衡機器人進行動力學建模.本文利用拉格朗日方法建立了帶有變形關節的腿部動力學模型.并結合計算力矩與RBF神經網絡補償控制器進行復合控制.
1 動力學建模
普通六足仿生機器人腿部具有3個關節,即根關節、髖關節和膝關節,當足端的位置確定后,腿部的姿態也隨之確定,不能進行調整,所以腿的靈活性較差.本文提出新型六足仿生機器人具有6條結構相同的腿,又為每條腿多設計了1個變形關節,即具有4個轉動關節,當變形關節的角度發生變化時可以改變腿部行走的姿態,從而可以模擬昆蟲和哺乳類等動物行走的姿態,具有多模式運動的能力,進一步增強了機器人運動的靈活性并提高了越障能力.
如圖1為六足仿生機器人機構簡圖.6條腿均勻對稱分布于機身兩側.每條腿具有4個關節.圖2為可變形腿的示意圖.
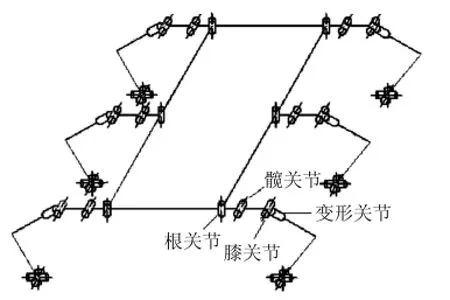
圖1 六足仿生機器人機構簡圖Fig.1The mechanism prototype of hexapod biomimetic robot
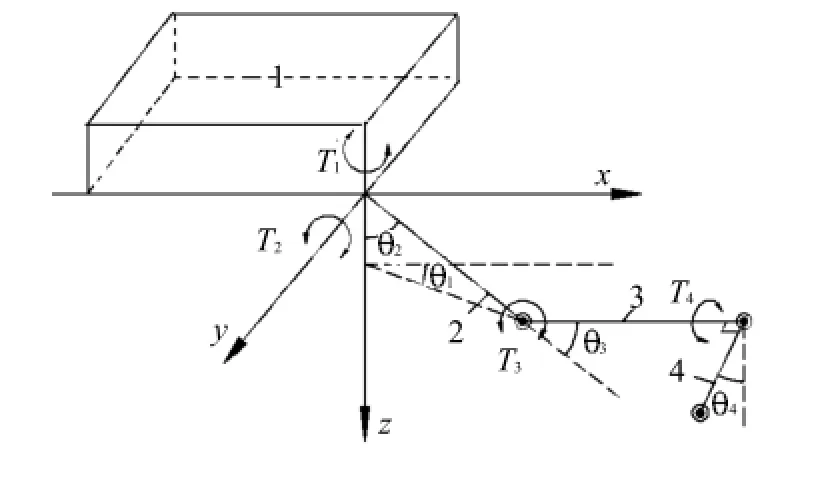
圖2 可變形腿示意圖Fig.2Diagram of leg has a deformable joint
在這里假設機身是靜止或勻速直線運動,忽略了機身對擺動腿的作用力,且與地面沒有接觸,使擺動腿的動力學分析簡化.

為便于進行控制器設計,把分離成慣性力矩項,向心力矩哥氏力矩項和重力矩項,得逆動力學模型式(4)

式中:為轉動關節處的電機驅動力矩,是(1×4)向量;M為4×4階慣性矩陣,滿足對稱正定有界性質;C,為向心力和哥氏力矩項,是4×4矩陣;M2C,為斜對稱矩陣;G為重力項是(1×4)有界矩陣.這里由于篇幅限制不列出各轉動關節處電機驅動力矩的具體值.
2 控制器設計
常用的基本控制方法有計算力矩控制、滑模控制、迭代學習控制和魯棒控制等,基本控制方法結合神經網絡控制和模糊控制等智能方法,可以發揮各控制方法的優勢,彌補其不足[9-11].本文采用計算力矩控制與神經網絡補償控制復合控制六足機器人的腿部.計算力矩控制器輸出已知模型部分的動力,RBF神經網絡逼近模型的不確定部分和外界擾動.
當模型精確已知時,計算力矩控制器


3 仿真
變形關節的作用是改變六足機器人腿部的姿態,即模仿不同昆蟲,哺乳動物等運動,當運動模式確定后,變形關節的角度即固定不變,是一個恒定值.
利用MATLAB實現機器人足端跟蹤橢圓軌跡仿真,采用5次B樣條插值進行關節空間軌跡規劃得到轉動角位移、角速度和角加速度都連續的關節期望軌跡.
可變形腿構件的幾何參數:各桿長度為l1=2cm,l2=20cm,l3=15cm,l4=10cm.質量分別為m1=0.1kg,m1=2 kg,m2=1.5 kg,m3=1 kg.各桿質心距轉動軸的距離p1=2 cm,p2=10 cm,p3=7.5 cm,p4=5 cm.
在可達空間中足端軌跡定義為橢圓的上半部分,每步跨度是10 cm,足端抬起的高度是5cm,從足端軌跡中選取若干間隔點,根據逆運動學逆解得到關節空間的對應角位移,利用5次樣條插值法得到關節空間的期望軌跡.關節的初始位置設為[0.6,0.5,0.6,0.5],初始速度和初始加速度都設為[0,0,0,0].
網絡結構采用輸入層8個神經元,輸入值為關節轉角誤差及誤差的微分x=e,eT.隱含層5個神經元,即5個高斯基函數,輸出層4個神經元,輸出值即模型不確定部分的逼近值.
在考慮建模誤差和外界擾動情況下計算力矩法單獨控制與計算力矩控制+神經網絡補償復合控制該可變形腿的各個關節軌跡跟蹤比較如圖3,計算力矩控制+神經網絡補償復合控制經過8 s與期望軌跡基本重合,跟蹤的誤差極小,跟蹤性能優良.可見雖然較計算力矩控制法+神經網絡補償復合控制趨近軌跡所用的時間較長但軌跡跟蹤精度較高,考慮關節只有初始位置不在期望軌跡上,關節軌跡趨近需要一定時間,但是當實際軌跡趨近到期望軌跡后,以后的邁進過程中,關節會一直保持高精度軌跡跟蹤.綜合考慮,計算力矩控制+神經網絡補償控制優于計算力矩控制法,能滿足實際控制的需要.
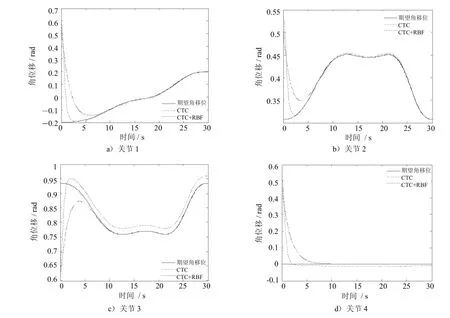
圖3 計算力矩控制與計算力矩控制+神經網絡補償控制軌跡跟蹤效果比較Fig.3Trajectory tracking of computed torque control vs computed torque plus RBF neural network control
4 結論
機構方面提出了一種新型帶有變形關節的六足仿生機器人腿部.動力學方面,基于拉格朗日方法建立了腿部的動力學模型.控制方面,采用計算力矩控制器+RBF神經網絡補償控制器.利用MATLAB對腿部進行軌跡跟蹤控制仿真,結果表明該控制器較傳統控制器的軌跡跟蹤誤差更小,可用于該六足機器人腿部的軌跡跟蹤控制.
致謝
本文得到了廊坊師范學院科學研究項目(LSLB201501)的資助.
[1]DonghoonSon,DongsuJeon,WooChulNam,etal.Gait planningbasedonkinematicsforaquadrupedgeckomodelwithredundancy[J].Robotics and Autonomous Systems,2010,58(5):648-656.
[2]ChenXi,WangLi-quan,YeXiu-fen,et al.Prototypedevelopmentandgaitplanningofbiologicallyinspiredmulti-leggedcrablikerobot[J].Mechatronics,2013,23(4):429-444.
[3]丁良宏,王潤孝,馮華山,等.淺析BigDog四足機器人[J].中國機械工程,2012,23(5):504-514.
[4]楊玉維,張明路.6自由度輪式懸架柔性單桿移動機械手動力學研究與仿真[J].機械設計,2009,26(10):43-46.
[5]張國偉,宋偉剛.并聯機器人動力學問題的Kane方法[J].系統仿真學報,2004,16(7):1386-1391.
[6]Yang Chifu,Zheng Shutao,Lan Xinjie,et al.Adaptive robust control for spatial hydraulic parallel industrial robot[J].Procedia Engineering,2011,15(1):331-335.
[7]Chen C Y,Li TH S,Yeh Y C,et al.Design and implementation of an adaptive sliding-mode dynamic controller for wheeled mobile robots[J].Mechatronics,2009,19(2):156-166.
[8]李欣源,阮曉鋼,任紅格.柔性雙輪平衡機器人的動力學建模與分析[J].機器人,2010,32(1):138-144.
[9]Zhu Zhenqi,Li Jinsong,Gan Zhongxue,et al.Kinematic and dynamic modelling for real-time control of Tau parallel robot[J].Mechanism and Machine Theory,2005,40(9):1051-1067.
[10]Torres S,Me'ndez J A,Acosta L,et al.On improving the performance in robust controllers for robot manipulators with parametric disturbances [J].Control Engineering Practice,2007,15(5):557-566.
[11]陳維,王耀南,許海霞.一類不確定系統的神經網絡L2--增益魯棒控制[J].控制理論與應用,2010,27(6):745-752.
[12]Zuo Yi,Wang Yaonan,Liu Xinzhi,et al.Neural network robust tracking control strategy for robot manipulators[J].Applied Mathematical Modelling,2010,34(7):1823-1838.
[13]劉金琨.機器人控制系統的設計與MATLAB仿真[M].北京:清華大學出版社,2008:41-45.
[責任編輯 田豐夏紅梅]
Dynamics analysis and control of the legs of hexapod biomimetic robot
YU Changjuan1,2,ZHANG Mingli1,JIN Yuyang1
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.College of Mathematics and Information,Langfang Teachers University,Hebei Langfang 065000,China)
A new leg structure with a deformable join was presented,so that the hexapod biomimetic robot can achieve multiple motion modes and improve adaptability to environment.By langrange method the dynamics model of the robot legs was obtained.Based on the computed torque and the RBF neural network,the hybrid controller was designed.The computed torque was made of the modeled part.The RBF neural network was used to compensate the unmodeled part, the measure error of the structure parameters and the external disturbance.Simulation results by MATLAB show that the tracking precision of the controller is higher and its control performance is superior.
biomimetic robot;new leg structure;dynamics;computed torque control;neural network
TP273
A
1007-2373(2015)05-0028-05
10.14081/j.cnki.hgdxb.2015.05.006
2014-11-03
國家自然科學基金(61473113);國家863計劃項目(2011AA040201)
于常娟(1976-),女(漢族),講師,博士生.
數字出版日期:2015-10-19數字出版網址:http://www.cnki.net/kcms/detail/13.1208.T.20151019.1023.008.html
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
