預防交叉口死鎖的信號配時方法
2015-07-03 09:20:59陳睿楊顧練李海濤姜沈陽
中國科技縱橫 2015年12期
陳睿楊 顧練 李海濤 姜沈陽
【摘 要】由于交通瓶頸處的排隊車輛上溯到上游交叉口,導致的上游交叉口車流不能正常運行。造成這種現象的主要原因是信號配時不合理造成的前車預估不足,后車盲目跟隨導致交叉口擁堵。目前,信號配時方法通常假定車輛能夠正常通過交叉口實現信號配時,但交通過飽和狀態下車輛往往難以正常通過交叉口,形成“死鎖”現象。為避免交叉口的“死鎖”,本文定義排隊強度對信號配時控制策略進行優化,避免信號交叉口出現死鎖現象。
【關鍵詞】死鎖 感應控制 排隊強度
1引言
交叉口死鎖現象也叫做交通多米諾現象,一般是由于交通瓶頸處的排隊車輛上溯到上游交叉口,導致的上游交叉口車流不能正常運行。造成這種現象的主要原因是信號配時不合理造成的前車預估不足,后車盲目跟隨導致交叉口擁堵。國內相關研究有:王殿海等(2002)以交通波理論為基礎,研究了交叉口排隊消散過程對上下游交叉口的影響,等等。縱觀國內外研究成果,在交叉口死鎖的信號配時方法方面研究較少,本文定義排隊長度運用感應信號控制方法對這種現象提出新的解決方案。
2短連線交叉口信號控制的建立
2.1信號控制策略
在交叉口流量較小的時候,原有的信號配時方案完全能夠滿足交通需求,且能夠做到延誤最小。但在出現死鎖現象的交叉口,這種信號控制方案不能滿足交通需求,會出現大規模擁堵現象。由此,采用排隊強度以解決這種問題。
定義排隊強度K為交叉口出口方向的排隊長度xd與可容納的總車輛數L之比。 K=Xd/L ①
如圖2-1所示:
圖2-1排隊車輛數與可容納總車輛數的關系
②
式中:H:臨界排隊強度
Sp:本相位飽和流率
Gp:相位最大綠燈時間
M:調節系數(M≥1)
M=1時下游可容納最大排隊車輛數正好等于每周期可釋放的最大車輛數,此時若排隊車輛數正好為下游可容納的最大排隊車輛數則表示相位的交通需求已經達到交通供給水平,仍有超過交通需求的可能。此時應該判斷本相位已經處于飽和狀態。所以M必須不小于1,而m的具體取值可以根據實際的交通情況來確定。
圖2-2單點信號交叉口排隊長度預測方法
開始時交叉口實行原有的單點控制配時,并且對交叉口得擁擠情況進行實時監測,當檢測到K≥H(臨界排隊強度),記為交叉口下游出現擁堵現象,而當擁堵持續周期N≥3時,作為約束條件的觸發條件,開始進行死鎖預防控制方案。
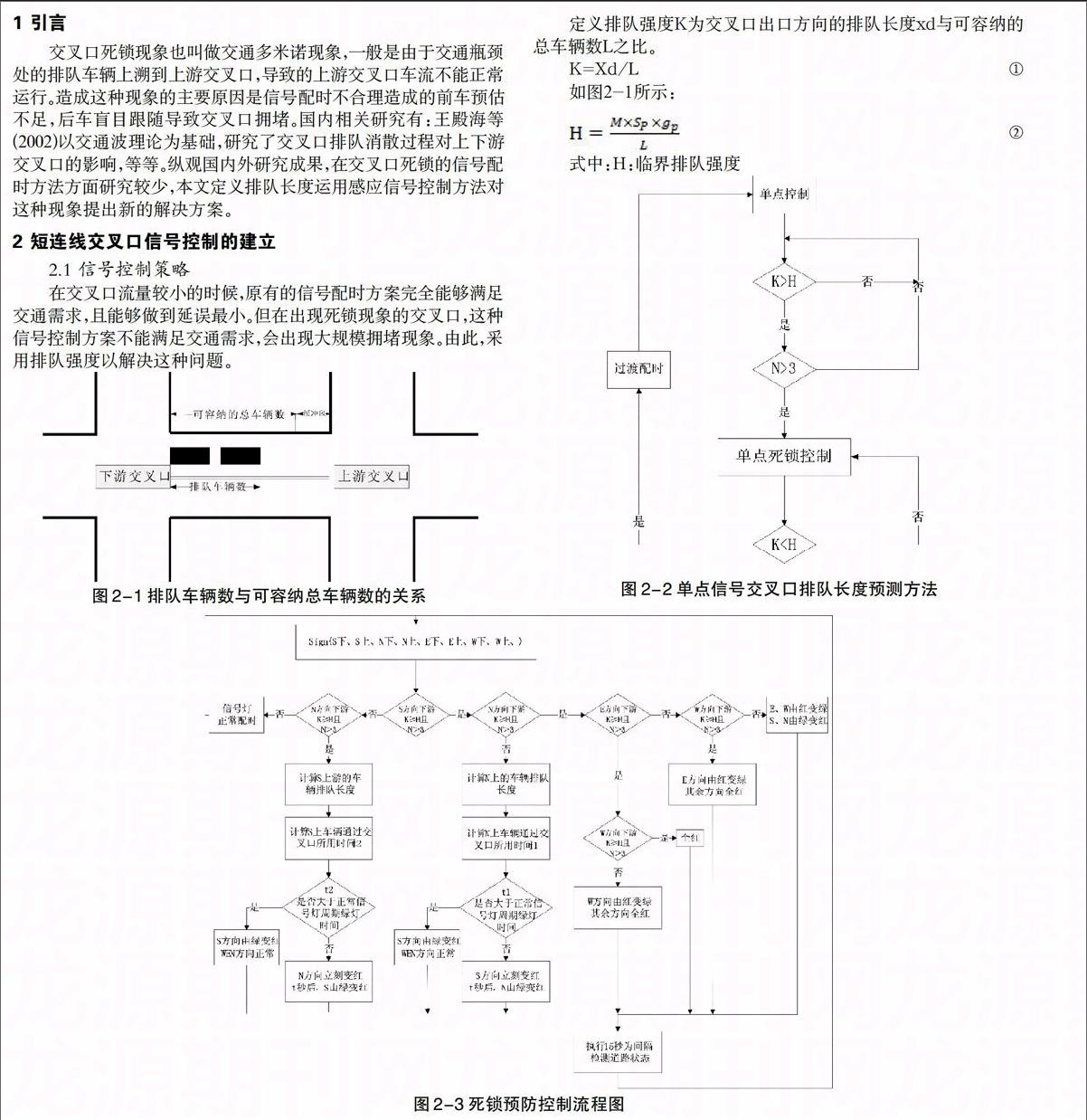
當K 如圖2-3為死鎖預防控制方案: 圖2-3死鎖預防控制流程圖 圖2-3基于信號交叉口死鎖的信號控制方式實際上是一種感應控制方法,此方法適用于兩交叉口距離較近而且車流量較大的時段,尤其是在車流量大,綠燈時間相對較短的情況下較為明顯,本方案通過信號交叉口的檢測器與視頻檢測進行15秒鐘間隔的道路檢測,隨時對信號交叉口各個方向下游擁堵時間進行檢測。 2.2關鍵參數取值依據 預防死鎖控制方案的關鍵參數取值依據如下: (1)車輛最小綠燈時間Gmin 。車輛最小綠燈時間Gmin應滿足排隊車輛消散的要求,因此使用各個相位關鍵進口道的車隊消散時間 Ti 來確定車輛最小綠燈時間計算方法如下: 式中: Ti ——相位i關鍵進口道的車隊疏散時間(s); qimax——相位i關鍵進口道的最大排隊長度(輛), Si ——相位i關鍵進口道的飽和流率(輛/s); qi ——相位i關鍵進口道的到達率(輛/s); ri ——相位i的紅燈時間(s); (2)車隊通過交叉口所用時間t。車隊通過交叉口需要的時間可以看為車隊尾車通過交叉口的時間。即為綠燈啟亮時刻啟動波傳至隊尾的時間與尾車加速通過交叉口的時間之和。 啟動波:根據格林希爾治線性模型推導的啟動波模型 所以啟動波的波速為 啟動過程中,u2數值上較小,與uf相比可忽略不計。 假設車隊中有N輛車,以啟動波波速為w傳遞到第N輛車的時間為: 式中:l:車隊中車輛的平均長度 由基礎運動學知識可知:假設車輛啟動后加速度為a,加速經過 時間后速度到達 ,車輛保持勻速 通過交叉口,所行駛的距離為 ① 其中L1為交叉口內部長度。同時通過上圖可以求得車輛行駛過得距離為: ② 由①式與②式可求出 ,即為尾車加速通過交叉口的時間,則車隊通過交叉口所用時間: 2.3模型適用性分析 本文的交叉口信號配時模型是以延誤最小為目標,以每周期釋放車輛數不超過下游可容納的排隊長度為約束條件,該模型適用于鄰近交叉口間距相對較短并且交叉口流量較大的信號交叉口。但不適用與過小或者過大的交叉口,如果應用此模型可能會造成各方向延誤增加的情況,因此該模型不適用這種狀況。