非完整移動機器人的模型預測控制技術的研究
2015-07-02 17:55:56陳明月
科技資訊 2015年4期
陳明月
摘 要:該文主要基于動力學模型的基礎上,初步建立目標函數,添加終端狀態懲罰到值函數,并且添加一個終端狀態約束到滾動時域控制器上來保證局部線性的穩定性,并完成對非完整移動機器人的軌跡跟蹤。在此基礎上,研究保證預測狀態穩定的誤差輸入、設計終端狀態控制器。研究表明,添加終端懲罰的目標函數能確保規劃出的軌跡不僅能有效的跟蹤參考軌跡,并且使輸入的信號能夠滿足限定的終端狀態時域約束。仿真結果表明,此方法能有效跟蹤參考軌跡。
關鍵詞:非完整移動機器人 模型預測控制(MPC) 動力學模型 軌跡跟蹤
中圖分類號:TP242 文獻標識碼:A 文章編號:1672-3791(2015)02(a)-0098-02
隨著工業技術的發展,移動機器人在各個領域中的應用越來越廣泛,關于它的研究也越來越深入。移動機器人可以代替工作人員進入各種危險環境,發現人類無法存在的環境領域中新事物等工作。近幾十年來,圍繞移動機器人的軌跡跟蹤問題涌現出了大量的研究成果。文獻[1]中針對輪式移動機器人的非完整約束建立動力學模型,研究了全動態誤差系統準無限時域非線性模型預測控制策略。文獻[2]通過分析和建立全向移動機器人運動學模型,研究了足球機器人的軌跡跟蹤問題。文獻[3]根據廣義預測控制的概念提出了運動預測控制方法。
該文的基本思路是在運動學方程的基礎上,主要考慮動力學方面的影響,建立動力學模型,對機器人的軌跡跟蹤問題進行研究,并運用模型預測控制的方法尋找最優控制函數,得出最優輸入。最后,利用MATLAB軟件進行仿真,驗證預測控制方法的可行性。
1 輪式移動機器人建模
該文主要采用的是具有一個前輪驅動和兩個后輪的非完整移動機器人作為被控對象。
2 終端狀態控制器以及控制函數的設計
如下是控制算法內容的描述:
(1)當前誤差狀態是反饋的。在此反饋狀態基礎上,開環最優控制函數可以通過求解優化問題(3.4)來獲得。
3 仿真
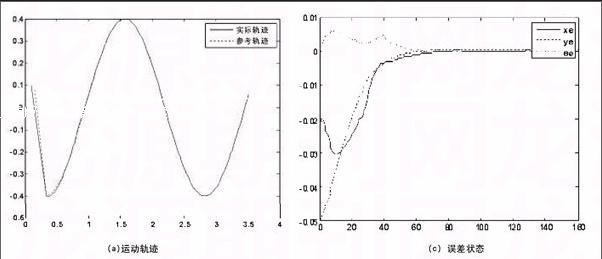
該文是選擇Matlab軟件在個人計算機上進行仿真測試的,主要跟蹤了正弦軌跡,優化步驟的最大數字選為80,優化步驟中最大數字越大,則跟蹤性能越好,然而也就需要越多的計算時間。
由仿真結果可以看出,雖然在開始跟蹤的時候速度和狀態有誤差,但是最終機器人的軌跡將收斂到參考曲線,控制信號收斂到參考控制信號,以及誤差狀態收斂于零。
4 結語
該文提出了一種穩定的終端狀態控制器,用來跟蹤控制非完整移動機器人。其能夠很好地解決局部穩定性的問題,實現機器人對于軌跡的跟蹤。但是該方法也存在一定的缺陷,即計算量是使用該控制器實時系統中的一個重要問題。如何提高計算效率仍在進一步研究中。提出的終端狀態控制器需要一個初始可行的解決方案。目前,正在使用試驗和誤差的方法。初始解決方案的可行性分析是人們未來的工作。
參考文獻
[1] 韓光信,陳虹,馬苗苗,等.約束非完整移動機器人軌跡跟蹤的非線性預測控制[J].吉林大學學報(工學版),2009(1):177-181.
[2] 曾志文,盧惠民,張輝,等.基于模型預測控制的移動機器人軌跡跟蹤[J].控制工程,2011(S1):80-85.
[3] 谷東兵,胡豁生,Michael Brady.移動機器人的運動預測控制[J].儀器儀表學報,2000(2):155-158.
[4] 馬海濤.非完整輪式移動機器人的運動控制[D]合肥:中國科學技術大學,2009.
[5] 郭旭,熊蓉,胡協和.全方位移動機器人的運動預測控制[J].電機與控制學報,2007(1):79-82,87.
