智能交通中車輛跟蹤算法的研究
2015-06-29 05:46:51鄧塏鏞唐佳林
科技資訊 2015年11期
關(guān)鍵詞:效率
鄧塏鏞 唐佳林

摘 要:智能交通系統(tǒng)中車輛跟蹤模塊的準(zhǔn)確性非常重要,其跟蹤結(jié)果直接影響車流量、違章事件、交通事故的統(tǒng)計與分析結(jié)果。基于交通車輛,該文對目標(biāo)特征跟蹤法、動態(tài)輪廓跟蹤法、區(qū)域中心點(diǎn)匹配跟蹤法分別進(jìn)行分析選取,并對效果最好的方法進(jìn)行了實(shí)現(xiàn)和效果對比,從而為日后的車輛跟蹤提供一種切實(shí)可行的算法以提高跟蹤的效率。
關(guān)鍵詞:車輛目標(biāo) 跟蹤算法 智能交通 效率
中圖分類號:TP39 文獻(xiàn)標(biāo)識碼:A 文章編號:1672-3791(2015)04(b)-0218-01
隨著城市現(xiàn)代化進(jìn)程的加快,汽車數(shù)量日益增多,為了能時刻監(jiān)察路面擁擠、違章行為、交通事故等狀況,智能交通系統(tǒng)被普及使用。其中車輛跟蹤是智能交通中的至關(guān)重要的模塊,車輛跟蹤算法的選取與實(shí)現(xiàn)過程都會直接影響車輛跟蹤的效率。
1 車輛目標(biāo)跟蹤算法的比較與選取
運(yùn)動目標(biāo)跟蹤就是在視頻的每一幅圖像中確定出運(yùn)動目標(biāo)的位置,并把不同幀中同一目標(biāo)對應(yīng)起來。常用的跟蹤算法有目標(biāo)特征法、動態(tài)輪廓法、區(qū)域中心點(diǎn)匹配法。
目標(biāo)特征法是在相鄰的兩幀圖像中利用線、點(diǎn)、面積等個體特征來跟蹤運(yùn)動目標(biāo)。一般以運(yùn)動目標(biāo)的質(zhì)心距離和幾何面積作為目標(biāo)匹配模板,然后把后續(xù)圖像中的目標(biāo)特征與模板特征進(jìn)行比較,把差別小的確定為目標(biāo),從而達(dá)到跟蹤的目的[1]。此方法算法簡單,不用區(qū)分目標(biāo)的幾何形狀,但當(dāng)目標(biāo)被遮擋時則無法識別,導(dǎo)致跟蹤失敗。
動態(tài)輪廓法是先在人工選定的位置上勾勒出目標(biāo)的輪廓曲線,當(dāng)目標(biāo)運(yùn)動時,輪廓線會有能量變化,當(dāng)能量向極小值變化時,目標(biāo)輪廓則逐漸收斂,根據(jù)反復(fù)迭代能量函數(shù),確定跟蹤目標(biāo)輪廓[2]。此方法計算復(fù)雜度低,但目標(biāo)輪廓的精度受初始位置的影響,初始化難度大。而該研究的對象是車輛,攝像頭所拍攝到的車輛二維輪廓也會隨時間推移而改變,嚴(yán)重影響本方法對目標(biāo)的鎖定。
區(qū)域中心點(diǎn)匹配法是把對當(dāng)前幀圖像通過運(yùn)動物體分割檢測出運(yùn)動區(qū)域,并以其中心點(diǎn)建立跟蹤區(qū)域模板,然后將當(dāng)前幀的運(yùn)動物體與跟蹤區(qū)域模板進(jìn)行匹配,尋找出與模板區(qū)相似性最大點(diǎn)的位置,并以此點(diǎn)為中心定義新的搜索區(qū)窗口,最后利用當(dāng)前幀已跟蹤上的區(qū)域的參數(shù)預(yù)測下一幀中運(yùn)動區(qū)域的位置。此方法能動態(tài)地維護(hù)一幅背景圖像,通過前景圖像和背景圖像之間的差值來確定運(yùn)動區(qū)域,適合對大范圍、復(fù)雜場景下進(jìn)行目標(biāo)跟蹤,具有較強(qiáng)的實(shí)時性。
根據(jù)以上算法的對比,該研究確定使用區(qū)域中心點(diǎn)匹配跟蹤法進(jìn)行車輛目標(biāo)的跟蹤。
2 區(qū)域中心點(diǎn)匹配跟蹤算法的實(shí)現(xiàn)
該系統(tǒng)的算法程序采用 Visual C ++ 與OpenCV圖像開發(fā)包進(jìn)行實(shí)現(xiàn),以下是區(qū)域中心點(diǎn)匹配跟蹤算法的實(shí)現(xiàn)過程。
2.1 設(shè)置檢測帶,對車輛連通域初始化
車輛目標(biāo)在系統(tǒng)前期檢測中所得到的目標(biāo)區(qū)域可設(shè)置為一個連通域,連通域在二維圖中呈矩形,系統(tǒng)可確定連通域的近似長、寬和中心點(diǎn)坐標(biāo)位置。設(shè)置檢測帶是對剛進(jìn)入視頻區(qū)域的車輛進(jìn)行初始記錄。該監(jiān)控視頻背景為左下行、右上行的多車道馬路,因此檢測帶應(yīng)分別設(shè)置在圖像的左上部和右下部,檢測帶長度應(yīng)覆蓋同向車道的總寬,檢測帶寬度則根據(jù)連通域中心點(diǎn)大小和車輛速度而定[3]。連續(xù)運(yùn)動的車輛目標(biāo)每經(jīng)過檢測帶,檢測帶會記錄車輛連通域中心點(diǎn)的坐標(biāo)位置、時間,給予編號和累加數(shù)目。如果速度較慢的車輛在相鄰兩幀圖像中,中心點(diǎn)都停留在檢測帶里,系統(tǒng)就會判別相鄰兩次的中心點(diǎn)坐標(biāo)位置差是否如果小于一定像素數(shù),如果是則認(rèn)為是同一輛車,否則為兩輛車。
2.2 預(yù)測目標(biāo)車輛下一幀的位置區(qū)域
車輛被初始定位后,系統(tǒng)就開始預(yù)測它在下一幀圖像中的運(yùn)動區(qū)域。考慮交通事件中車輛隨時會向各個方向運(yùn)動,預(yù)測區(qū)域應(yīng)該是從當(dāng)前車輛連通域向前后左右延伸適當(dāng)?shù)木嚯x,以一個外接矩形作為車輛下一幀的運(yùn)動預(yù)測范圍。
2.3 在預(yù)測區(qū)域內(nèi)尋找和匹配車輛連通域
當(dāng)進(jìn)入下一幀圖像時,系統(tǒng)要在預(yù)測區(qū)域內(nèi)尋找新的車輛連通域并與上一幀目標(biāo)車輛的連通域模版進(jìn)行匹配。匹配時要求相鄰兩幀圖像車輛連通域的中心點(diǎn)橫、縱坐標(biāo)之差、連通域的高、寬之差(四個量)分別小于各自的預(yù)設(shè)閾值[4]。只有全部滿足條件才能成功匹配,系統(tǒng)則完成相鄰兩幀圖像的目標(biāo)跟蹤,并更新連通域;如果不滿足任一條件,即跟蹤失敗,系統(tǒng)要清空其跟蹤的信息。
2.4 實(shí)現(xiàn)效果
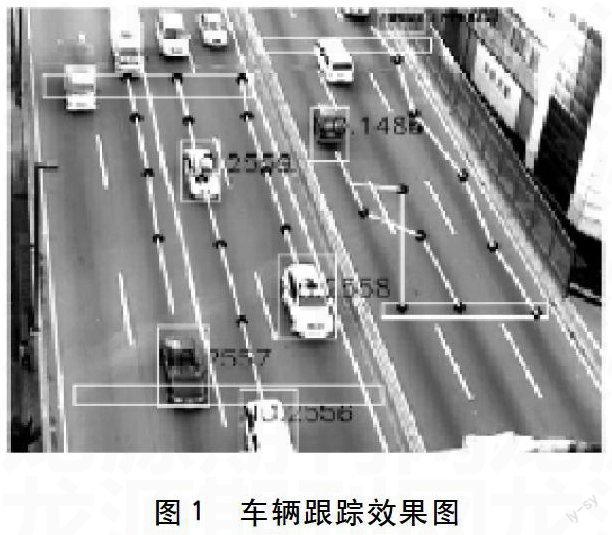
系統(tǒng)對一段為時7分鐘的公路監(jiān)控視頻(320×240)進(jìn)行車輛跟蹤,處理速度達(dá)到實(shí)時25幀/秒。圖1為區(qū)域中心點(diǎn)匹配法的跟蹤效果圖,黃色框?yàn)闄z測帶,綠色框?yàn)檐囕v連通域標(biāo)記框,并有編號。該研究把另外兩種方法也逐個切換使用,比較效果,如表1所示。針對車輛目標(biāo)的跟蹤,動態(tài)輪廓法的跟蹤準(zhǔn)確率最低,目標(biāo)特征法有所改善,區(qū)域中心點(diǎn)匹配法的跟蹤效率最高。
3 結(jié)語
該研究利用區(qū)域中心點(diǎn)匹配跟蹤法,能在局部預(yù)測區(qū)域內(nèi)完成車輛目標(biāo)的跟蹤,避免出現(xiàn)整個圖像中所有車輛的匹配混淆問題,極大提高了車輛跟蹤的準(zhǔn)確率,縮小跟蹤時間,進(jìn)一步提高智能交通系統(tǒng)對車輛目標(biāo)的跟蹤精度。
參考文獻(xiàn)
[1] 楊彪.一種用于多攝像頭無重疊視域環(huán)境下的車輛跟蹤系統(tǒng)[J].現(xiàn)代交通技術(shù),2014(3):54-58.
[2] 劉永濤,喬潔.基于openCV的車輛自動跟蹤系統(tǒng)的設(shè)計與實(shí)現(xiàn)[J].汽車實(shí)用技術(shù),2013(2):23-26.
[3] 桑卡(美).圖像處理.分析與機(jī)器視覺[M].北京:清華大學(xué)出版社,2011:99-100.
[4] 王鑫,徐立中.圖像目標(biāo)跟蹤技術(shù)[M].北京:人民郵電出版社,2012:82-85.
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經(jīng)濟(jì)(2017年6期)2017-07-12 09:27:16
中國衛(wèi)生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(yè)(2015年7期)2015-02-28 19:02:38
電子設(shè)計工程(2015年12期)2015-02-27 12:06:10
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32