MEMS壁面剪應力傳感器陣列水下標定實驗研究
2015-06-23 09:11:52田于逵孫海浪
實驗流體力學 2015年2期
關鍵詞:測量
田于逵, 謝 華, 黃 歡, 孫海浪, 張 楠, 沈 雪
(中國船舶科學研究中心 水動力學國防科技重點實驗室, 江蘇 無錫 214082)
MEMS壁面剪應力傳感器陣列水下標定實驗研究
田于逵*, 謝 華, 黃 歡, 孫海浪, 張 楠, 沈 雪
(中國船舶科學研究中心 水動力學國防科技重點實驗室, 江蘇 無錫 214082)
壁面剪應力的精確測量對于研究水下物體邊界層流動、尋求有效的減阻增效措施至關重要。MEMS壁面剪應力傳感器的標定首先是最基本的靜態標定,其決定了其測量的精度和數據的可信度。本文在分析已有標定方法的基礎上研發1種新型水下壁面剪應力給定裝置,并采用數值方法計算分析不同流速下的壁面剪應力給定條件,進而設計壁面剪應力傳感器靜態標定方案,開展了一種MEMS熱膜式壁面剪應力傳感器陣列的水下靜態標定實驗,獲得了各傳感單元的標定系數。
壁面剪應力;MEMS;傳感器陣列;水下;標定
0 引 言
一直以來,通過有效的技術措施實現減阻增效、提高水下航行體綜合航行性能是水動力研究的重要內容。減小水下航行體繞流湍流邊界層引起的摩擦阻力更是開展水下航行體減阻研究的重點和關鍵。物體近壁湍流的復雜性使得直接研究湍流內部細觀結構面臨諸多困難。在此情況下,通過測量分析來研究近壁湍流直接作用的表面應力時空變化特性,不啻為解決問題有效途徑。物體近壁湍流流動現象具有時間和位置的不確定性,流動結構尺度小,生命周期短,且對外界擾動極為敏感。這些特性對測試和辨識技術提出了很高的要求,傳統傳感器一般難以滿足。MEMS(微機電系統)技術的發展為上述問題,包括表面應力大面積、長時間和高精度測量問題的解決提供了可能。
壁面剪應力傳感器的種類較多,常見的有浮動元件式傳感器[1]、熱線/熱膜式傳感器[2]和底層隔板[3]等。其中,熱膜式壁面剪應力傳感器由于具有對流場干擾小、空間分辨率和帶寬高、可靠性好等優點,應用較為廣泛。
MEMS壁面剪應力傳感器的標定,首先是最基本的靜態標定,決定了其測量的精度和數據的可信度,是應用該傳感器開展實驗測量的基礎和前提。目前,壁面剪應力傳感器的標定和應用研究大多集中在空氣介質上,水下標定技術研究較少。本文在調研常用壁面剪應力傳感器標定技術的基礎上,基于充分發展的槽道流原理研發了1種新型水下壁面剪應力給定裝置,結合數值模擬分析設計優化了壁面剪應力傳感器靜態標定方案,并完成了1種MEMS熱膜式壁面剪應力傳感器陣列的水下靜態標定實驗,標定結果可為該剪應力傳感器陣列的水下測試應用提供基礎。
1 標定方法
進行剪應力傳感器最基本的靜態標定,即要建立剪應力傳感器輸出信號E與給定的定常壁面剪應力τw之間的關系:
(1)
反之,藉此關系,在應用于試驗測量時,可由傳感器輸出信號E得到其感知的當地壁面剪應力τw。顯然,測量是標定的逆過程,標定是剪應力傳感器應用于試驗測量的基本前提。而為得到準確可靠的靜態標定結果(系數),作為標定輸入的壁面剪應力τw的給定至為關鍵。
根據牛頓粘性定律,剪應力τw與流體流速U存在如下關系:
(2)
其中:流速U是y方向的函數,μ是流體的黏度,dU(y)/dy為速度法向梯度。欲精確給定靜態標定所用壁面剪應力τw,理想的辦法是精確測定流體黏度μ和速度法向梯度dU(y)/dy。基于現有測量技術,前者可以較為方便地實現,而后者則較為不易。如以平板流動[4-5]作為標準壁面剪應力給定為例,采用HWA、LDV或PIV等手段在極近壁面區域邊界層內(粘性底層)測量流動速度(速度梯度),均無法免于各自的局限或困難;若簡化處理,以經驗公式給出平板流動壁面剪應力τw,則試驗條件往往未必能嚴格滿足,估算也就相應難免失于粗疏。以相對旋轉的圓筒或盤片造成庫塔流動[6]給定壁面剪應力τw可以視為平板流動法的一種變通,等同于是建立在一平板平行于另一靜止平板作相對運動形成純剪切流動的機理上,也是以測取速度(速度梯度)為給定手段;采用這類方法需要精確地控制轉動件轉速并在扇面或弧線上布置待標定的壁面剪應力傳感器,在水下場合實施起來較為復雜。
實際上,傳感器靜態標定所需的基準壁面剪應力τw的給定,除了直接依靠速度(速度梯度)獲取,也可以流動的其他主要參量,如流量、壓力等的測量為間接的橋梁,只要在壁面剪應力和這些流動參量間建立起明確的聯系,并有相應的標定裝置。如比較常用的微型寬扁槽道[7],由極小間距(幾百μm)的2個平行平板及側壁形成,槽道的高h遠小于寬w,槽道中的流體流動可認為是平行平板的二維流動(層流),如圖1和2所示,流速分布只與槽道高度方向有關:
(3)
式中U0為槽道中心最大流速,其測量在微幾何尺度下較為困難,可通過測量總體流量Q來解決:
(4)
根據剪應力公式(2),可導出:
(5)
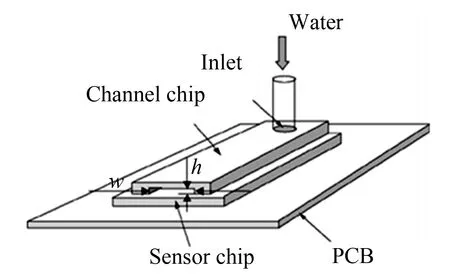
圖1 微型寬扁槽道結構示意圖
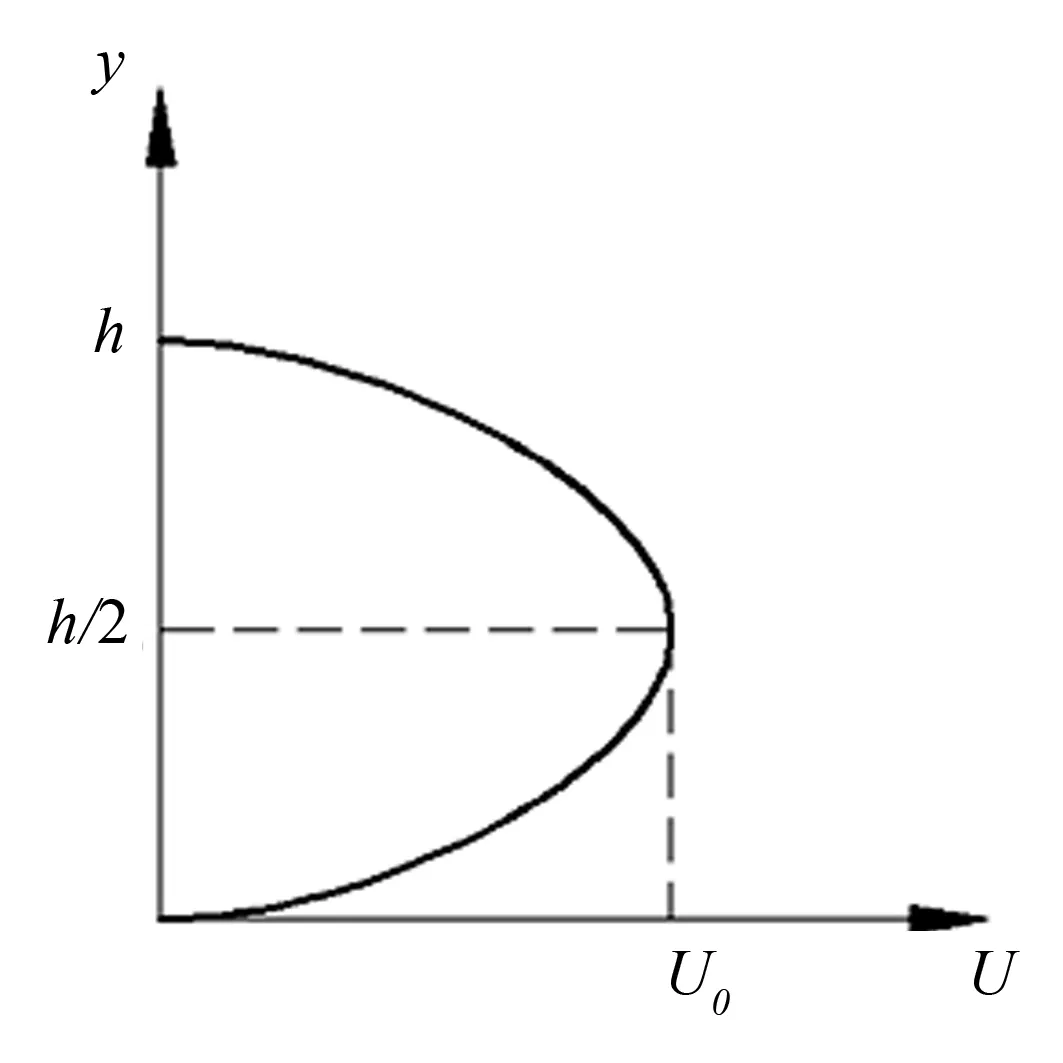
圖2 微型寬扁槽道流速分布示意圖
可見對此流動特性已知且性能穩定的微型寬扁槽道,基準壁面剪應力與流道內流量之間存在一一對應關系,因而可通過調節槽道流量給定不同的壁面剪應力。此外還有圓形層流管道模型[4](假設管道沿程壓力線性分布),也可通過測量平均流速(流量)或出入口兩端壓差確定壁面剪應力。但因是基于層流模型,此類2種方法可用的標定速度和雷諾數有限,所能給定的壁面剪應力很小,難以供較高流動速度下的MEMS壁面剪應力傳感器陣列水下標定所用。
以常用的微型寬扁槽道為參考,本文發展了較大尺度寬扁矩形截面流道。粘性流體流經該流道時,因摩擦形成壁面剪應力的作用使得流體流動受阻;為了克服所受阻力,維持流體的運動,需要消耗一部分能量。這部分消耗的能量主要表現為沿程壓力損失,它主要取決于流道的長度、截面尺寸、介質的流速和粘度等,且流態不同,沿程壓力損失不同。當上述因素確定后,就可以通過測量流道的沿程壓力損失來確定壁面剪應力[5]。
對于實驗中水平放置的矩形截面流道,取充分發展的一段槽道流為研究對象,如圖3所示,其受力平衡公式為:
(6)
其中,Ff=τωBL(H?B?L,所以忽略矩形流道側面的摩擦力,仍視為二維模型)。可以得到如下表面摩擦力計算公式:
(7)
基于充分發展的槽道流的沿程壓力損失測量,此靜態標定法在層流和湍流條件下均適用(而不必受限于層流要求),因此傳感器的標定可以在相對較高的雷諾數下進行。本文研發的矩形截面流道(標定裝置)長2350mm、寬250mm、高20mm,配備有穩定段、收縮段等以保持流動穩定,如圖4所示。試驗段設計水速范圍0.5~5m/s,可給定最大壁面剪應力達50Pa,與后續擬開展的水中航行體模型壁面剪應力測量試驗使用條件保持一致。
1)功能強大、性能指標高。大型儀器設備普遍具有普通設備所不具備的功能強大、性能指標高等特點[5]。例如:有的設備能完成數據采集、建模、加工控制與質量檢驗等完備功能;有的設備運行精度高,達到微米、納米精度;有的設備速度快,達到10 g的快速啟停等。
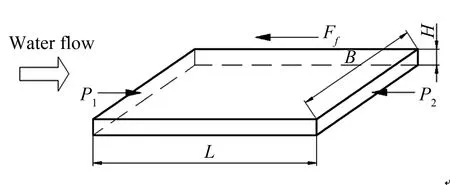
圖3 充分發展槽道流受力示意圖
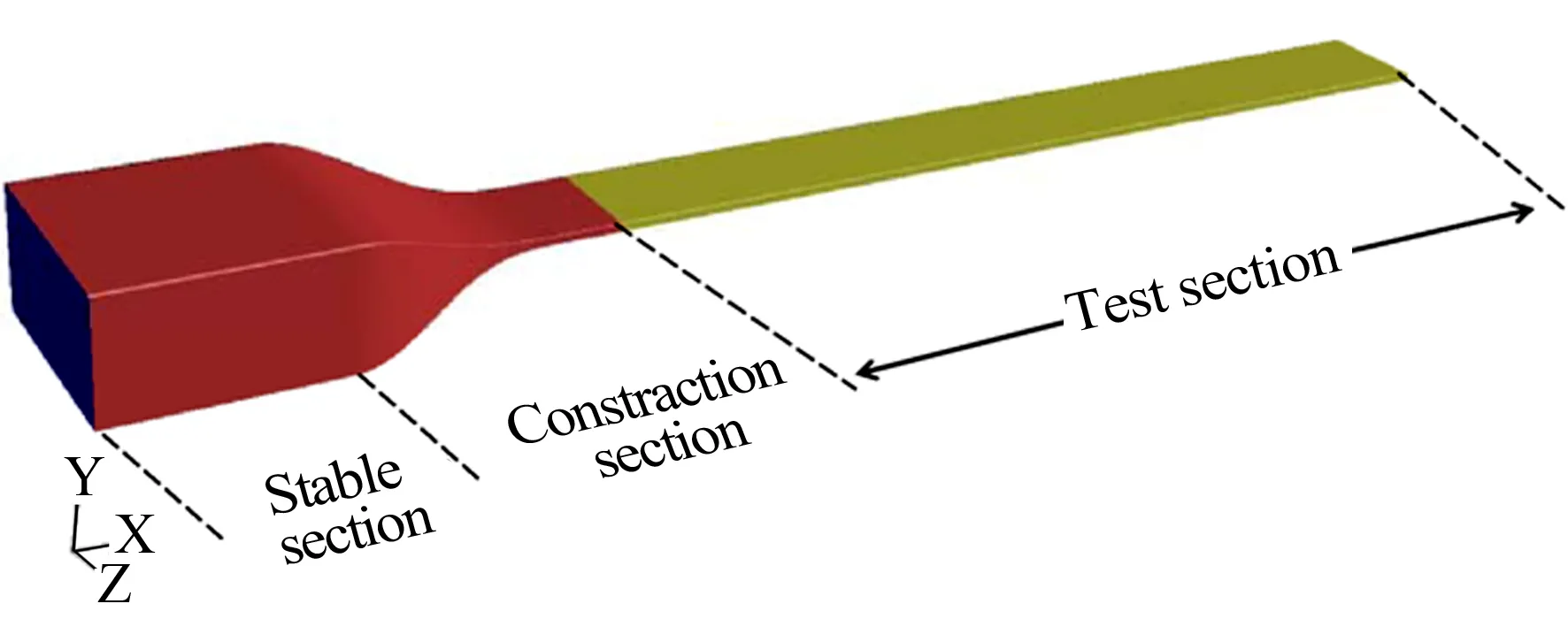
圖4 矩形截面流道裝置示意圖
2 數值計算分析與靜態標定方案設計
為充分了解試驗段中的流動情況,設計和優化靜態標定方案,采用CFD數值模擬結合理論分析預判矩形截面流道(標定裝置)充分發展段。在Fluent中建立穩定段、收縮段和試驗段的1/4對稱模型,進行數值計算。湍流模式采用Standardκ-ω;以穩定段入口為速度入口邊界,試驗段出口邊界條件為壓力出口邊界條件,計算網格數為7×106。
通過計算獲得不同水速下流道沿程壁面剪應力分布,如圖5所示。可見,隨著距試驗段入口距離L的增加,τw值逐漸趨于穩定(流動充分發展);隨著水速增加,τw值增加,τw值達到穩定所需的距離L也相應增加。如在0.57m/s水速下,幾乎在試驗段入口處,τw值即已趨于穩定;而對水速為4.04m/s的水流,則需要在距入口近1m處,τw值變化才趨于平緩。因此,在0.5~5m/s水速范圍內開展MEMS剪應力傳感器靜態標定實驗,可取距離試驗段入口1m以后(L>1m)為槽道流充分發展段。圖6給出了流道沿程靜壓分布云圖(以V=2.29m/s為例),根據靜壓計算結果可合理選取用于沿程壓力損失測量的差壓變送器。
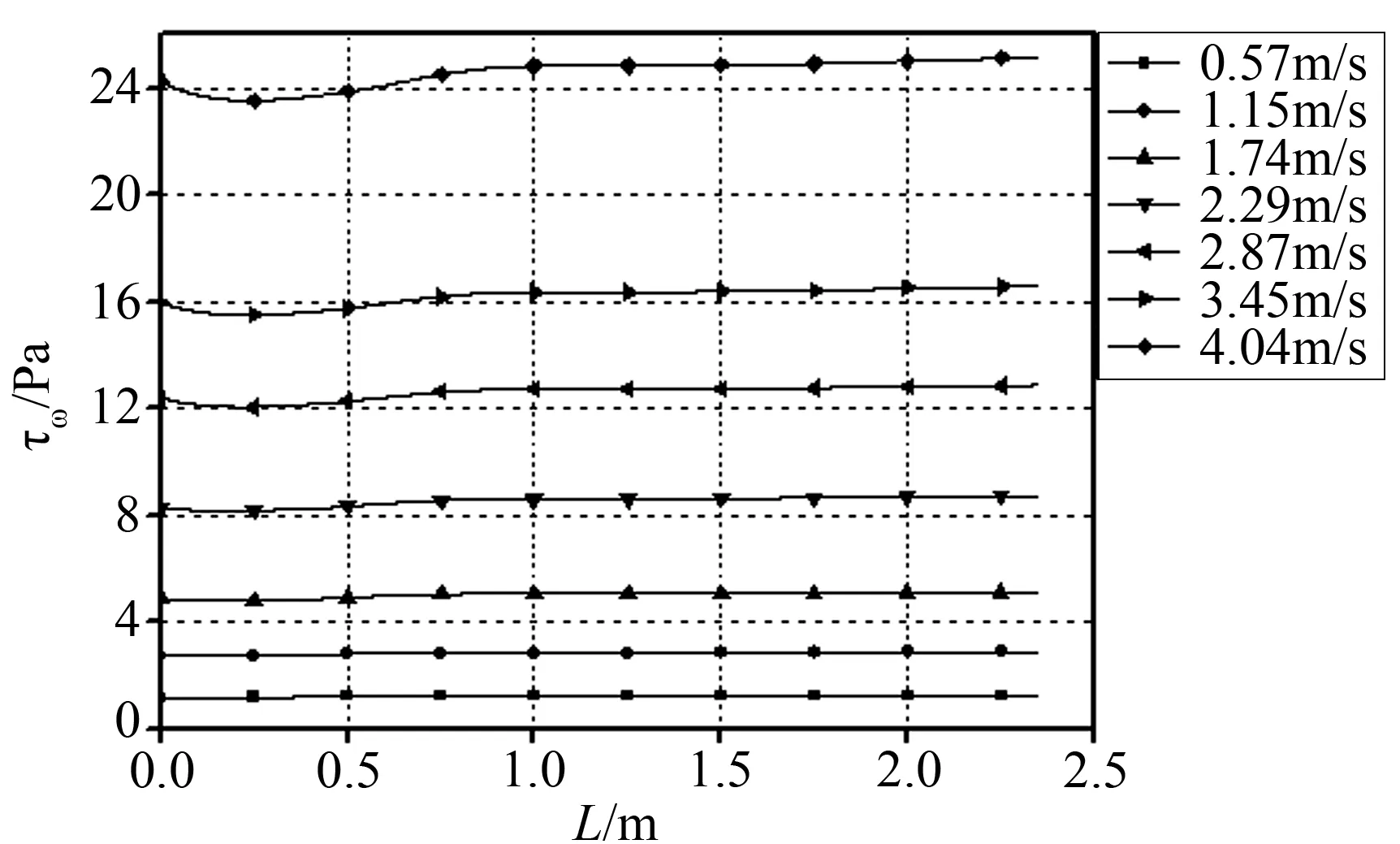
圖5 標定裝置試驗段壁面剪應力分布
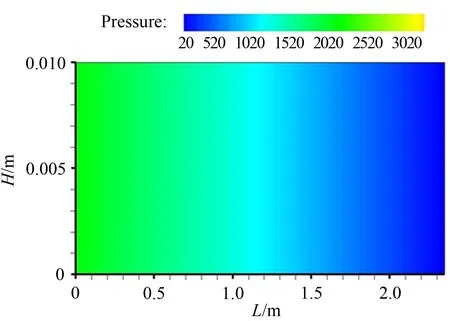
圖6 標定裝置試驗段靜壓分布云圖(V=2.29m/s)
設計的靜態標定方案如圖7所示。在流道下表面沿流程間隔100mm均布測壓孔,通過測壓管路連接壓力變送器,可測量獲得不同水速下流動充分發展段沿程壓力損失Δp/L,進而可由壁面剪應力與沿程壓力損失關系(式(7))得到給定的壁面剪應力量值。將待標定傳感器平齊安裝于流道上表面,中心位置距流道入口距離L=1675mm,位于流動充分發展段。標定水速V由LDV(激光多普勒測速儀)在流動充分發展段中心線上測得[8]。

圖7 MEMS壁面剪應力傳感器陣列水下靜態標定方案示意圖(單位:mm)
Fig.7 Schematic diagram of underwater calibration of MEMS wall shear stress sensor
3 MEMS熱膜式壁面剪應力傳感器陣列標定
實驗測量水速在0.5~5m/s范圍內流動充分發展段的沿程壓力損失,典型結果如圖 8 所示,可見流動充分發展段沿程壓力損失呈良好的線性分布。由壓力損失根據式(7)導出的不同水速下流動充分發展段壁面剪應力τw分布則如圖9所示,其中同時給出了前面所述靜態標定方案設計時數值計算的結果,可見與實驗所得數據基本符合。
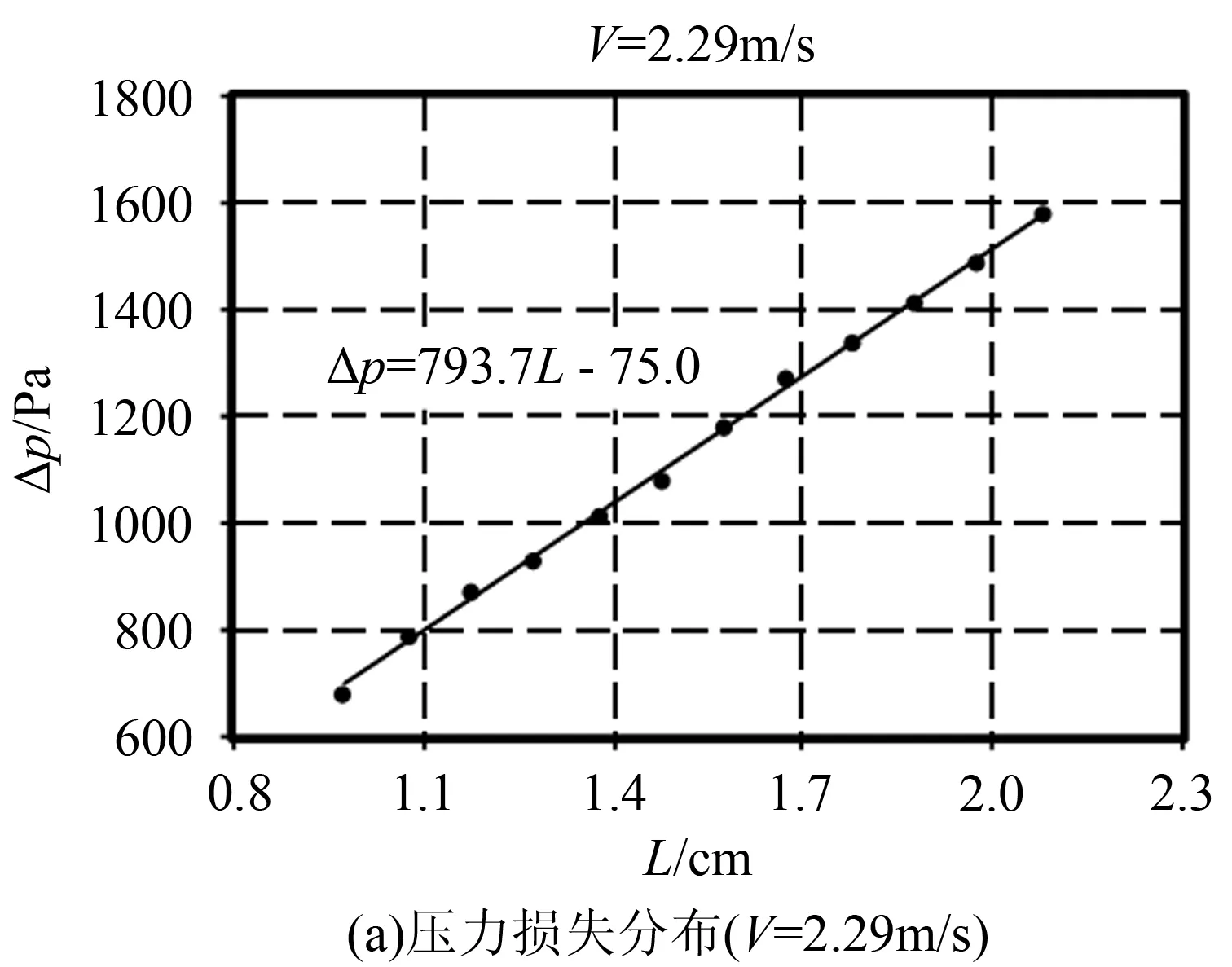
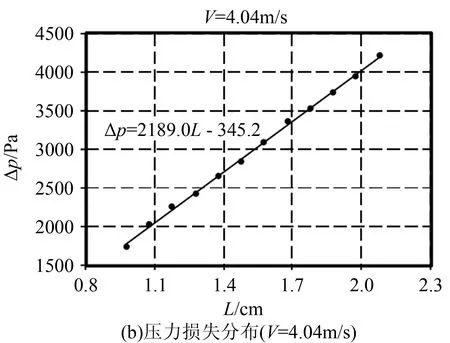
圖8 流動充分發展段沿程壓力損失分布
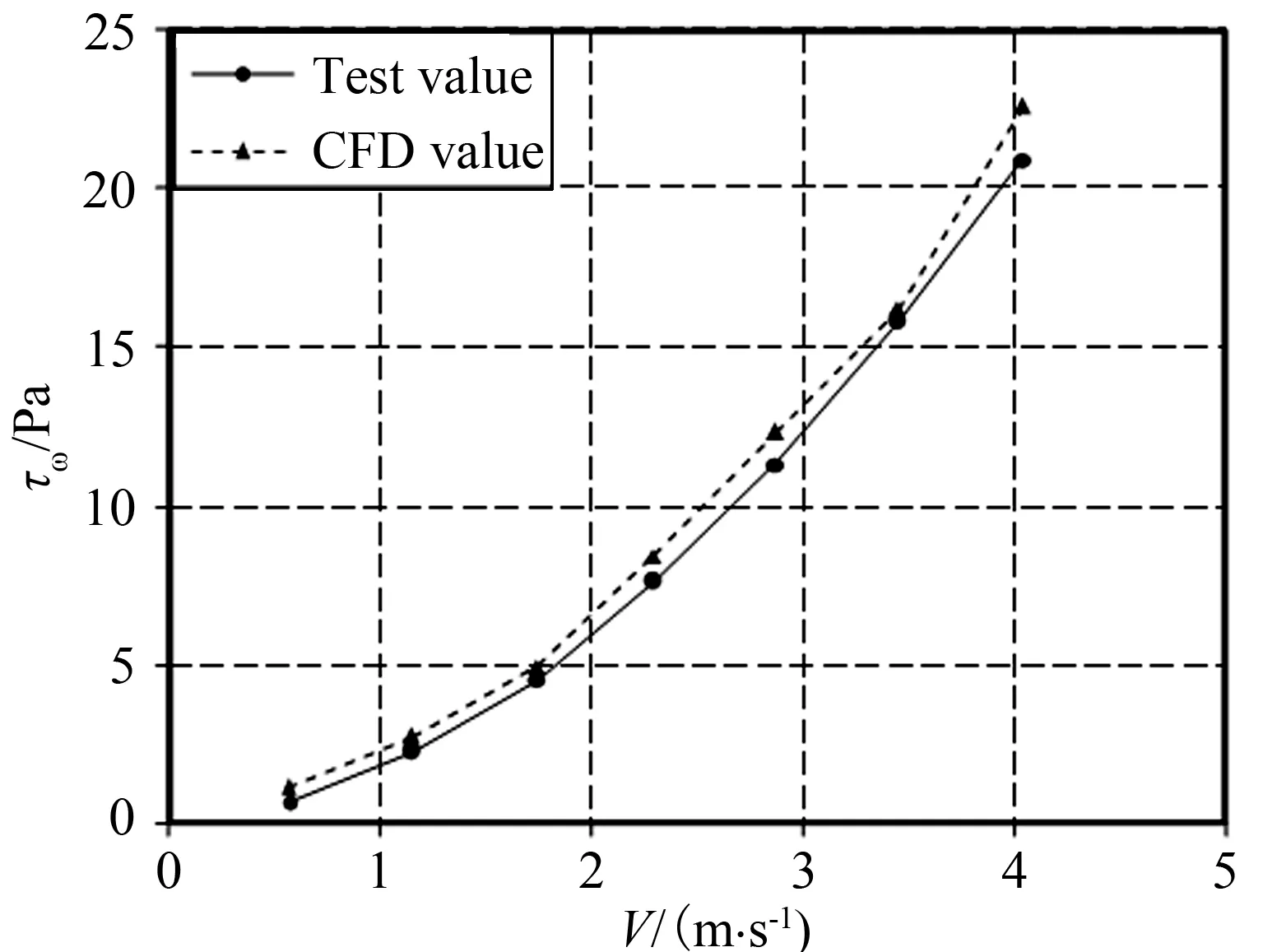
圖9 不同水速下流動充分發展段壁面剪應力分布
Fig.9 Wall shear stress distribution with water velocities in fully developed flow section
標定對象,即MEMS熱膜式壁面剪應力傳感器陣列,由西北工業大學微納米實驗室研制提供,如圖10所示。該傳感器陣列平面總尺寸為長×寬=70mm×50mm,包括10個傳感器單元,單元間距5mm;傳感器單元尺寸為長×寬=3mm×50μm;采用Parylene C作為防水材料,總厚度為75μm。
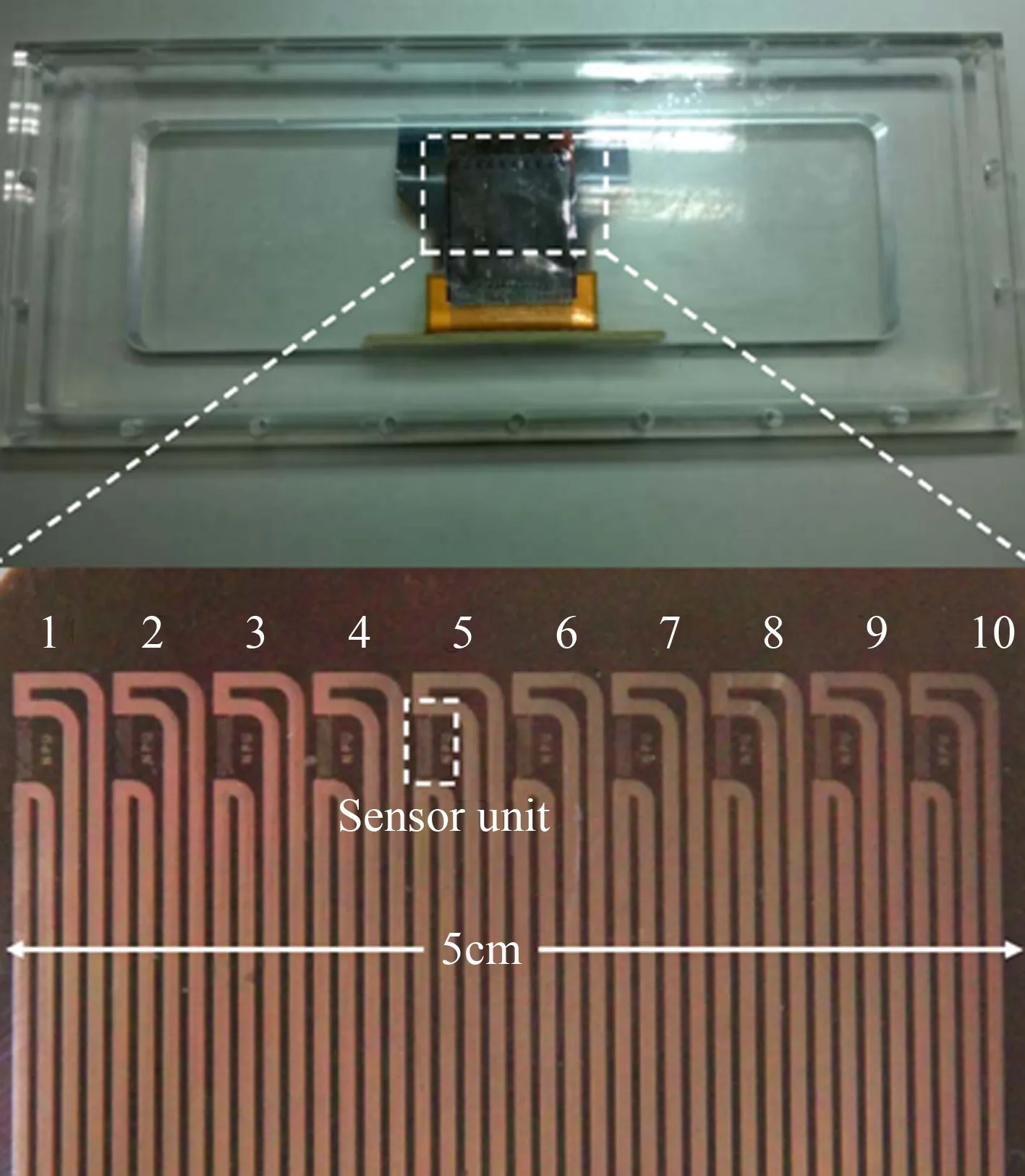
圖10 MEMS熱膜式壁面剪應力傳感器陣列
該MEMS傳感器陣列在恒流驅動模式下工作,溫度電阻系數為2800±10ppm/℃。采用經典的熱膜式傳感器標定公式來表述壁面剪應力傳感單元輸出電壓E與壁面剪應力τw輸入之間的關系[9-10]:
(8)
通過靜態標定實驗得到的MEMS剪應力傳感器(如陣列中3#、5#和7#傳感單元)的標定曲線如圖11所示。
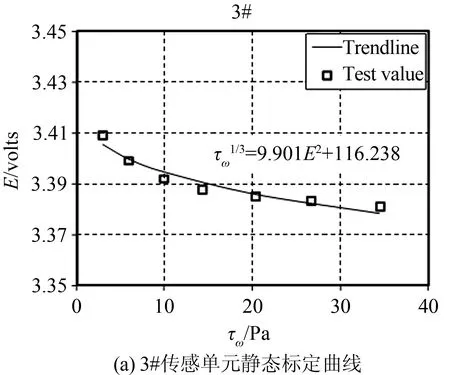
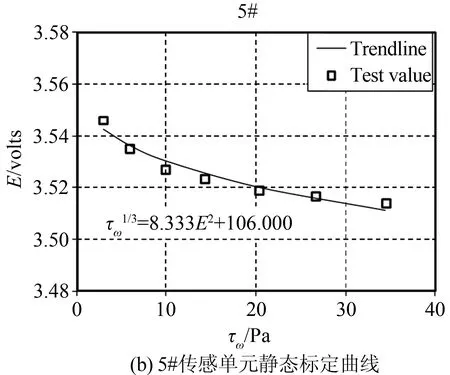
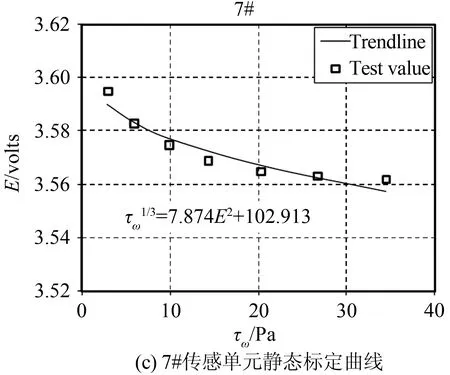
圖11 傳感器靜態標定曲線示例
可以看到,各傳感單元靜態標定曲線具有相似特征且與回歸曲線吻合較好,但標定系數各不相同。這是由于存在加工誤差,MEMS陣列中各傳感單元的初始阻值略有差別(各傳感器不可能做到完全一致);而且對熱敏式傳感器而言,在粘性底層中測量剪應力,其自身也會形成較薄的熱對流層,這樣,位于下游的傳感器在測量過程中不可避免地要受到上游傳感器的影響。因此,必須強調,在開展MEMS壁面剪應力傳感器陣列靜態標定時,需要對各傳感單元作獨立通道并行、同時標定。
另需注意的是,熱敏類傳感器受環境(介質)溫度的影響是比較顯著的[11-12],因而對MEMS傳感器陣列的水下標定和使用還須強調“現場”因素。在本文開展靜態標定實驗過程中,監測水介質溫度保持在15℃左右(基本恒定)。關于環境參數變化對標定系數的影響(不確定度分析),后續還將開展深入研究。
4 結 論
基于充分發展槽道流原理建立了1種新型水下壁面剪應力給定裝置及相應的傳感器靜態標定方法,并開展了1種MEMS熱膜式壁面剪應力傳感器陣列的水下標定實驗。結論如下:
(1) 該型壁面剪應力給定裝置及靜態標定法適用于層流和湍流狀態,保證了MEMS壁面剪應力傳感器水下標定可以在相對較高的雷諾數下進行;
(2) 采用數值模擬結合理論分析優化設計壁面剪應力傳感器靜態標定方案是有效的,測試結果表明數值計算較好地模擬了壁面剪應力給定條件;
(3) MEMS壁面剪應力傳感器陣列各傳感單元靜態標定曲線具有相似特征且與回歸曲線吻合良好,但標定系數各不相同,對各傳感單元作并行同時標定是必要的。
致謝:本文研究工作得到了水動力學重點基金(14010511CB32)和國家重大科學儀器設備開發專項(2013YQ040911)的支持;西北工業大學馬炳和、鄧進軍等設計研制了MEMS傳感器陣列,并對本文標定實驗提供了幫助,在此表示感謝。
[1] 呂海峰, 姜澄宇, 鄧進軍, 等. 用于壁面切應力測量的微傳感器設計[J]. 機械工程學報, 2010, 46(24): 54-60.
Lyu Haifeng, Jiang Chengyu, Deng Jinjun, et al. Design of micro sensor for wall shear stress measurement[J]. Journal of Mechanical Engineering, 2010, 46(24): 54-60.
[2] Ma B, Ren J, Deng J, et al. Flexible thermal sensor array on PI film substrate for underwater applications[C]. Micro Electro Mechanical Systems (MEMS), 2010 IEEE 23rd International Conference on. IEEE, 2010: 679-682.
[3] 白亞磊, 明曉, 黃鳳兵. 底層隔板法流體壁面剪切力的測量研究[J]. 實驗流體力學, 2011, 25(5): 85-88.
Bai Yalei, Ming Xiao, Huang Fengbing.The research of measuring skin friction with a sublayer fence[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(5): 85-88.
[4] 吳望一. 流體力學[M]. 北京: 北京大學出版社, 2004.
[5] 史里希庭 H, 著. 徐燕侯,徐立功,徐書軒,譯. 邊界層理論[M]. 北京: 科學出版社, 1988.
[6] Zuckerwar A J, Scott M A. A rotary flow channel for shear stress sensor calibration[C]. 24th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, Portland, Oregon, 2004.
[7] Xu Y, Lin Q, Lin G, et al. Micromachined thermal shear-stress sensor for underwater applications[J]. Journal of Microelectro- mechanical Systems, 2005, 14(5): 1023-1030.
[8] Christoph Skupsch, Humberto Chaves, Christoph Brucker. Extend laser doppler anemometer for near wall measurements[C]. 15th Int Symp on Applications of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 2010.
[9] Liu C, Huang J B, Zhu Z, et al. A micromachined flow shear-stress sensor based on thermal transfer principles[J]. Journal of Microelectromechanical Systems, 1999, 8(1): 90-99.
[10] 趙建國, 馬炳和, 鄧進軍. 用于壁面剪應力測量的柔性熱敏傳感器陣列[J]. 微納電子技術, 2009, 46(7): 414-418.
Zhao Jianguo, Ma Binhe, Deng Jinjun. Flexible thermal sensor array for wall shear stress measurements[J]. Micronanoelectronic Technology, 2009, 46(7):414-418.
[11] 楊少華, 馬炳和. 微型熱敏剪應力傳感器的溫度補償[J]. 儀表技術與傳感器, 2012, (9): 9-11.
Yang Shaohua, Ma Binghe. Temperature compensation of micro thermal shear stress sensor[J]. Instrument Technique and Sensor, 2012, (9): 9-11.
[12] 馬炳和, 王毅, 姜澄宇, 等. 柔性熱膜剪應力傳感器水下測量溫度修正[J]. 實驗流體力學, 2014, 28(2): 39-44.
Ma Binghe, Wang Yi, Jiang Chengyu, et al.Temperature correction of flexible thermal shear stress sensor for underwater measurements[J]. Journal of Experiments in Fluid Mechanics, 2014, 28(2): 39-44.
(編輯:楊 娟)
Calibration of MEMS wall shear-stress-sensors array for underwater applications
Tian Yukui, Xie Hua, Huang Huan, Sun Hailang, Zhang Nan, Shen Xue
(National Key Laboratory of Science and Technology on Hydrodynamics, China Ship Scientific Research Center, Wuxi Jiangsu 214082, China)
The measurement of wall shear stress on hydrodynamic surface is important for the design of advanced naval technology, and, accurate calibration, especially the static calibration, of the shear stress sensor is indispensable to any practical measurement. In the paper, an underwater calibration apparatus is developed based on analyzing the existing calibration methods. CFD simulation is performed to predict the wall shear stress input for the static calibration, and facilitate the design of calibration schedule. Then a typical thermal MEMS shear-stress-sensors array is statically calibrated for underwater applications. The calibration coefficients of the sensors in the array are obtained in situ, which would be of use to the future underwater model tests.
wall shear stress;MEMS;sensors array;underwater;calibration
1672-9897(2015)02-0008-06
10.11729/syltlx20140109
2014-09-18;
2015-02-02
水動力學重點基金(14010511CB32);國家重大科學儀器設備開發專項(2013YQ040911)
TianYK,XieH,HuangH,etal.CalibrationofMEMSwallshear-stress-sensorsarrayforunderwaterapplications.JournalofExperimentsinFluidMechanics, 2015, 29(2): 8-12,25. 田于逵, 謝 華, 黃 歡, 等.MEMS壁面剪應力傳感器陣列水下標定實驗研究. 實驗流體力學, 2015, 29(2): 8-12,25.
O352
A

田于逵(1968-),男,湖北潛江人,研究員。研究方向:船舶流體測試技術,復雜流動的精細測量與控制研究。通信地址:江蘇無錫116信箱(214082)。E-mail:tyk702@sina.com
*通信作者 E-mail: tyk702@sina.com
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
