GPS間歇性失效環境下的低成本多傳感器組合導航系統研究
2015-06-21 12:50:55吳振鈿吳發林鐘海波
航空兵器 2015年3期
吳振鈿,吳發林,付 勇,趙 剡,鐘海波
(1.北京航天航空大學,北京 100191;2.航天恒星科技集團有限公司,北京 100086)
GPS間歇性失效環境下的低成本多傳感器組合導航系統研究
吳振鈿1,吳發林1,付 勇1,趙 剡1,鐘海波2
(1.北京航天航空大學,北京 100191;2.航天恒星科技集團有限公司,北京 100086)
針對GPS/SINS組合導航系統在GPS間歇性失效環境下導航精度迅速下降的問題,設計了一種低成本的多傳感器組合導航系統。該系統由陀螺儀、加速度計、氣壓計、磁力計和GPS組成,通過卡爾曼濾波器進行信息融合來實現精確的導航定位。針對GPS間歇性失效環境,利用氣壓計和磁力計的測量信息來輔助SINS進行導航。采用內置MEMS多傳感器的智能產品對設計的系統進行了實驗驗證。實驗結果表明,該系統可以在GPS間歇性失效的環境下實現精確的導航定位。
GPS失效;多傳感器;組合導航;卡爾曼濾波
0 引 言
全球定位系統(GPS)可以在全球任何地方任何時間提供精確的導航信息,但輸出頻率低,易受自然或人為干擾[1-3]。慣性導航系統(INS)輸出頻率高且不受外界環境干擾,是一種自主式導航系統,但其導航誤差隨時間發散,無法長時間工作[4-6]。GPS/INS組合導航系統能夠充分發揮兩個子系統各自的優勢,是目前世界上廣泛采用的組合導航系統。但它有一個顯著缺點:一旦GPS長時間失效,組合導航系統又變成了單純的慣性導航[7-9]。
為解決這一問題,可以建立盡量符合實際情況的系統誤差模型,當GPS不可用時,使用系統誤差模型進行誤差補償。楊麗采用基于遺傳算法的小波神經網絡對GPS/INS信號建立INS位置、姿態、速度誤差預測模型,當GPS失效時,利用已建立的預測模型預測INS位置、姿態、速度誤差來修復INS數據[10];賈鶴鳴等利用基于傅里葉基神經網絡算法的頻譜分析方法建立了一個時域脈沖響應模型,在GPS失效時,通過對INS信號與脈沖響應模型進行卷積,即可得到組合導航系統的輸出,并將此作為GPS失效時的過渡信號[11]。另一種方法是使用其他導航傳感器輔助INS,提高系統在GPS無效時間段內的精度。徐士厚利用電子羅盤的姿態觀測和里程儀的速度觀測輔助INS[7];郭美玲利用汽車傳感器中的輪速傳感器、加速度傳感器、橫擺角傳感器和方向盤傳感器的觀測量來輔助INS[12];陳帥等利用多普勒雷達的速度觀測和氣壓高度表的高度觀測來輔助INS[13]。
隨著微機電系統(MEMS)技術的不斷進步, MEMS傳感元器件體積越來越小,精度越來越高,價格越來越低,應用于組合導航系統中變得簡單易行[14-15]。基于以上考慮,本文設計了一種GPS間歇性失效環境下的低成本多傳感器組合導航系統。該系統由慣性傳感器、氣壓計、磁力計和GPS組成,并通過卡爾曼濾波器進行信息融合來實現精確的導航定位。當GPS失效時,利用氣壓計和磁力計的測量信息來輔助SINS進行導航。
1 多傳感器組合導航系統設計
1.1 系統結構設計
多傳感器組合導航系統結構原理如圖1所示。
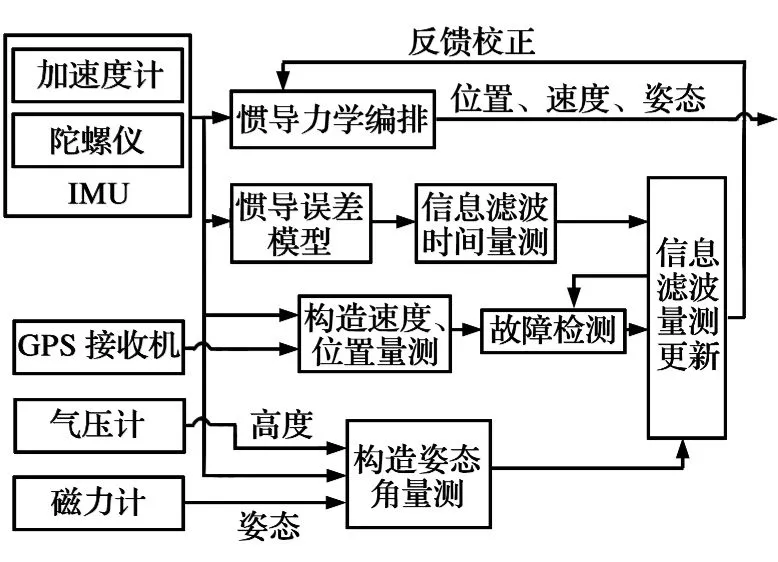
圖1 多傳感器組合導航系統結構原理圖
該系統分別由慣性測量單元(加速度計和陀螺儀)、GPS、氣壓計、磁力計對載體的導航參數獨立地進行測量:慣性測量單元(IMU)測量信息經過器件標定系數補償后可得到載體坐標系下的三維比力和角速度信息,然后通過四元數等算法進行捷聯解算,得到地理坐標系下速度、位置和姿態信息[13];GPS接收機接收來自衛星發射的導航信號,捕獲和跟蹤各衛星信號的偽隨機碼和載波,從中解調出衛星星歷、時鐘改正參數等信息,從而得到偽距測量值、偽距變化率和載波相位觀測值,依此計算用戶接收機的三維位置(經度、緯度和高度)和時間信息[7];根據氣壓計測得的大氣壓強可以計算出載體的高度;磁力計利用磁場傳感器對地球磁場進行測量,根據磁力計的測量值可以計算出姿態信息。然后,利用GPS與SINS相應的輸出作差構成位置、速度的觀測量,并利用IMU、氣壓計、磁力計的測量信息構造高度和姿態角觀測量。最后將前面所得觀測量送入組合導航濾波器進行濾波計算,從而獲得系統誤差的最優估計值,利用該估計值對系統進行實時的誤差校正,并將校正后慣導輸出的導航參數作為組合導航系統的輸出。各觀測量與SINS誤差模型經信息濾波即可得到SINS的各項誤差估計,進而反饋回SINS的力學編排進行反饋校正。當GPS失效時,則將其測量的觀測信息矩陣置0,相當于GPS被斷開,組合導航濾波器對除GPS外觀測量進行信息融合,并利用所得到的最優估計值對系統進行實時的誤差校正。
1.2 系統狀態方程
慣導系統的導航坐標系取為地理坐標系,慣導誤差方程作為組合導航系統的狀態方程[16]。系統狀態方程如下:

要建立導航系統的狀態方程,首先需確定狀態方程中各狀態變量的形式及維數,這里選取平臺失準角、速度誤差、位置誤差以及陀螺儀和加速度計的零偏作為狀態變量。系統狀態變量X為

系統噪聲W(t)為

式中:ωx,ωy,ωz,ax,ay,az分別為陀螺儀和加速度計在載體坐標系下的噪聲,假設是均值為0,呈正態分布的白噪聲。
F(t)為15×15維系統動態矩陣:

其中:FSINS為對應SINS系統9個基本導航參數的系統陣[17];FS為9×6維矩陣:
式(1)中G(t)為15×6維矩陣:
1.3 系統量測方程
1.3.1 GPS/SINS量測方程
GPS/SINS量測方程以GPS接收機與捷聯慣導系統輸出的位置、速度之差作為外部觀測量,并將觀測誤差歸入量測噪聲中。GPS/SINS量測方程為

式中:Z1為外部觀測量;H1(t)為量測矩陣;V1(t)為觀測噪聲。
其中:
式中:Ve,Vn,Vu分別為東向速度、北向速度和天向速度;L,λ,h分別為緯度、經度和海拔高度;下標SINS,GPS分別表示捷聯慣導和GPS的測量值。
1.3.2 SINS/GPS/氣壓計量測方程


式中:V2(t)為觀測噪聲;量測矩陣H2(t)為

1.3.3 SINS/地磁計量測方程


式中:V3(t)為觀測噪聲;量測矩陣H3(t)為[6]
整個系統的量測方程可表示為
1.4 多傳感器數據融合
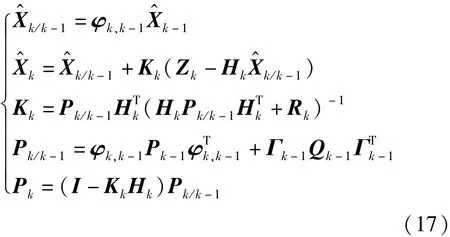
對于GPS/SINS/氣壓計/磁力計組合導航系統,線性化及離散化后系統模型如下:

式中:Xk為系統狀態向量;Zk為量測向量;φk,k-1為系統狀態轉移矩陣;Γk-1為系統噪聲矩陣;Hk為量測矩陣;Wk-1為離散型系統零均值白噪聲;Vk為離散型零均值量測白噪聲向量;Xk,Wk-1和Vk互不相關。對各個子系統的數據融合采用卡爾曼濾波算法,方程如下:
1.5 高度平滑
GPS數據更新頻率低,且高度測量精度低,而氣壓計數據更新頻率高,相對精度高,能更好跟蹤載體的高度變化。但是當氣溫、地形發生變化時,會引發氣壓異常,進而影響氣壓計的高度測量。本文利用由氣壓計給出的海拔高度對GPS高度進行平滑。這樣能夠利用氣壓計和GPS系統的優點,彌補各自不足,提高高度導航精度。平滑方程如下:
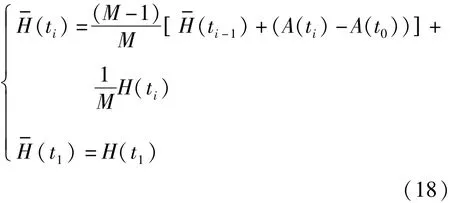
式中:A為由氣壓計計算得到的高度;H為由GPS計算得到的高度;M為步長;為平滑后的高度。
2 實驗與分析
為檢驗GPS/SINS/氣壓計/磁力計組合導航系統在GPS間歇性失效環境下的導航精度,進行了室外跑車實驗。將智能手機三星Galaxy Note II放置于試驗車的平臺上。該型手機內置GPS、陀螺儀、加速度計、氣壓計以及地磁計等MEMS傳感器,能夠采集實驗所需數據以滿足實驗要求。其中,GPS的數據更新頻率為1 Hz,其他MEMS傳感器的數據更新頻率為20 Hz。跑車實驗在體育場固定跑道進行,第一次實驗GPS接收機正常工作,第二次實驗GPS接收機處于關閉狀態,每次實驗時間為1 000 s。將關閉GPS接收機后的系統輸出信息分別與各子系統均能正常工作時的系統輸出信息作比對,得到GPS失效環境下的組合導航系統的測量精度。
2.1 位置結果分析
圖2和圖3分別為GPS失效時的GPS/SINS組合導航系統和多傳感器組合導航系統在經度、緯度和高度方面的誤差曲線圖。
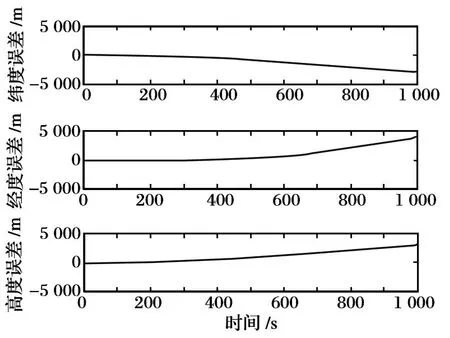
圖2 GPS/SINS組合導航系統位置誤差曲線

圖3 多傳感器組合導航系統位置誤差曲線
對比圖2~3可知,在GPS失效的情況下, GPS/SINS組合導航系統的位置誤差是發散的,增長較快;而多傳感器組合導航系統的位置誤差是收斂的,說明多傳感器組合導航系統在GPS失效時能夠很好抑制SINS誤差的發散。其具體誤差分析結果如表1~2所示。
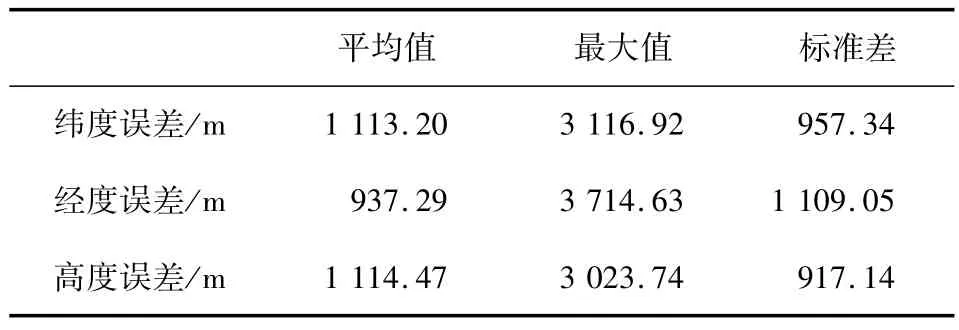
表1 GPS/SINS組合導航系統位置誤差統計
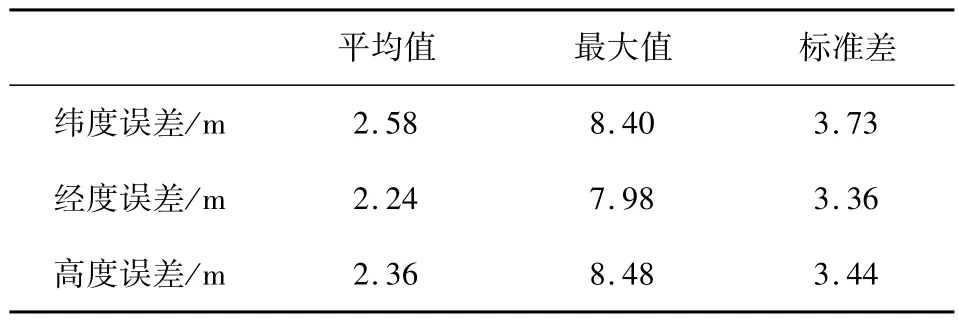
表2 多傳感器組合導航系統位置誤差統計
2.2 速度結果分析
圖4和圖5分別為GPS失效時的GPS/SINS組合導航系統和多傳感器組合導航系統在東向、北向和天向方面的速度誤差曲線圖。
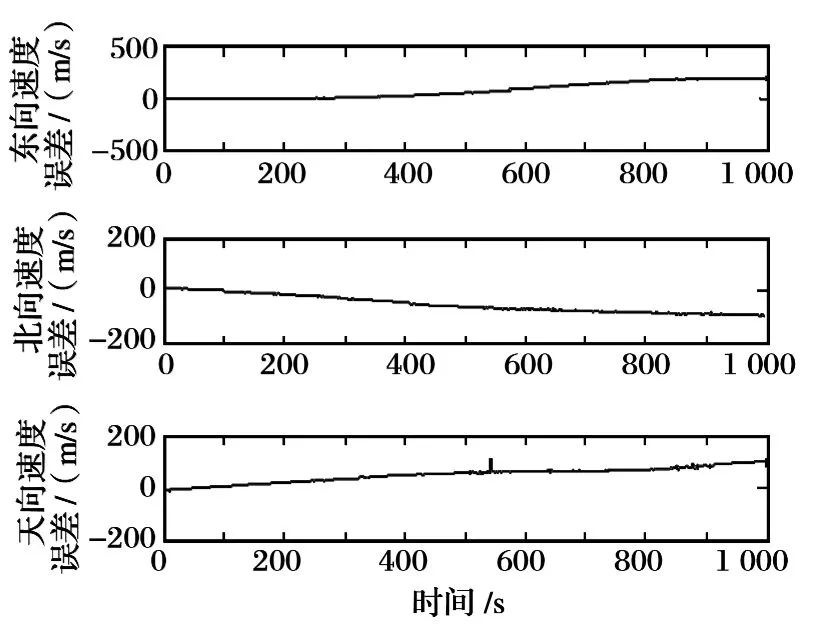
圖4 GPS/SINS組合導航系統速度誤差曲線
圖4中,GPS失效的情況下,GPS/SINS組合導航系統的速度誤差增長較快,呈發散狀態;由圖5可知多傳感器組合導航系統的速度誤差始終是收斂的。其具體誤差分析結果如表3~4所示。
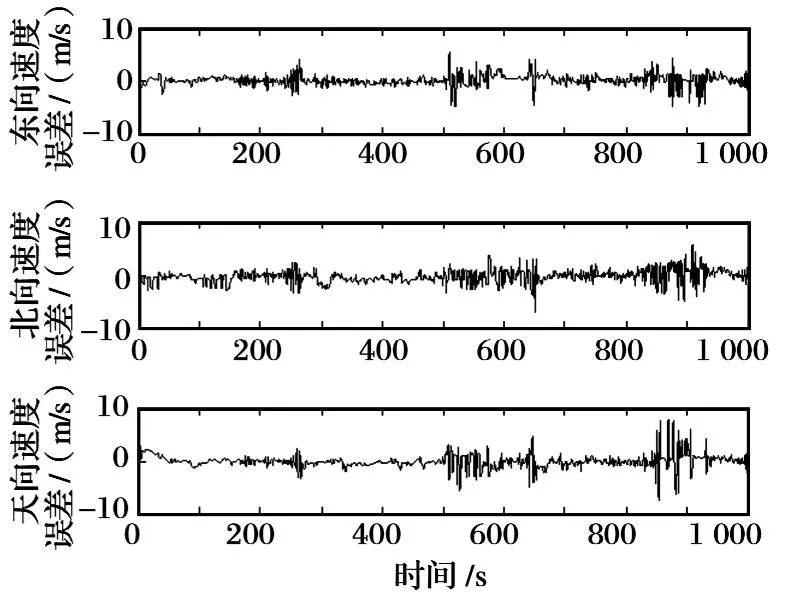
圖5 多傳感器組合導航系統速度誤差曲線
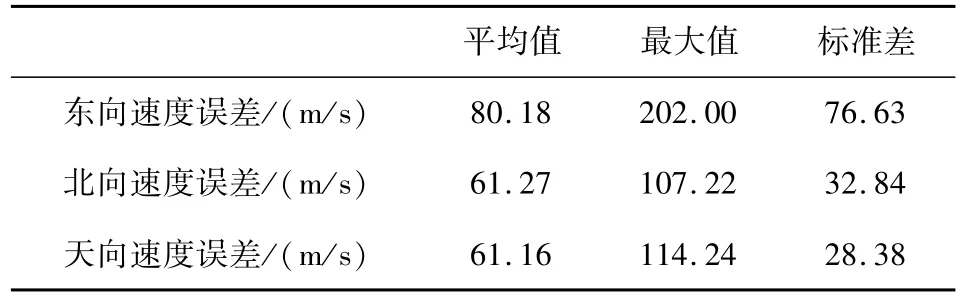
表3 GPS/SINS組合導航系統速度誤差統計
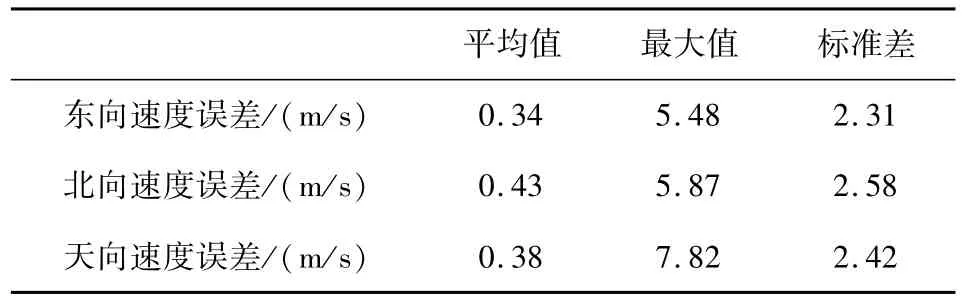
表4 多傳感器組合導航系統位置誤差統計
3 結 論
本文主要針對目前常用的GPS/SINS松組合在GPS無法使用時導航精度迅速下降的問題,設計了一種低成本的GPS/SINS/氣壓計/磁力計組合導航系統,并通過一系列實驗驗證了系統的可行性。該多傳感器組合導航系統體積小、成本低、性能可靠,具有良好的實用價值和應用前景。
[1]Zhao X,Syed Z,Wright D B,et al.An Economical and Effective Multi-Sensor Integration for Portable Navigation System[C]//Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation,Savannah,GA:ION GNSS,2009:2088-2095.
[2]董斌,馮海艷,劉正興.GPS/INS深組合技術探討[J].教練機,2012(1):42-47.
[3]譚顯裕.GPS的發展及GPS/INS組合制導系統[J].航天電子對抗,2003(5):6-9.
[4]Groves P D.Principles of GNSS,Inertial,and Multi-Sensor Integrated Navigation Systems[M].Artech House, 2008.
[5]王巍.慣性技術研究現狀及發展趨勢[J].自動化學報,2013,39(6):723-729.
[6]魏偉,武云云.慣性/天文/衛星組合導航技術的現狀與展望[J].現代導航,2014(1):62-65.
[7]徐士厚.基于多傳感器的車載組合導航系統關鍵技術研究[J].信息通信,2014(6):34-35.
[8]張學翠,張春濤,薛曉晶,等.GPS/INS組合導航技術研究[J].火力與指揮控制,2014(Z1):200-202.
[9]王健.提高SINS/GNSS組合導航系統定位精度的方法研究[J].現代導航,2014(1):7-10.
[10]楊麗.遺傳優化小波神經網絡在組合導航中的應用研究[D].南京:南京航空航天大學,2010.
[11]賈鶴鳴,宋文龍,車延庭.基于脈沖響應模型的GPS失效解決方法[J].山東科技大學學報(自然科學版),2013,32(1):79-83.
[12]郭美玲.MSINS/GPS/汽車傳感器組合導航系統研究[D].哈爾濱:哈爾濱工程大學,2013.
[13]陳帥,韓宇,曹飛,等.機載多傳感器組合導航系統設計[C]//中國自動化學會控制理論專業委員會B卷,2011.
[14]戴磊,齊俊桐,宋大雷,等.基于多傳感器融合的組合導航方法研究[J].儀器儀表學報,2009,30(6):69-76.
[15]Chang H W,Georgy J,El-Sheimy N.A Low Cost Multi -Sensors Navigation Solution for Sport Performance Assessment[C]//25th International Technical Meeting of the Satellite Division of the Institute of Navigation,Nashville,TN:ION GNSS,2012:3791-3798.
[16]徐田來,崔平遠,崔祜濤.車載多傳感器組合導航系統設計與實現[J].系統工程與電子技術,2008,30 (4):686-691.
[17]李倩.GPS/INS組合導航系統研究及實現[D].上海:上海交通大學,2010.
Research on Low-Cost Multi-Sensor Integrated Navigation System in Interm ittent GPS-Denied Environment
Wu Zhendian1,Wu Falin1,Fu Yong1,Zhao Yan1,Zhong Haibo2
(1.Beihang University,Beijing 100191,China;2.Space Star Technology Co.Ltd,Beijing 100086,China)
For the problem that the navigation precision of GPS/SINS integrated navigation declines rapidly under intermittentGPS-denied environment,a low-costmulti-sensor integrated navigation system is designed.The system consists of gyroscope,accelerometer,barometer,magnetometer and GPS,and achieves the purpose of accurate navigation and positioning by using Kalman filter for information fusion. For the intermittent GPS-denied environments,the system uses themeasurement information of barometer and magnetometer to assist SINS's navigation.This system is verified by using smart productwith built-in MEMSmultiple sensors.The experimental results show that the integrated navigation system can realize precise navigation and positioning under intermittent GPS-denied environment.
GPS-denied;multi-sensors;integrated navigation;Kalman filtering
TJ765;V249.32+8
A
1673-5048(2015)03-0013-05
2015-01-29
中國航天科技集團公司衛星應用研究院創新基金項目(2014_CXJJ-DH_07)
吳振鈿(1990-),男,福建三明人,碩士研究生,研究方向是儀器儀表工程、組合導航。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46