基于功率預測的變步長擾動觀測法MPPT研究
2015-06-19 16:18:59吳雷高興琳
電源技術 2015年3期
吳雷,高興琳
(江南大學電氣自動化研究所,江蘇無錫214122)
基于功率預測的變步長擾動觀測法MPPT研究
吳雷,高興琳
(江南大學電氣自動化研究所,江蘇無錫214122)
針對光伏陣列輸出特性,分析了傳統擾動觀測法的原理和不足,結合固定電壓法和基于功率預測的變步長擾動觀測法,提出了一種新的控制算法。使用Matlab/Simulink對該控制算法與傳統擾動觀測法進行了仿真比較。仿真結果表明該算法有效地提高了系統最大功率點跟蹤(MPPT)控制的動態響應速度和穩態跟蹤精度,此外,該算法對光照強度突變具有較強的抗干擾能力,能夠更好地適應環境變化。
MPPT;固定電壓法;功率預測;變步長;擾動觀測法
面對日益加劇的能源危機和環境污染問題,發展清潔的可再生能源成為世界各國的共識。太陽能因其儲量豐富、清潔無污染而得到廣泛關注,光伏發電是當前利用太陽能的一種重要形式,具有良好的發展前景。
光伏電池的輸出電壓和輸出電流會隨著日照強度和電池結溫的變化而呈現出強烈的非線性,而在特定的工作環境下又存在一個唯一的最大功率輸出點(MPP)。為了提高光伏電池的利用率,需要實時調節光伏電池的工作點使其始終工作于MPP(或附近),即實現最大功率點跟蹤(MPPT)。常用的MPPT控制方法有固定參數法(固定電壓法、固定電流法)、擾動觀測法及電導增量法[1]等。
固定參數法利用光伏器件在最大功率點工作時其工作電壓、電流與器件開路電壓、短路電流的近似比例關系進行控制,該方法只需檢測一個參數,控制簡單易行,但獲取開路電壓或短路電流要中斷系統正常工作,對系統運行存在干擾,且該方法所采用的控制關系是近似關系,無法實現最優控制,因此該方法控制精度低,僅適用于小功率場合。擾動觀測法(P&O)[2]是根據光伏器件在最大功率點處/=0的特性進行最大功率點跟蹤控制,每隔一定時間增加或減少光伏電池輸出電壓,觀測其輸出功率變化方向,從而決定下一步的控制策略。該方法由于結構簡單、被測參數少、容易實現,得到廣泛研究和應用;其缺點是系統總是在光伏電池最大功率點附近震蕩運行,產生一定的功率損失,且跟蹤步長的設定難以兼顧跟蹤精度和跟蹤速度,在光照等外界條件變化劇烈時容易出現誤判現象。增量電導法(IC)[3]是對擾動觀測法的改進,根據△P/△U=0可以得到dI/dU=-I/U,當系統滿足該關系式時,表明系統工作在最大功率點,由于它不需要比較電壓變化前后的功率、電壓變化情況,因此可以消除擾動觀測法在最大功率點附近的功率振蕩現象,但該方法需高精度的檢測器件,雖然理論上可以消除穩態時的功率振蕩,但由于計算誤差和檢測元件精度限制,實際工作中還是存在一定的功率波動,且算法較復雜,需要較多的計算時間,因而對外部環境變化的響應速度變慢。
本文針對光伏陣列的輸出特性,提出了一種新的MPPT控制策略,該策略結合了固定電壓法和基于功率預測的變步長擾動觀測法,固定電壓法用于系統啟動,使系統快速運行于近似的MPP,基于功率預測的變步長擾動觀測法用于實現系統的MPPT,具有跟蹤速度快、功率振蕩小、日照劇烈變化不會發生誤判等優點。
1 光伏電池建模
光伏電池是利用半導體的光生伏特效應制成的。單體光伏電池的輸出電壓在標準照度(1 000 W/m2)下只有0.5 V左右,常見的單體電池的輸出功率一般在1 W左右。單體電池除了容量小以外,其機械強度也較差。在實際應用中一般將單體電池經串、并聯嚴密封裝成組件,或進一步將光伏電池組件串、并聯連接成光伏陣列。光伏電池的實際工作等效電路如圖1所示[4]。
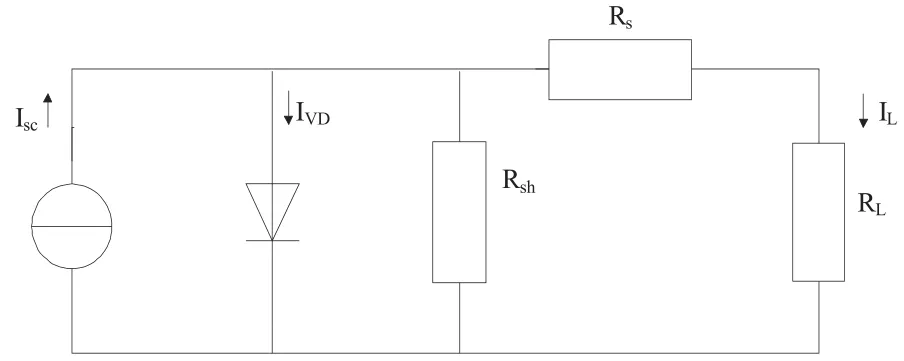
圖1光伏電池等效電路
圖1 中,sc代表光子在光伏電池中激發的電流,這個量取決于光照強度、電池的面積和本體的溫度,sc與光照強度成正比;VD為通過pn結的總擴散電流,方向與sc相反;sh為光伏電池旁漏電阻;s為光伏電池串聯電阻;L為光伏電池負載電阻;L為負載電流。
一般光伏電池,串聯電阻很小,并聯電阻很大,所以在進行理想計算時可以忽略不計,可得負載電流的理想表達式:

2 光伏電池的輸出特性曲線
光伏電池輸出電流如式(1),輸出功率的函數為:
qUL
P=IscUL?ID0UL(eAKT?1)(2)
圖2為外部環境穩定情況下光伏陣列輸出電流、輸出功率與輸出電壓的關系曲線。由圖2可知在一定的光照和溫度條件下,光伏陣列輸出功率特性曲線是以最大功率點為極值的一個單峰值曲線,在最大功率點電壓處輸出最大功率,在最大功率點左側輸出功率隨電壓升高而增大,在最大功率點右側輸出功率隨電壓升高而減小。
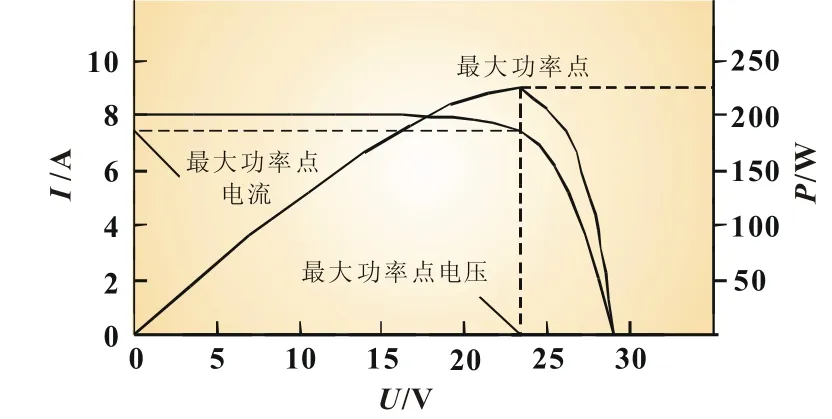
圖2 光伏陣列輸出電流、輸出功率特性曲線
3 光伏電池的最大功率點跟蹤
光伏電池的輸出特性會受外界光照、工作結溫、負載狀態的變化而變化,具有強烈的非線性特征,但在特定的光照強度和環境溫度下,光伏電池存在一個最大功率輸出點。要提高光伏發電系統的整體效率,一個重要途徑就是實時變換系統負載特性,進行最大功率點跟蹤。
傳統的擾動觀測法采用定步長擾動,在跟蹤最大功率點時存在動態響應速度和穩態精度相矛盾的問題。根據光伏電池輸出功率-電壓特性曲線可知,在整個電壓范圍內,輸出功率曲線為一單峰曲線,且在遠離MPP時,功率變化較快,跟蹤步長應適當增大,以提高跟蹤速度;在MPP附近時,功率變化較慢,跟蹤步長應適當減小,以提高跟蹤精度。同時當光照發生突變時,光伏電池的工作點會從一條特性曲線轉移到另一條特性曲線上,若根據單一的特性曲線進行控制就有可能發生誤判,導致跟蹤方向錯誤,嚴重時還會導致電壓、功率崩潰。
針對以上提到的兩點,本文對傳統的擾動觀測法進行兩點改進,采用變化的步長取代定步長擾動;同時,為避免光照突變時發生誤判,可以針對多條特性曲線的情形進行功率預測。
同一輻照度下P-U特性曲線上電壓擾動前的工作點功率可以通過預測算法而獲得,利用這個預測的功率以及同一輻照度下P-U特性曲線上電壓擾動后檢測到的實際工作點功率,就可以實現基于擾動觀測法的MPPT,有效克服誤判,這是基于功率預測的擾動觀測法的基本思路。下面分析其基本算法。當采樣頻率足夠高時,可以假定一個采樣周期中輻照度的變化速率恒定。令時刻電壓Uk處工作點測得的功率為P(k),此時不對參考電壓加擾動,而是在KT時刻后半個采樣周期的(+1/2)時刻增加一次功率采樣,令測得的功率為P(k+1/2),則可以得到基于一個采樣周期的預測功率p'(k)為:

在(+1/2)時刻使參考電壓增加△U,并令在(+1)時刻測得電壓+1處的功率為P(k+1),P(k+1)與P'(k)理論上是同一光照強度下P-U特性曲線上電壓擾動前后的兩個工作點功率,故利用(k+1)時刻的檢測功率P(k+1)以及時刻的預測功率P'(k)進行基于擾動觀測法的MPPT是不存在誤判問題的。
變步長算法采用最優梯度法[5]確定擾動步長,公式為:

本文將基于功率預測的擾動觀測法與變步長的擾動觀測法相結合,不僅能克服誤判,還能解決MPPT跟蹤速度和精度間的矛盾,最大限度抑制系統的振蕩。
經分析,設計基于功率預測的變步長擾動觀測法的流程圖,如圖3所示。
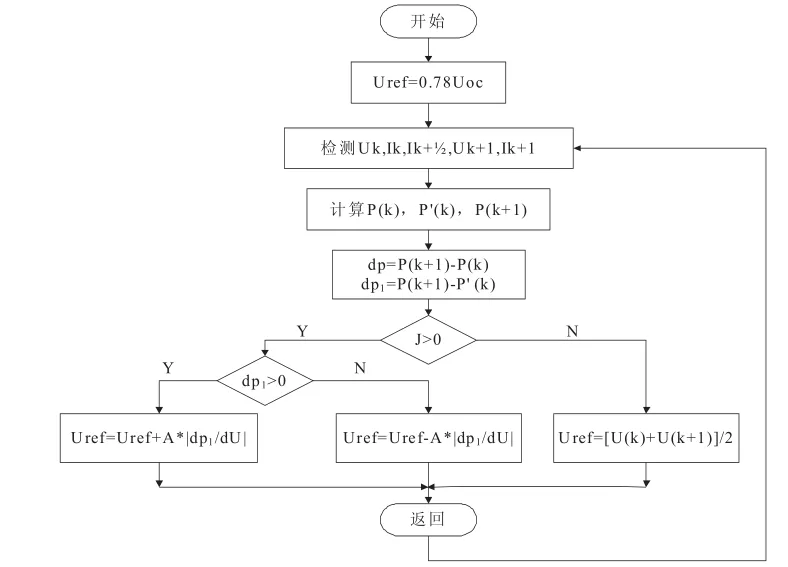
圖3 基于功率預測的變步長擾動觀測法流程
系統采用固定電壓法啟動,使系統快速運行于MPP附近,再利用基于功率預測的變步長擾動觀測法實現最大功率的快速、準確跟蹤。
4 仿真研究
為了驗證本文提出的MPPT控制算法的有效性,利用Matlab/Simulink軟件對傳統擾動觀測法和本文提出的基于功率預測的變步長算法進行了仿真分析。主電路選擇Boost DC/DC變換電路,光伏陣列的模型按照以下參數搭建:標準測試條件下(光伏電池設定溫度25℃,初始光照1 000 W/m2)最大功率170 W,最大功率點電壓和電流分別為23 V和7.4 A,開路電壓29 V,短路電流8 A。
圖4和圖5分別為傳統擾動觀測法和基于功率預測的變步長擾動觀測法在進行MPPT控制時的波形。由圖可見,擾動觀測法在系統啟動后0.09 s跟蹤到最大功率點,本文算法在0.02 s前就已經達到穩態,由此看出本文算法跟蹤速度更快;0.2 s時外界光照突變為1 500 W/m2,0.4 s時光照突變為1 200 W/m2,可見本文提出的方法消除了光照突變跟蹤初期的誤判,變步長的算法有效減輕了系統在MPP的功率振蕩,提高了系統的跟蹤精度,可見基于功率預測的變步長算法在動態跟蹤速度和穩態跟蹤精度上都有較大優勢。
5 結論
本文針對光伏電池輸出特性,分析了傳統擾動觀測法的原理和不足,在此基礎上提出了一種新的控制算法,該算法結合了固定電壓法和基于功率預測的變步長擾動觀測法,前者實現系統快速啟動,后者將基于功率預測的擾動觀測法與變步長的擾動觀測法相結合,不僅能克服光照突變時的誤判,還能解決MPPT跟蹤速度和精度間的矛盾,最大限度抑制系統的振蕩。通過仿真驗證可知,該控制算法在外界光照強度發生突變時,能夠避免誤判,迅速、精確地跟蹤到MPP,減少了振蕩現象的產生,提高了系統的工作效率。
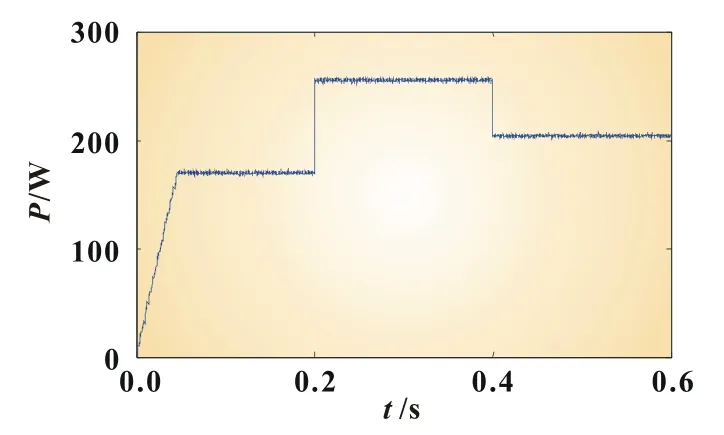
圖4 傳統擾動觀測法功率波形
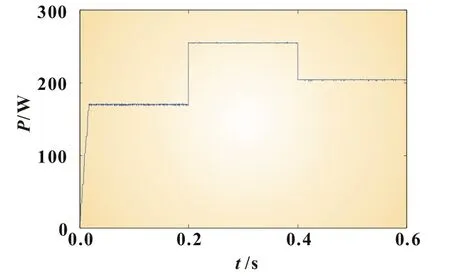
圖5 基于功率預測的變步長擾動觀測法功率波形
[1]周林,武劍,栗秋華,等.光伏陣列最大功率點跟蹤控制方法綜述[J].高電壓技術,2008,34(6):1145-1154.
[2]張超,何湘寧.短路電流結合擾動觀察法在光伏發電最大功率點跟蹤控制中的應用[J].中國電機工程學報,2006,26(20):98-102.
[3]焦陽,宋強,劉文華.基于改進MPPT算法的光伏并網系統控制策略[J].電力自動化設備,2010,30(12):92-96.
[4]張興,曹仁賢.太陽能光伏并網發電及其逆變控制[M].北京:機械工業出版社,2010:41-44.
[5]趙為.太陽能光伏并網發電系統的研究[D].合肥:合肥工業大學,2003.
Research of kind of variable step size perturbation and observation MPPT based on power prediction
WU Lei,GAO Xing-lin
Considering the output characteristic of photovoltaic array,the principle and shortcomings of the traditional P&O method was analyzed,and an improved maximum power point tracking(MPPT)algorithm was presented,which was the combination of Constant Voltage algorithm and variable step size P&O method based on power prediction. The results of proposed algorithm and traditional algorithms were made by simulating with MATLAB/Simulink program.The simulation results show that the MPPT response speed and accuracy could be greatly improved by the proposed scheme.Moreover,it was more suitable for practical operating conditions due to the strong capability of anti-interference.
MPPT;constant voltage algorithm;power prediction;variable step size;P&O
TM 914
A
1002-087 X(2015)03-0527-02

2014-08-14
2012年省產學研創新項目(BY2012069)
吳雷(1962—),男,江蘇省人,碩士,副教授,主要研究方向為電力電子、電力傳動、感應加熱電源。