基于雙權重聚合的立體匹配算法
2015-06-13 07:30:52朱程濤姚靜嫻
吉林大學學報(工學版) 2015年4期
關鍵詞:方法
何 凱,朱程濤,姚靜嫻
(天津大學 電子信息工程學院,天津300072)
0 引 言
立體匹配算法主要是通過建立一個能量代價函數,通過此能量代價函數最小化來估計像素點視差值[1]。由視差圖得到深度信息,再將深度信息用于三維場景的重建。立體匹配算法的實質就是一個最優化求解問題,通過建立合理的能量函數,增加一些約束,采用最優化理論的方法進行求解,這也是目前病態問題常用的求解方法。
目前國內外學者已經提出了許多立體匹配方法,如基于局部約束的立體匹配算法[2-5]以及全局約束的立體匹配算法[6-7]。局部立體匹配算法是利用興趣點周圍的局部信息進行計算,涉及信息量較少,相應的計算復雜度較低;其優點是算法速度快、效率高;缺點是其對噪聲較敏感,對低紋理區域、深度不連續區域效果不理想。
本文將所有鄰近像素的匹配代價與權值相結合,得到參考像素的聚合匹配代價;并采用文獻[8]中提出的SWS 方法進行快速匹配代價聚合減少計算復雜度。同時,在視差精煉階段,提出了基于聚合匹配代價平滑的精煉策略。
1 傳統局部立體匹配算法
傳統算法通常采用AD、AG、NCC[9]等匹配代價:
式中:x、y 分別為像素點P 所在的列數、行數;d為視差;IL、IR分別代表左、右圖;?IL、?IR分別代表左、右兩圖的梯度圖。
代價聚合則通常采用窗口聚合,即

式中:N(x,y)為參考像素(x,y)的鄰近區域;ek(i,j,d)代表某種類型的匹配代價;wk(i,j)為相應的權重。
2 本文算法
提出了一種新的權重匹配代價聚合方法,以及基于該匹配代價的視差精煉方法。
2.1 匹配代價計算方法
式中:n 代表圖像R、G、B 三個通道;?xILn、?yILn分別代表左圖R、G、B 通道的水平、豎直方向梯度圖;?xIRn、?yIRn分別代表右圖R、G、B 通道的水平、豎直方向梯度圖;TD、TG是截斷閾值。與傳統方法采用灰度信息做匹配代價相比,本文采用3個通道的亮度信息,以提高匹配效率。
2.2 匹配代價聚合
為了提高匹配精度,必須采用一定的權重匹配代價方法進行聚合[10-12]。本文將參考像素周圍所有像素的匹配代價加以適當權值,以得到參考像素的聚合匹配代價。
灰渣粒徑 60~100 目、投放量 2.5g·L-1、溫度 20℃,改變pH值,按1.3試驗方法對染液進行吸附處理。實驗結果見圖3。
權重的設置根據雙邊濾波的原則,即與參考像素亮度越相近的像素,TAD 聚合代價權重Wix、Wjy設置得越大;與參考像素梯度值越相近的像素,TAG 聚合代價權重Tix、Tjy設置得越大。此外,雙邊濾波中權重還考慮到空間信息,即離參考像素越近權重越大;任意一點像素到參考像素的聚合代價權重可以分解為橫向和縱向的權重乘積,即總權重是隨著空間距離的增大而減小。
本文將兩種不同聚合匹配代價的權值分開來考慮,即TAD 匹配代價的聚合權重依賴于亮度信息的差異,TAG 匹配代價的聚合權重依賴于梯度信息的差異,這樣的聚合權重設置更能反映不同權值對不同匹配代價的影響,且權重的設置使用R、G、B 三個通道的信息,較使用單一通道信息更為可靠。
類似地,Wjy、Tjy可分別參考Wix、Tix。匹配代價聚合的計算相當于二維卷積,為了減少計算復雜度,可根據文獻[8]提出的降維算法,利用SWS(Successive weighted summation)將每個二維卷積運算分解為4個一維卷積,分別為匹配代價由左至右卷積、由右至左卷積、由上至下卷積、由下至上卷積。
2.3 視差精煉
視差值的計算一般采用WTA(Winner takes all)策略,即為

式中:S(d)是搜索視差集合,即S(d)={0,1,…,dmax}。
得到初始視差圖后,利用左右一致性檢測方法檢測視差異常值點,不滿足式(12)的點即為視差異常值點。

式中:Drl(x,y)是以左圖為參考圖得到的視差圖;Dlr(x,y)是以右圖為參考圖得到的視差圖。通常絕大多數異常點均為背景遮擋點,因此采用簡單的遮擋點視差填充方法[3]即可。
每個像素點對應的視差值均為離散的整數,將這些離散值直接用于三維重建會導致重建場景表面出現斷層,因此,必須對每個像素點聚合匹配代價函數進行平滑,以得到連續變化的視差值。
本文提出了一種新的平滑函數,采用式(13)所示的雙曲線函數對視差值進行平滑。

k1,k2,k3∈R 且k1>0,k2>0
根據雙曲線函數的性質可知:f(d)在d1*處取得極小值。由上式可解得:
3 實驗結果及分析
3.1 測試圖實驗結果
為了測試本文算法的匹配精度,選用Middlebury網站提供的測試圖進行測試。各參數設 置 分 別 為{λ,TD,TG,α,β}={0.4,25,50,35,25},利用不同算法獲得視差圖如圖1所示。
利用不同算法獲得視差圖的誤匹配率如表1所示。其中,SNCC、RTCensus、AdaptWeight代表傳統局部立體匹配算法,FeatureGC、AdaptingBP為全局立體匹配算法。誤差閾值取為0.5。
從圖1中可以看出,本文算法在低紋理區域能夠獲得更好的效果,如‘Venus’黑色板區域、‘Teddy’屋頂區域等;由于在視差精煉階段采用了視差平滑策略,由4張測試圖的視差圖均可看出,視差過渡平滑,有效減少了視差圖中“波紋”現象,整體視差圖的匹配效果較好。
從表1 中可以看出,SNCC 算法在圖‘Tsukuba’視差邊緣處(如燈的邊界和支架處)誤匹配率較高;雖然在圖‘Cones’非遮擋區域誤匹配率低于本文算法,但平均誤匹配率明顯高于本文算法。RTCensus算法雖然在圖‘Cones’非遮擋區域誤匹配率比本文算法略低,但在其視差邊緣處誤匹配率高于本文算法,RTCensus算法平均誤匹配率為14.4%。
從表1中可以看出,與采用固定窗口聚合匹配代價的AdaptWeight算法相比,本文算法采用的權重聚合匹配代價,在視差邊緣處及非遮擋區域的匹配性能均優于傳統算法,平均誤匹配率最低。
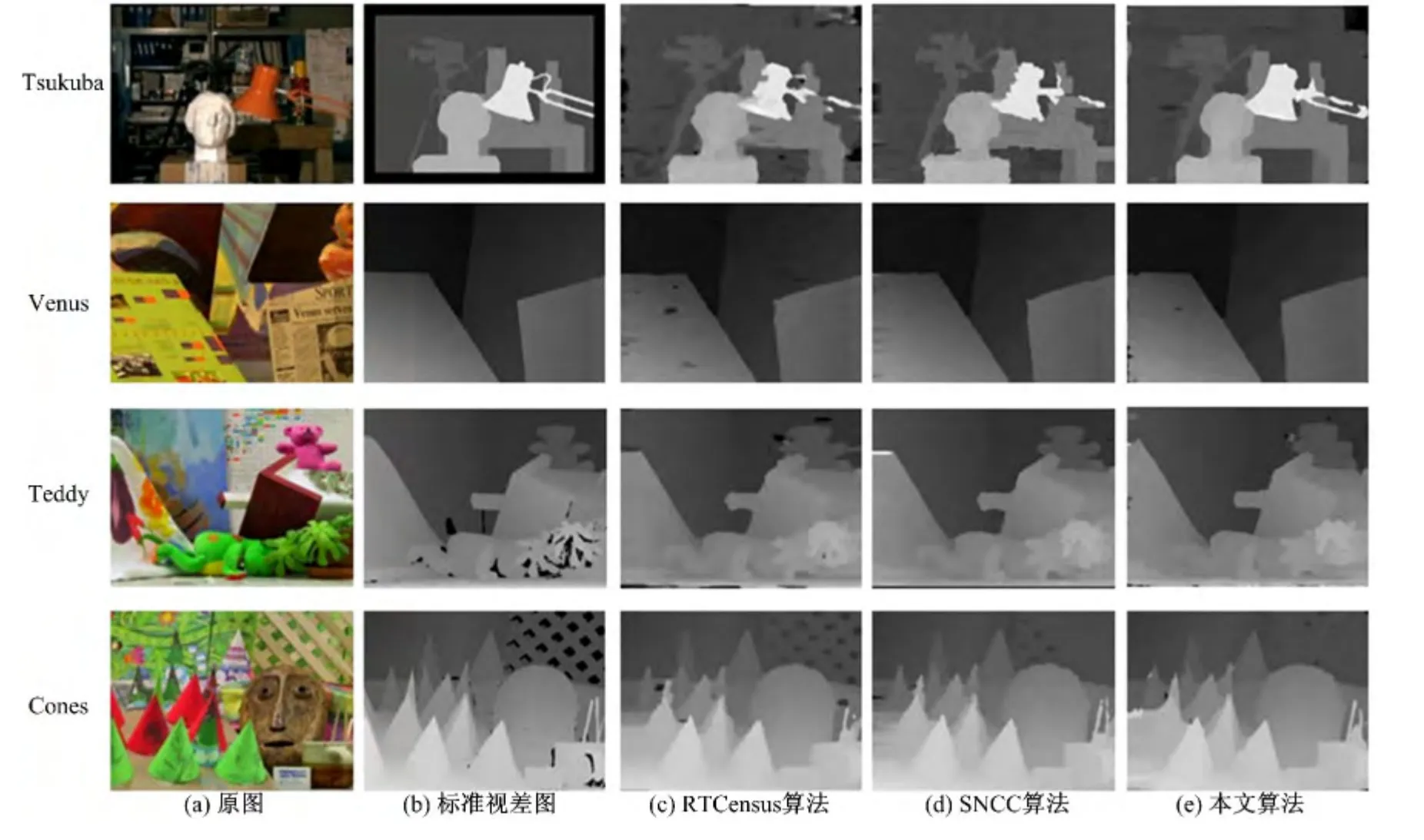
圖1 視差圖效果比較Fig.1 Comparison of disparity maps results
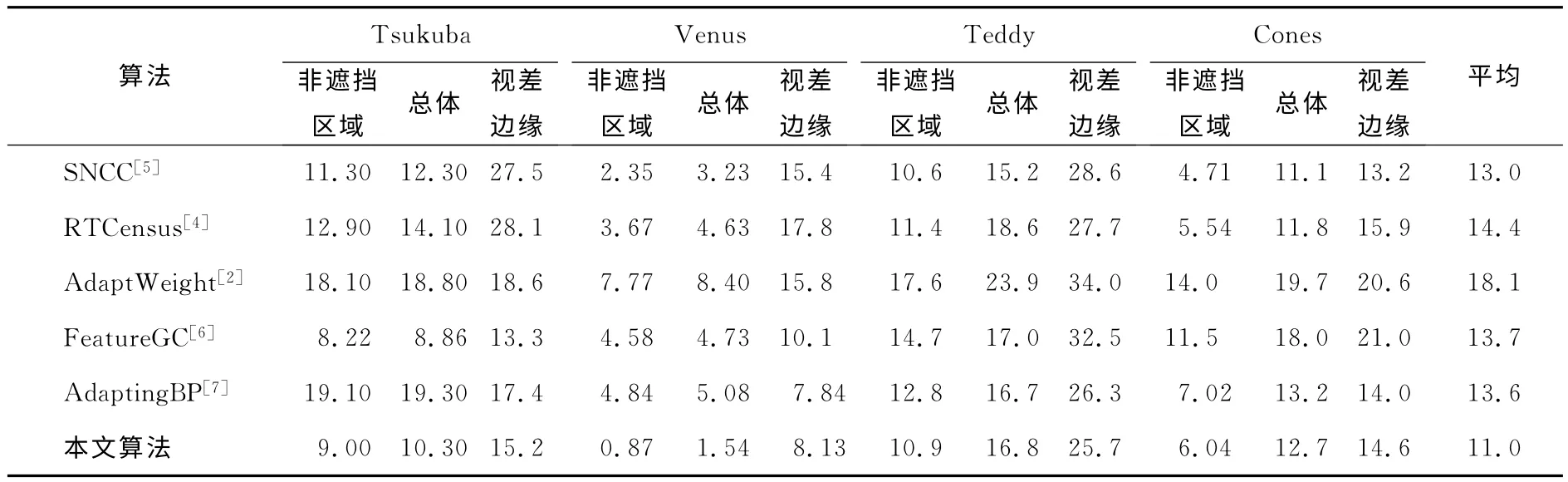
表1 幾種算法的誤匹配率比較Table 1 Comparison of error rate of different algorithms %
相比較于計算復雜度較高的全局立體匹配算法,如:FeatureGC、AdaptingBP,本文算法也有較大的優勢。兩種算法分別基于圖割理論和置信度傳播理論進行分割,采用平面擬合的方法進行視差精煉。FeatureGC算法對圖‘Tsukuba’前景與背景分割的效果好,匹配性能稍好于本文算法,但圖‘Cones’平均誤匹配率高達11.5%,本文算法只有6.04%。而AdaptingBP算法誤匹配率明顯過高;究其原因是由于分割與平面擬合的精度不夠,影響了整體視差精度。
3.2 實際場景的立體匹配與三維重建
實際場景立體匹配效果如圖2所示。從圖2可以看出,本文算法在畫作邊框附近處誤匹配點明顯少于SNCC,在樹枝及花的位置處,本文算法的誤匹配點也少于SNCC 算法;從三維重建結果可以看出,利用SNCC 算法進行重建,畫作邊框有較多的突刺現象,在畫作樹枝及花的位置處突刺也比較多,而本文算法則較好地避免了這一現象,較為真實的重建了畫作的立體信息。
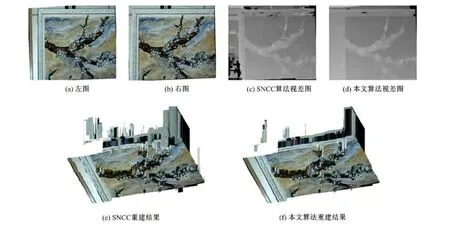
圖2 畫作的匹配與重建Fig.2 Stereo matching and reconstruction for picture
4 結束語
提出了一種基于雙權重聚合的立體匹配算法,利用雙邊濾波器的特性設置匹配代價聚合的權重獲得每一點的聚合匹配代價,并將匹配代價聚合過程分離開來,利用不同聚合權重進行匹配代價聚合。在視差精煉階段,采用雙曲線函數對聚合匹配代價平滑,得到稠密視差圖。通過對比一些優秀的局部立體匹配算法和全局立體匹配算法,證明了本文算法優越性。
[1]Sharstein D,Szeliski R.A taxonomy and evaluation of dense two-frame stereo correspondence algorithms[J].International Journal on Computer Vision,2002,47(1-3):7-42.
[2]Yoon K J,Kweon S.Adaptive support-weight approach for correspondence search[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(4):650-656.
[3]Min D,Lu J,Do M.Joint histogram based cost aggregation for stereo matching[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,35(10):2539-2545.
[4]Humenberger M,Zinner C,Weber M,et al.A fast stereo matching algorithm suitable for embedded real-time systems[J].Computer Vision and Image Understanding,2010,114(11):1180-1202.
[5]Einecke N,Eggert J.A two-stage correlation method for stereoscopic depth estimation[C]∥International Conference on Digital Image Computing:Techniques and Applications,Sydney,New South Wales,2010:227-234.
[6]Saygili Gorkem,van der Maaten Laurens,Hendriks Emile A.Feature-based stereo matching using graph-cuts[C]∥Conference on Asian Society of Cardiovascular Imaging,Hong Kong,2011:14-15.
[7]Klaus A,Sormann M,Karner K.Segment-based stereo matching using belief propagation and a selfadapting dissimilarity measure[C]∥The 18th International Conference on Pattern Recognition,Hong Kong,2006:15-18.
[8]Cigla Cevahir,Alatan A Aydin.Information permeability for stereo matching[J].Signal Processing on Image Communication,2013,28(9):1072-1088.
[9]Mattoccia S,Tombari F,Di Stefano L.Fast fullsearch equivalent template matching by enhanced bounded correlation[J].IEEE Transactions on Image Processing,2008,17(4):528-538.
[10]Hosni A,Rhemann C,Bleyer M,et al.Fast costvolume filtering for visual correspondence and beyond[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,35(2):504-511.
[11]趙巖,劉靜,陳賀新,等.用于單視加深度視頻編碼的快速立體匹配算法[J].吉林大學學報:工學版,2012,42(4):1032-1036.Zhao Yan,Liu Jing,Chen He-xin,et al.Fast stereo matching algorithm used in stereo video coding based on video plus depth[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(4):1032-1036.
[12]門朝光,邊繼龍,李香.基于限制搜索空間的快速立體匹配方法[J].吉林大學學報:工學版,2012,42(2):423-428.Men Chao-guang,Bian Ji-long,Li Xiang.Fast stereo matching algorithm based on limited search space[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(2):423-428.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
