基于靈敏度分析的EPS轉(zhuǎn)向性能試驗客觀評價指標(biāo)
2015-06-13 07:30:24張澤星陳國迎宗長富
吉林大學(xué)學(xué)報(工學(xué)版) 2015年4期
張澤星,陳國迎,宗長富
(吉林大學(xué) 汽車仿真與控制國家重點實驗,長春130022)
0 引 言
EPS 系統(tǒng)對汽車轉(zhuǎn)向性能有顯著影響[1]。高速回正性能試驗車速為最高車速的70%,側(cè)向加速度達(dá)到4m/s2,轉(zhuǎn)向半徑達(dá)到400m,但由于國內(nèi)沒有專用的試驗場地,只能在寬度為50~100m 的機(jī)場跑道上進(jìn)行試驗[2],故EPS車輛進(jìn)行高速回正性能調(diào)試試驗存在難度。EPS 系統(tǒng)參數(shù)與車輛轉(zhuǎn)向性能之間存在不明確的耦合關(guān)系,參數(shù)的調(diào)試與標(biāo)定多依賴調(diào)試者的主觀經(jīng)驗,調(diào)試周期長且效果一般。
為了掌握EPS系統(tǒng)與轉(zhuǎn)向性能的影響關(guān)系,國內(nèi)外學(xué)者在EPS系統(tǒng)匹配和優(yōu)化方面進(jìn)行了大量研究工作。美國TRW 公司對中心區(qū)進(jìn)行量化并建立置信區(qū)間模型,從而確定轉(zhuǎn)向系統(tǒng)剛度與中心區(qū)性能的影響關(guān)系[3]。日本本田公司通過人-車系統(tǒng)模型進(jìn)行高速換道仿真實驗研究汽車高速小角度轉(zhuǎn)向時的操縱性能[4]。伊朗汽車工業(yè)集團(tuán)對EPS助力矩的輸出位置對轉(zhuǎn)向性能的影響進(jìn)行了分析,為EPS系統(tǒng)的結(jié)構(gòu)設(shè)計和布置提供了理論依據(jù)[5]。在國內(nèi),吉林大學(xué)對EPS系統(tǒng)的控制參數(shù)和機(jī)械參數(shù)對轉(zhuǎn)向性能的影響進(jìn)行了研究,確定了系統(tǒng)參數(shù)的匹配方法和原則[6]。北京理工大學(xué)對EPS助力特性曲線與轉(zhuǎn)向性能的關(guān)系進(jìn)行了分析,確定了EPS助力特性曲線的匹配方法[7]。
文獻(xiàn)[8]基于相關(guān)分析理論,以8輛不同車型的試驗數(shù)據(jù)為基礎(chǔ),應(yīng)用統(tǒng)計學(xué)規(guī)律,研究了高速回正性能試驗的替代試驗,其中殘留橫擺角速度、橫擺角速度總方差、穩(wěn)定時間、橫擺角速度自然頻率和相對阻尼系數(shù)都有合適的替代指標(biāo)。而橫擺角速度超調(diào)量與中心區(qū)正弦試驗指標(biāo)“0 N·m時的側(cè)向加速度”相關(guān)系數(shù)為-0.88,由于表現(xiàn)的物理意義不同,無法替代。但兩個指標(biāo)所表現(xiàn)出的高負(fù)相關(guān)性將為EPS車輛高速回正性能調(diào)試提供理論指導(dǎo)方向。
本文以文獻(xiàn)[8]中結(jié)論為基礎(chǔ),通過仿真手段,應(yīng)用靈敏度分析理論分析EPS系統(tǒng)參數(shù)與兩個試驗指標(biāo)的關(guān)系,并結(jié)合動力學(xué)分析解釋兩個指標(biāo)的變化規(guī)律,最后以某EPS試驗車為平臺,進(jìn)行EPS系統(tǒng)參數(shù)3個水平值下的實車試驗。
1 聯(lián)合仿真模型及靈敏度分析方案
1.1 聯(lián)合仿真模型
仿真研究EPS系統(tǒng)參數(shù)與車輛轉(zhuǎn)向性能的關(guān)系。基于Matlab/Simulink 搭建EPS 系統(tǒng)模型,車輛模型采用Carsim 商用軟件,從而建立EPS系統(tǒng)與車輛模型聯(lián)合仿真平臺,如圖1 所示。
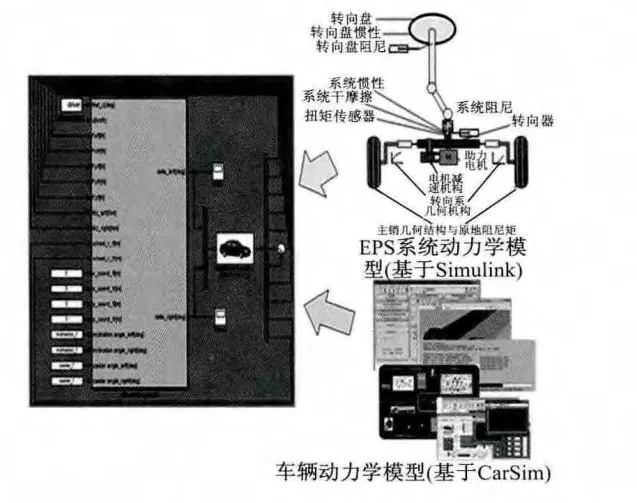
圖1 EPS系統(tǒng)模型與Carsim 聯(lián)合仿真平臺Fig.1 Co-simulink platform for EPS system model and Carsim model
EPS系統(tǒng)模型輸入為左右車輪的輪胎力和車輪定位參數(shù),輸出為左右車輪的轉(zhuǎn)向角。Carsim 車輛模型的輸入為左右轉(zhuǎn)向車輪的轉(zhuǎn)向角,輸出為輪胎力和車輪定位參數(shù)。通過調(diào)整EPS系統(tǒng)參數(shù),進(jìn)行Simulink 與Carsim 的聯(lián)合仿真。
1.2 靈敏度分析方案
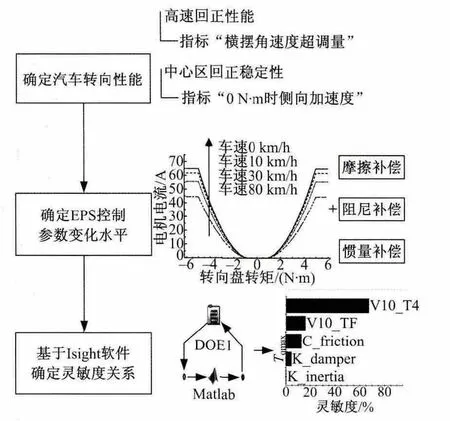
圖2 靈敏度分析方案Fig.2 Scheme of sensitivity analysis
靈敏度分析方案如圖2所示。首先轉(zhuǎn)向性能評價指標(biāo)為高速回正性能指標(biāo)“橫擺角速度超調(diào)量”及中心區(qū)回正穩(wěn)定性能評價指標(biāo)“0N·m 時側(cè)向加速度”。其次,確定進(jìn)行靈敏度分析的EPS系統(tǒng)參數(shù)包括助力特性參數(shù)和系統(tǒng)補(bǔ)償參數(shù),并定義系統(tǒng)參數(shù)的3個變化水平值。最后,基于Isight軟件設(shè)計EPS系統(tǒng)參數(shù)的正交試驗表,并通過Matlab 與Carsim 聯(lián)合模型進(jìn)行仿真試驗,計算每組正交試驗下的指標(biāo)值,然后采用極差分析法確定EPS系統(tǒng)參數(shù)與轉(zhuǎn)向性能的靈敏度關(guān)系。
2 系統(tǒng)參數(shù)及水平值確定
EPS系統(tǒng)參數(shù)包括助力特性參數(shù)和系統(tǒng)補(bǔ)償參數(shù)。靈敏度分析時,根據(jù)調(diào)試經(jīng)驗和實車測量確定系統(tǒng)參數(shù)實際取值范圍,每個參數(shù)取3個變化水平值,定義為基準(zhǔn)值、偏小水平值、偏大水平值。
2.1 助力特性參數(shù)水平值確定
助力曲線為多點折線擬合曲線特性,助力特征點的確定參照文獻(xiàn)[9],助力死區(qū)和助力飽和區(qū)臨界轉(zhuǎn)向盤力矩分別為1N·m 和5N·m。隨著助力特征點數(shù)量的增多,助力特性會逐步接近理想的曲線型助力效果,但會導(dǎo)致調(diào)試工作量增大。對于本文的靈敏度分析方法,不同的特征點數(shù)量只會導(dǎo)致程序運算量存在差異,故將助力特性曲線轉(zhuǎn)矩間隔定義為1N·m。既能獲得近似于曲線型的助力特性,又能減少調(diào)試工作量,提高靈敏度分析時的程序運算效率。
通過統(tǒng)計5款以上A 級對標(biāo)車的操縱穩(wěn)定性試驗數(shù)據(jù),轉(zhuǎn)向輕便區(qū)和強(qiáng)路感區(qū)的分界值是3N·m。Ⅰ區(qū)為助力死區(qū)(0~1N·m),Ⅱ區(qū)為強(qiáng)路感區(qū)(1~3N·m),Ⅲ區(qū)為轉(zhuǎn)向輕便區(qū)(3~5 N·m),5 N·m 以上為助力飽和區(qū),如圖3 所示。
在進(jìn)行高速回正性能試驗時,轉(zhuǎn)向盤轉(zhuǎn)矩基本為0N·m,故定義100km/h車速下的助力曲線上的助力死區(qū)臨界轉(zhuǎn)向盤轉(zhuǎn)矩值為靈敏度分析參數(shù)。根據(jù)EPS調(diào)試經(jīng)驗,助力死區(qū)的臨界轉(zhuǎn)向盤轉(zhuǎn)矩基準(zhǔn)值設(shè)定為1N·m,另外兩個水平值分別設(shè)定為0.5N·m 和1.5N·m。
在進(jìn)行中心區(qū)連續(xù)正弦試驗時,轉(zhuǎn)向盤力矩不超過4N·m,故只需考察100km/h下助力死區(qū)Ⅰ和強(qiáng)路感區(qū)Ⅱ的助力特性參數(shù)。根據(jù)各參數(shù)的實際取值范圍,定義各特性參數(shù)水平值如表1所示。
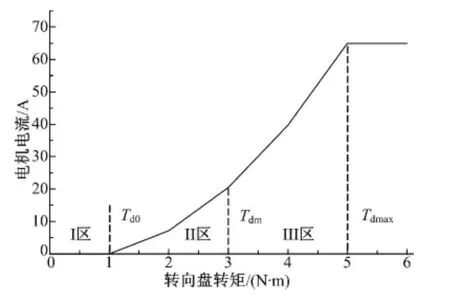
圖3 EPS助力特性曲線區(qū)域Fig.3 Areas for the power characteristic curve of EPS
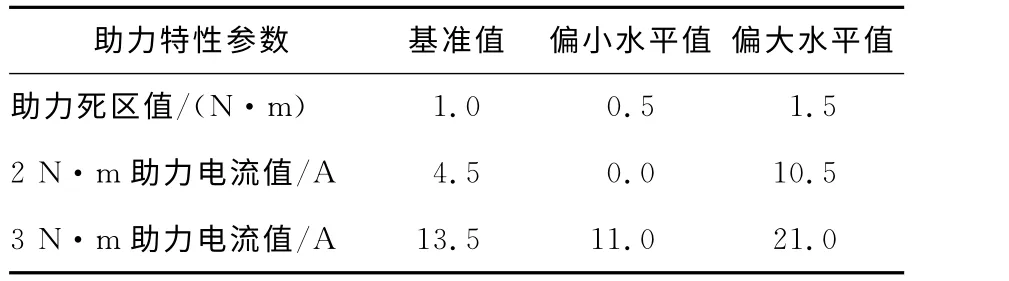
表1 助力特性參數(shù)水平值Table 1 Levels of power characteristic parameters
2.2 系統(tǒng)補(bǔ)償參數(shù)水平值確定
EPS系統(tǒng)補(bǔ)償參數(shù)包括慣量補(bǔ)償系數(shù)、阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流。系數(shù)值以完全克服轉(zhuǎn)向系統(tǒng)的慣性力矩、阻尼阻力矩和摩擦阻力矩為依據(jù)來確定,并取最大值。通過在K&C試驗臺上對某EPS試驗車的多次測量,得到轉(zhuǎn)向系統(tǒng)的慣性力矩、阻尼阻力矩和摩擦阻力矩的統(tǒng)計值分別為0.107kg·m2、0.29N·m(rad/s)、3.62N·m。然后根據(jù)實車調(diào)試經(jīng)驗在變化范圍內(nèi)定義了系統(tǒng)補(bǔ)償參數(shù)的基準(zhǔn)值,經(jīng)過計算得到各個系統(tǒng)補(bǔ)償參數(shù)的偏小水平值和偏大水平值,如表2所示。
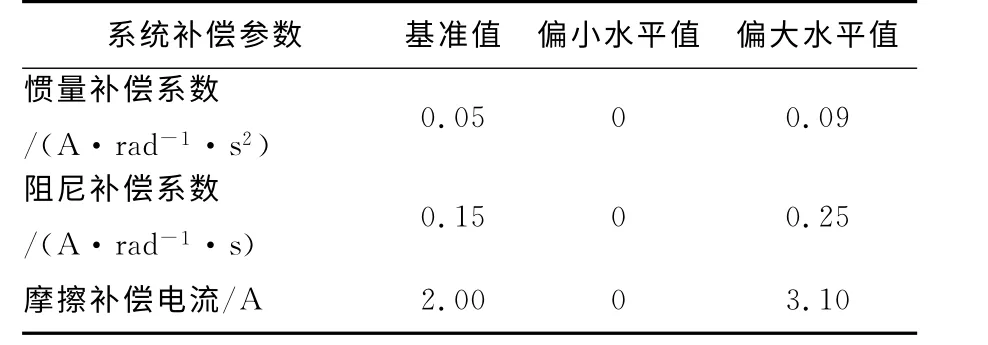
表2 系統(tǒng)補(bǔ)償參數(shù)水平值Table 2 Levels of system compensation parameters
3 靈敏度分析
3.1 Isight軟件
Isight軟件旨在解決在產(chǎn)品設(shè)計中,設(shè)計參數(shù)多、運行環(huán)境復(fù)雜、性能指標(biāo)相互制約等問題,能夠快速分析出參數(shù)的敏感性,并能進(jìn)行品質(zhì)優(yōu)化[10]。它能代替工程人員處理重復(fù)性強(qiáng)、易出錯的數(shù)字處理及設(shè)計工作[11]。
3.2 正交試驗設(shè)計
正交試驗設(shè)計通過正交表的方式考慮多因素、多水平的影響,應(yīng)用統(tǒng)計學(xué)方法如極差分析方法、方差分析方法等對試驗結(jié)果進(jìn)行分析[12-14]。
本文采用正交設(shè)計極差分析方法,對EPS系統(tǒng)參數(shù)與轉(zhuǎn)向性能的靈敏度進(jìn)行分析。該靈敏度關(guān)系體現(xiàn)的是系統(tǒng)參數(shù)變化對轉(zhuǎn)向性能指標(biāo)的相對影響關(guān)系,而非絕對關(guān)系。但該方法能使各參數(shù)、各水平分布均勻,試驗次數(shù)減少,從而有效地提高試驗效率。同時在每組正交系統(tǒng)參數(shù)下,易于對靈敏度分析結(jié)果進(jìn)行實車試驗驗證。
正交試驗正交表定義為LN(QM),N 為試驗次數(shù),M 為系統(tǒng)參數(shù)數(shù)量,Q 為每個參數(shù)的水平值數(shù)量。以3個系統(tǒng)參數(shù)為例,每個系統(tǒng)參數(shù)取3個變化水平值,正交試驗設(shè)計正交表為L9(33),如表3所示。V1、V2、V3為3個變化水平值,V2為基準(zhǔn)值,V1為偏小水平值,V3為偏大水平值。
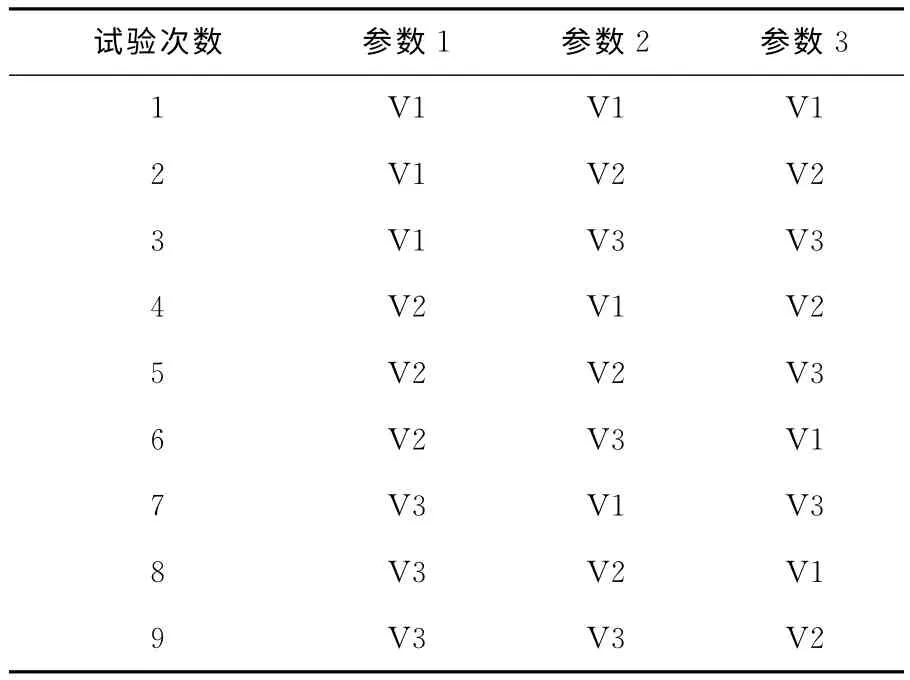
表3 L9(33)正交表設(shè)計Table 3 Orthogonal design table for L9(33)
3.3 靈敏度分析結(jié)果
EPS系統(tǒng)參數(shù)與“橫擺角速度超調(diào)量”、“0 N·m時的側(cè)向加速度”的靈敏度關(guān)系如圖4、圖5所示。
由圖4可知,阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流與橫擺角速度超調(diào)量具有較大的靈敏度關(guān)系,助力死區(qū)的轉(zhuǎn)向盤力矩和慣性補(bǔ)償系數(shù)具有相對較弱的敏感性,為次要的影響參數(shù)。
由圖5可知,0N·m 時側(cè)向加速度與橫擺角速度超調(diào)量具有相同的影響參數(shù),助力死區(qū)為次要影響參數(shù),慣量補(bǔ)償系數(shù)的敏感度幾乎為零,可以忽略。
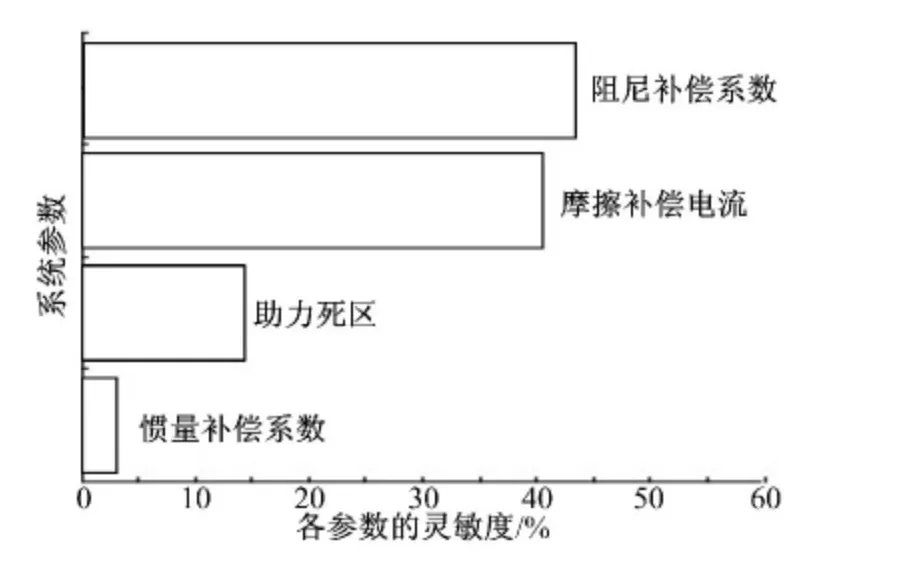
圖4 系統(tǒng)參數(shù)與橫擺角速度超調(diào)量的靈敏度關(guān)系Fig.4 Sensitivity relationship between system parameters and yaw rate overshoot
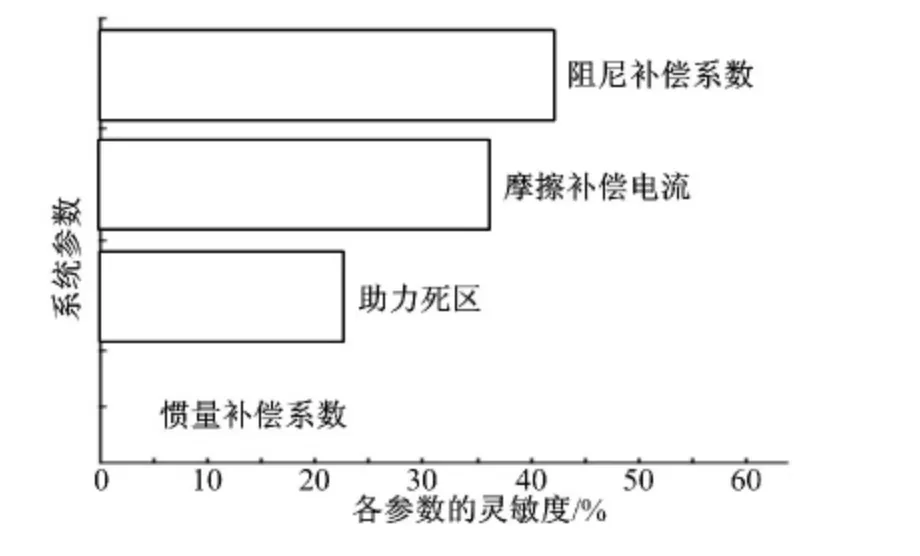
圖5 系統(tǒng)參數(shù)與0N·m 時側(cè)向加速度的靈敏度關(guān)系Fig.5 Sensitivity relationship between system parameters and lateral acceleration at 0N·m
本文取對轉(zhuǎn)向性能影響力較高的前兩位影響參數(shù),即阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流。對比圖4和圖5兩幅圖可知,兩個指標(biāo)與系統(tǒng)參數(shù)之間的敏感性程度相似。兩個指標(biāo)的相關(guān)性系數(shù)為-0.88,說明兩個指標(biāo)具有較大的負(fù)相關(guān)性,即調(diào)試系統(tǒng)參數(shù)使指標(biāo)“橫擺角速度超調(diào)量”減小,而指標(biāo)“0N·m時側(cè)向加速度”會增大。
從系統(tǒng)動力學(xué)角度分析以上影響關(guān)系如下:
(1)0N·m 時側(cè)向加速度表征了轉(zhuǎn)向盤轉(zhuǎn)向中間位置過程中,轉(zhuǎn)向盤力矩為零,即回正力矩等于系統(tǒng)阻力矩時的側(cè)向加速度值。回正力矩包括系統(tǒng)結(jié)構(gòu)回正力矩和系統(tǒng)補(bǔ)償回正力矩,系統(tǒng)阻力矩包括摩擦阻力矩、阻尼阻力矩和慣性阻力矩,在中心區(qū)附近,由于轉(zhuǎn)向盤角加速度較小,慣性阻力矩基本為零,摩擦阻力矩基本恒定,阻尼阻力矩隨轉(zhuǎn)向盤轉(zhuǎn)速降低而減小。相同角速度下,當(dāng)增大阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流時,系統(tǒng)補(bǔ)償回正力矩變大,摩擦阻力矩和阻尼阻力矩基本不變,故只有系統(tǒng)結(jié)構(gòu)回正力矩值更小,即更接近轉(zhuǎn)向盤中間位置時,轉(zhuǎn)向系統(tǒng)回正力矩值才會收斂并等于系統(tǒng)阻力矩。即轉(zhuǎn)向盤力矩零點對應(yīng)的位置更接近轉(zhuǎn)向盤中間位置,該點的側(cè)向加速度值也趨于零。
(2)橫擺角速度超調(diào)量表征了轉(zhuǎn)向盤轉(zhuǎn)至并穩(wěn)定到中間位置過程中,橫擺角速度的最大震蕩程度。高速回正試驗中,轉(zhuǎn)向盤力矩為零,回正力矩克服系統(tǒng)阻力矩使轉(zhuǎn)向盤回到中間位置。回正力矩成分同樣包括系統(tǒng)結(jié)構(gòu)回正力矩和系統(tǒng)補(bǔ)償回正力矩。當(dāng)增大阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流時,系統(tǒng)補(bǔ)償回正力矩增大,導(dǎo)致轉(zhuǎn)向盤回正角速度變大。轉(zhuǎn)向盤轉(zhuǎn)過中間位置后,系統(tǒng)結(jié)構(gòu)回正力矩與系統(tǒng)阻力矩同向,并克服系統(tǒng)補(bǔ)償回正力矩使轉(zhuǎn)向盤角速度減小。當(dāng)角速度等于零時,轉(zhuǎn)向盤開始轉(zhuǎn)向中間位置。故增大的系統(tǒng)補(bǔ)償回正力矩,需要更大的系統(tǒng)結(jié)構(gòu)回正力矩克服補(bǔ)償回正力矩及慣性,結(jié)構(gòu)回正力矩值隨轉(zhuǎn)向盤至中間位置的距離增加而增加,從而導(dǎo)致超調(diào)量增大。
4 實車試驗
4.1 試驗設(shè)計
基于永磁同步電機(jī)EPS開發(fā)原型控制器,并基于國內(nèi)某品牌車開發(fā)了EPS試驗車。以該車為試驗平臺,改變阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流值,先后取基準(zhǔn)值、偏小變化水平值、偏大變化水平值進(jìn)行高速回正性能試驗和中心區(qū)正弦試驗。
高速回正試驗工況:以車速100km/h 直線行駛,轉(zhuǎn)動轉(zhuǎn)向盤使側(cè)向加速度達(dá)到2 m/s2,穩(wěn)定數(shù)秒后撒手回正。記錄橫擺角速度時間歷程曲線,如圖6所示。經(jīng)數(shù)據(jù)處理程序得到指標(biāo)“橫擺角速度超調(diào)量”值,如表4所示。

表4 高速回正性能試驗指標(biāo)Table 4 Indice of high-speed returnability test %
中心區(qū)正弦試驗工況:以車速100km/h 直線行駛,轉(zhuǎn)向盤轉(zhuǎn)動頻率0.2(100%±10%)Hz,幅值變化符合正弦曲線,峰值使側(cè)向加速度為2 m/s2。記錄數(shù)據(jù)轉(zhuǎn)向盤轉(zhuǎn)矩和側(cè)向加速度,并畫出轉(zhuǎn)向盤轉(zhuǎn)矩相對側(cè)向加速度曲線,如圖5所示。通過數(shù)據(jù)處理程序得到指標(biāo)“0N·m 時側(cè)向加速度”的偏大水平值、偏小水平值、基準(zhǔn)值分別為0.52、1.04、0.68m/s2。
4.2 試驗結(jié)果分析
由圖6(a)(b)中左右方向橫擺角速度的時間歷程曲線可知,在高速回正狀態(tài)下,當(dāng)阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流取值依次為偏小水平值、基準(zhǔn)值、偏大水平值時,橫擺角速度超調(diào)量有明顯增大的趨勢。通過實驗數(shù)據(jù)處理得到的指標(biāo)“橫擺角速度超調(diào)量”也證明了橫擺角速度超調(diào)量對系統(tǒng)的兩個參數(shù)變化的響應(yīng)趨勢。
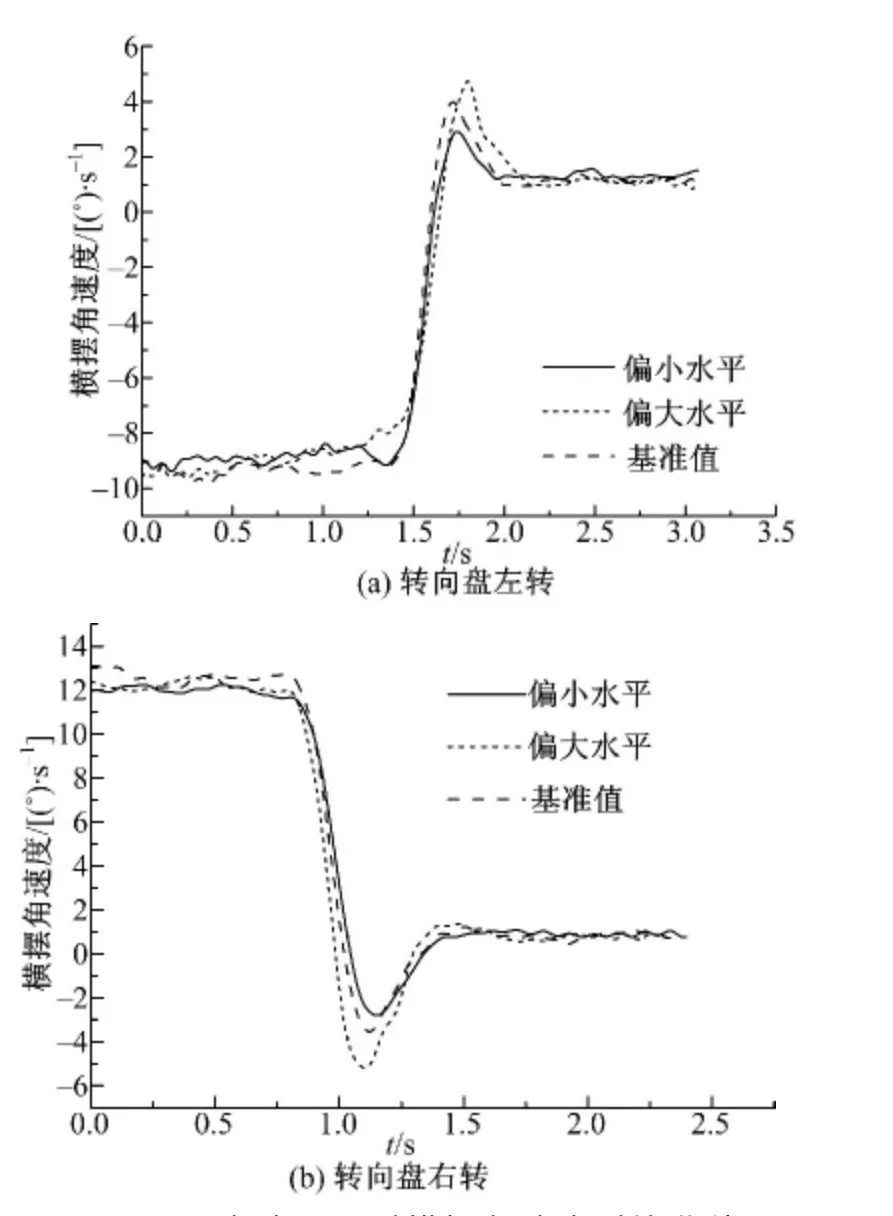
圖6 高速回正時橫擺角速度對比曲線Fig.6 Correlation curve of yaw rate on high-speed returnability condition
由圖7中轉(zhuǎn)向盤轉(zhuǎn)矩與側(cè)向加速度曲線可知,當(dāng)阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流的取值增大時,曲線與橫軸交點的絕對值有明顯變小的趨勢,即轉(zhuǎn)向盤轉(zhuǎn)矩為0N·m 時所對應(yīng)的的側(cè)向加速度減小,轉(zhuǎn)向盤也就越接近中間位置。4.1 節(jié)中指標(biāo)“0N·m 時側(cè)向加速度”也證明了該指標(biāo)對阻尼補(bǔ)償系數(shù)和摩擦補(bǔ)償電流的響應(yīng)趨勢。
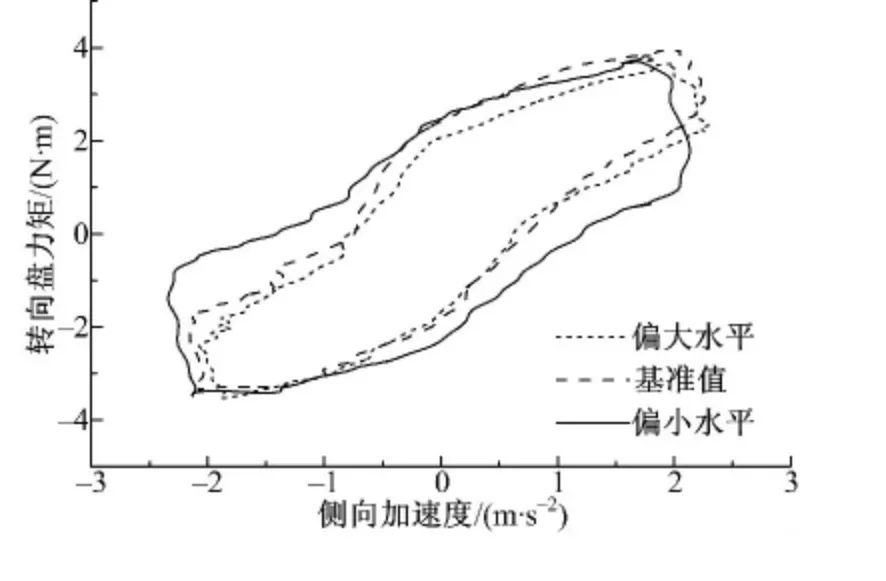
圖7 中心區(qū)轉(zhuǎn)向盤轉(zhuǎn)矩與側(cè)向加速度關(guān)系曲線Fig.7 On-center correlation curve of steering-wheel torque and lateral acceleration
由于實車試驗中存在著噪聲等干擾,故試驗曲線會存在一定的失真,沒有反應(yīng)出真實的響應(yīng)量。但對比曲線及指標(biāo)給出的變化規(guī)律驗證了系統(tǒng)參數(shù)的改變與性能指標(biāo)之間的響應(yīng)特性,以及兩個指標(biāo)之間的相關(guān)性關(guān)系。
5 結(jié) 論
(1)基于實車調(diào)試經(jīng)驗和實車測量計算系統(tǒng)參數(shù)的實際取值范圍,定義系統(tǒng)參數(shù)的基準(zhǔn)值、偏小水平值、偏大水平值,能夠更貼近實車應(yīng)用,并且很好地反應(yīng)實車調(diào)試時的變化規(guī)律。
(2)基于正交設(shè)計極差分析法進(jìn)行正交試驗,能夠通過安排較少的試驗次數(shù)對多參數(shù)、多水平進(jìn)行平均分配,提高了試驗效率。同時從相關(guān)性分析及動力學(xué)分析兩方面對靈敏度分析結(jié)果進(jìn)行解釋,更全面地揭示了兩個指標(biāo)之間的統(tǒng)計學(xué)變化規(guī)律,以及導(dǎo)致這種現(xiàn)象的內(nèi)在原因。
(3)以EPS試驗車為平臺,設(shè)計了針對高速回正性能和中心區(qū)回正穩(wěn)定性的實車試驗,從實際應(yīng)用的角度證實了靈敏度分析和動力分析的結(jié)論是正確的。
[1]向丹.電動助力與主動轉(zhuǎn)向組合系統(tǒng)的控制研究[D].廣東:華南理工大學(xué)機(jī)械與汽車工程學(xué)院,2012.Xiang Dan.Study on the combined system of EPS and AFS[D].Guangdong:School of Mechanical and Automotive Engineering,South China University of Technology,2012.
[2]郭孔輝.汽車操縱動力學(xué)原理[M].江蘇:江蘇科學(xué)技術(shù)出版社,2011:37-40.
[3]Peppler S A,Johnson J R,Williams D E.Steering system effects on on-center handling and performance[C]∥SAE Paper,1999-01-3765.
[4]Yoneda A,Miyoshi T,Shimizu Y.Cogging torque target and design of motor for EPS[C]∥SAE Paper,2006-01-1320.
[5]Mohammadi H,Kazemi R.Simulation of different types of electric power assisted steering(EPS)to investigate applied torque positions'effects[C]∥SAE Paper,2003-01-0585.
[6]朱海.電動助力轉(zhuǎn)向匹配分析及性能評價研究[D].長春:吉林大學(xué)汽車工程學(xué)院,2004.Zhu Hai.Study on performance evaluation and matching analysis for EPS[D].Changchun:College of Automotive Engineering,Jilin University,2004.
[7]Shi Pei-ji,Zhang Qun,Lin Cheng.Electric power steering system matching and hardware-in-the-loop simulation of economical cars[C]∥International Conference on Electrical Machines and Systems(ICEM),Beijing:IEEE,2011:1-4.
[8]王長青.乘用車中心區(qū)操縱穩(wěn)定性客觀評價指標(biāo)體系研究[D].長春:吉林大學(xué)汽車工程學(xué)院,2012.Wang Chang-qing.Study on objective evaluation index system of on-center handling for passenger car[D].Changchun:College of Automotive and Engineering,Jilin University,2012.
[9]施國標(biāo).電動助力轉(zhuǎn)向匹配分析及性能評價研究[D].長春:吉林大學(xué)汽車工程學(xué)院,2004.Shi Guo-biao.Analysis on matching EPS and study on performance evaluation[D].Changchun:College of Automotive Engineering,Jilin University,2004.
[10]李玉玲.體驗精湛的技術(shù)和服務(wù)-采埃孚(ZF)德國之旅[J].汽車與配件(技術(shù)與市場),2013(7):18-28.Li Yu-ling.Experience the superb technology and service-(ZF)German visit[J].Automobile and Parts(Technology and Market),2013(7):18-28.
[11]任利.基于Isight的多學(xué)科設(shè)計優(yōu)化平臺的研究與實現(xiàn)[D].青島:山東科技大學(xué)機(jī)械電子工程學(xué)院,2006.Ren Li.Study and implementation of multidisciplinary design optimization platform based on Isight software[D].Qingdao:School of Mechanical and Electronic Engineering,Shandong University of Science and Technology,2006.
[12]Yuan Xiao-h(huán)ong,Chen Chang-sheng,Xia Kai,et al.Optimization and simulation of vehicle powertrain system based on orthogonal experimental design[C]∥Asia-Pacific Power and Energy Engineering Conference(APPEEC),Wuhan,IEEE,2011:1-4.
[13]He Q S,Liu X N,Xiao S F.Application of orthogonal experimental design on reliability and sensitivity analysis[J].Advanced Materials Research,2011,211:651-655.
[14]Li Yong-xian,Sun Ming-li.An algorithm of robust design:orthogonal optimum design and variance ratio analysis[C]∥International Technology and Innovation Conference,Xi'an,2009:1-5.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
科學(xué)大眾(2021年9期)2021-07-16 07:02:40
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
