一種管道密閉性雙車(chē)檢測(cè)定位方法
2015-06-12 12:32:09李宗睿劉嘉博孫東輝王喜斌
自動(dòng)化儀表 2015年6期
李宗睿 侯 艷 劉嘉博 孫東輝 王喜斌
(北華航天工業(yè)學(xué)院電子與控制工程學(xué)院,河北 廊坊 065000)
一種管道密閉性雙車(chē)檢測(cè)定位方法
李宗睿 侯 艷 劉嘉博 孫東輝 王喜斌
(北華航天工業(yè)學(xué)院電子與控制工程學(xué)院,河北 廊坊 065000)
為解決流體輸送管道投產(chǎn)前的密閉性檢測(cè)問(wèn)題,提出了一種基于無(wú)線通信技術(shù)和雙檢測(cè)定位方法的解決方案。該方案利用無(wú)線通信模塊控制管道中兩臺(tái)檢測(cè)車(chē)的行進(jìn)動(dòng)作,同時(shí)利用搭載在檢測(cè)車(chē)上的氣壓檢測(cè)模塊完成管道中密封性的測(cè)試。當(dāng)出現(xiàn)氣壓值突變時(shí),檢測(cè)車(chē)進(jìn)行實(shí)時(shí)定位并通過(guò)無(wú)線方式將檢測(cè)結(jié)果發(fā)送至管道一端的終端模塊進(jìn)行顯示和記錄。試驗(yàn)表明,該方案定位準(zhǔn)確,且可實(shí)時(shí)顯示檢測(cè)結(jié)果,在流體輸送管道密閉性檢測(cè)過(guò)程中具有很高的應(yīng)用價(jià)值。
雙車(chē)檢測(cè) 無(wú)線通信 實(shí)時(shí)定位 漏檢車(chē) 定位車(chē)
0 引言
管道輸送是目前工業(yè)領(lǐng)域較為簡(jiǎn)單、直接的流體輸送方式,因其成本低廉、維護(hù)簡(jiǎn)單、安全性高、供給穩(wěn)定等特點(diǎn),被廣泛應(yīng)用在各種工業(yè)生產(chǎn)過(guò)程中。而密閉性良好的管道是流體正常輸送的前提條件,否則會(huì)影響生產(chǎn)、污染環(huán)境,甚至威脅人類(lèi)生命[1]。但是在生產(chǎn)過(guò)程中,管道有可能因?yàn)楣に噯?wèn)題出現(xiàn)密閉性不好的問(wèn)題,特別是長(zhǎng)距離管道需要經(jīng)過(guò)焊接以延長(zhǎng)其長(zhǎng)度,而焊接過(guò)程更容易使接口處出現(xiàn)漏洞或細(xì)縫[2]。所以在管道鋪設(shè)完畢后,必須經(jīng)過(guò)一系列的檢測(cè),只有密閉性達(dá)到要求的管道才能投入到生產(chǎn)中。傳統(tǒng)的管道密封性檢測(cè)常用的方法是通過(guò)將水或氣體注入管道,然后通過(guò)各種間接測(cè)漏方式對(duì)泄漏點(diǎn)進(jìn)行查找。常用的方法包括壓力梯度法、次聲波檢測(cè)法、負(fù)壓波檢測(cè)法等[3-6]。但以上傳統(tǒng)檢測(cè)方法都由于各種原因限制,應(yīng)用較少。針對(duì)以上問(wèn)題,本文重點(diǎn)研究了一種新型雙車(chē)檢測(cè)定位方法,利用無(wú)線通信技術(shù)完成管道裂紋的檢測(cè)與定位,并將檢測(cè)結(jié)果實(shí)時(shí)發(fā)送到系統(tǒng)終端,輔助管理人員方便精確地找到管道泄漏點(diǎn)。
1 系統(tǒng)組成
整體雙車(chē)漏檢系統(tǒng)由漏檢車(chē)、定位車(chē)以及終端單元組成,具體如圖1所示。
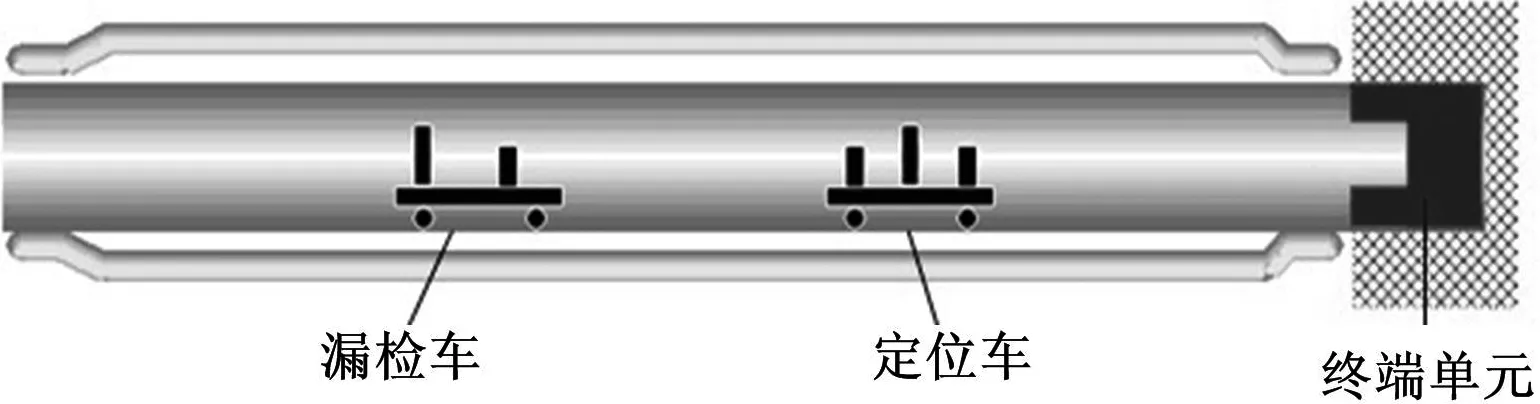
圖1 雙車(chē)漏檢定位系統(tǒng)組成示意圖Fig.1 Schematic diagram of the composition of two-vehicle leak inspection and positioning system
1.1 漏檢車(chē)組成及工作原理
漏檢車(chē)完成對(duì)管道密封性的初步檢測(cè),并與定位車(chē)完成無(wú)線通信,實(shí)現(xiàn)雙車(chē)行進(jìn)控制,其內(nèi)部組成如圖2所示。在工作過(guò)程中,漏檢車(chē)自帶氣壓傳感器檢測(cè)管道內(nèi)部氣體絕對(duì)壓強(qiáng)。如壓強(qiáng)未有明顯變化,則小車(chē)?yán)^續(xù)向前行進(jìn);如漏檢車(chē)檢測(cè)到氣壓變化明顯,有泄漏可能時(shí),則停止前行,并通過(guò)無(wú)線通信模塊告知后方定位車(chē)降低前行速度,詳細(xì)檢測(cè)泄漏點(diǎn)位置。
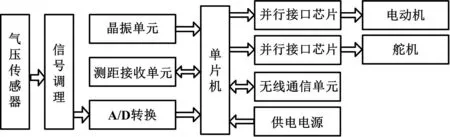
圖2 漏檢車(chē)組成框圖Fig.2 Block diagram of the composition of leak inspection vehicle
1.2 定位車(chē)組成及工作原理
定位車(chē)完成與漏檢車(chē)的行進(jìn)狀態(tài)通信,并通過(guò)氣壓傳感器進(jìn)行泄漏點(diǎn)二次檢測(cè),準(zhǔn)確定位漏點(diǎn)位置;同時(shí),還可將漏電信息以無(wú)線通信方式傳送至管道終端。定位車(chē)內(nèi)部組成如圖3所示。
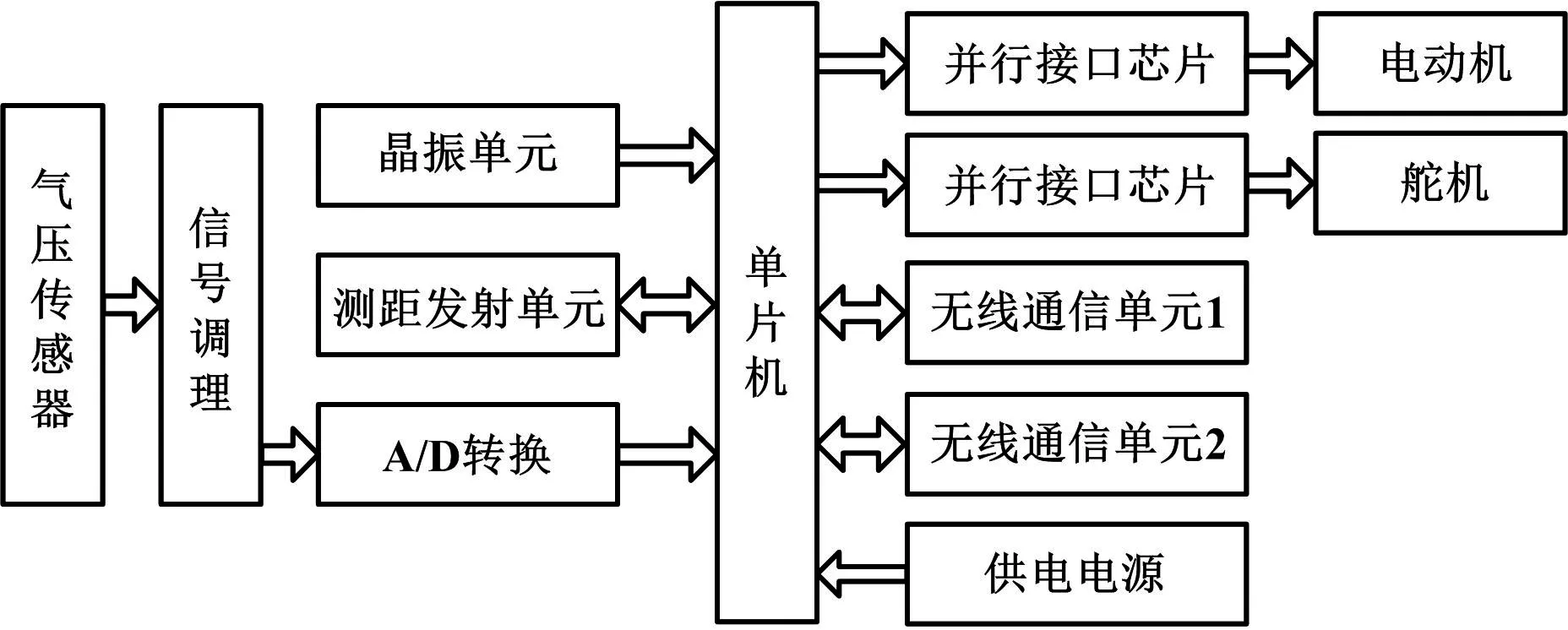
圖3 定位車(chē)組成框圖Fig.3 Block diagram of the composition of positioning vehicle
在工作過(guò)程中,定位車(chē)接收到漏檢車(chē)的行進(jìn)控制信號(hào)后,降低車(chē)速進(jìn)行氣壓精確檢測(cè),如果接觸到漏檢車(chē)后仍未發(fā)現(xiàn)壓強(qiáng)明顯變化點(diǎn),則認(rèn)為漏檢車(chē)進(jìn)行了一次誤測(cè)試,則雙車(chē)重新啟動(dòng)前進(jìn)。此過(guò)程中漏檢車(chē)先啟動(dòng),定位車(chē)?yán)密?chē)體前部的測(cè)距裝置確定雙車(chē)距離滿足要求,隨后啟動(dòng)前進(jìn)。如果測(cè)試到管線某點(diǎn)壓強(qiáng)變化最為明顯,則確認(rèn)該位置為疑似泄漏點(diǎn),定位車(chē)上的無(wú)線通信單元在微控制器作用下發(fā)出一個(gè)標(biāo)志信息,以通知終端單元此時(shí)檢測(cè)到一個(gè)漏點(diǎn)。
1.3 終端單元組成及工作原理
終端單元的作用是接收到所述定位車(chē)發(fā)送的信號(hào)后,通過(guò)定位車(chē)運(yùn)行速度以及運(yùn)行時(shí)間計(jì)算出該漏點(diǎn)位置,并通過(guò)顯示器將此位置信息進(jìn)行顯示。終端單元內(nèi)部組成如圖4所示。
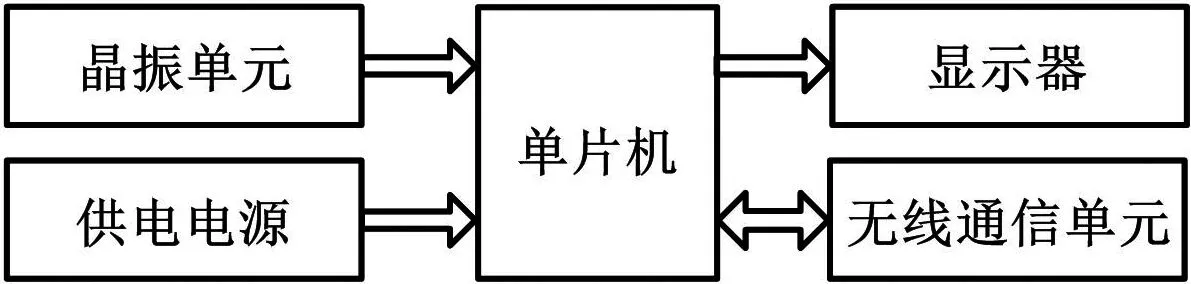
圖4 終端單元組成框圖Fig.4 Block diagram of the composition of terminal unit
2 系統(tǒng)硬件設(shè)計(jì)
雙車(chē)漏檢定位系統(tǒng)以單片機(jī)為控制、計(jì)算核心,以無(wú)線通信方式完成雙車(chē)行進(jìn)控制信號(hào)傳輸,通過(guò)終端單元顯示漏電檢測(cè)位置結(jié)果。系統(tǒng)所采用的硬件單元如下所述。
① 單片機(jī)模塊
系統(tǒng)漏檢車(chē)、定位車(chē)以及終端單元均以MSP430F1232單片機(jī)為控制核心。該單片機(jī)是由TI公司推出的功能強(qiáng)大的超低功耗16位混合信號(hào)處理器,其以低功耗、強(qiáng)大的處理能力、豐富的片上外圍模塊、方便高效的開(kāi)發(fā)方式等特點(diǎn),被廣泛應(yīng)用于便攜式儀表、智能傳感器、實(shí)用檢測(cè)儀器、電機(jī)控制等領(lǐng)域。
② 無(wú)線通信及測(cè)距收發(fā)模塊
采用NRF24L01收發(fā)一體無(wú)線傳輸模塊,負(fù)責(zé)完成漏檢車(chē)、定位車(chē)以及終端單元之間的數(shù)據(jù)通信,同時(shí)還可完成漏檢車(chē)與定位車(chē)之間的測(cè)距任務(wù)。該模塊可采用與單片機(jī)相同的3.3 V電源直接供電,在2.4 Mbit/s的傳輸速率下保證低功耗的特點(diǎn),適用于電池供電的單片機(jī)應(yīng)用系統(tǒng)。
③ 電機(jī)模塊
采用ASLONG-JGB37-520小功率直流電機(jī),完成漏檢車(chē)和定位車(chē)的動(dòng)力提供。
④ 舵機(jī)模塊
采用輝盛MG996R大扭力標(biāo)準(zhǔn)舵機(jī),負(fù)責(zé)完成漏檢車(chē)和定位車(chē)的轉(zhuǎn)向驅(qū)動(dòng),使得雙車(chē)在管道中的行進(jìn)更加穩(wěn)定。
⑤ 電源模塊
采用MP2303ADN電源管理芯片,可將車(chē)載12 V電源降壓為系統(tǒng)所需的3.3 V電源,為單片機(jī)模塊及無(wú)線通信模塊供電。
通過(guò)以上模塊的搭建,整個(gè)系統(tǒng)具備性?xún)r(jià)比高、功耗低等特點(diǎn),適用于長(zhǎng)時(shí)間野外環(huán)境應(yīng)用。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件包括漏檢車(chē)控制程序、定位車(chē)控制程序機(jī)終端單元控制程序三部分。
3.1 漏檢車(chē)工作流程
測(cè)試過(guò)程中依次將漏檢車(chē)及定位車(chē)放入測(cè)試管道并保持管道密封。漏檢車(chē)以預(yù)定速度開(kāi)始向前行進(jìn),并接收定位車(chē)發(fā)送的測(cè)距信號(hào)。當(dāng)測(cè)距信息滿足系統(tǒng)預(yù)定要求后,利用無(wú)線通信模塊發(fā)送定位車(chē)前進(jìn)命令。在前進(jìn)過(guò)程中,漏檢車(chē)上的氣壓傳感器進(jìn)行快速檢測(cè),實(shí)時(shí)感應(yīng)管道內(nèi)當(dāng)前位置氣壓信息,正常狀態(tài)下管道內(nèi)氣壓呈緩慢線性變化,說(shuō)明當(dāng)前位置管道密封性良好。若出現(xiàn)氣壓突變,說(shuō)明該位置存在泄漏可能,此時(shí)漏檢車(chē)停車(chē),并發(fā)送“精確檢測(cè)”控制命令給定位車(chē),命令定位車(chē)降低車(chē)速進(jìn)行仔細(xì)檢測(cè)。漏檢車(chē)工作流程圖如圖5所示。
圖5 漏檢車(chē)工作流程圖Fig.5 Work process of the leak inspection vehicle
3.2 定位車(chē)工作流程
定位車(chē)工作流程圖如圖6所示。
圖6 定位車(chē)工作流程圖Fig.6 Work process of the positioning vehicle
定位車(chē)進(jìn)入管道后不斷發(fā)射測(cè)距信號(hào)。當(dāng)測(cè)距滿足要求并接收到漏檢車(chē)發(fā)送的前進(jìn)命令后,定位車(chē)按照預(yù)定速度前進(jìn),前進(jìn)速度與漏檢車(chē)相同。當(dāng)定位車(chē)接收到漏檢車(chē)發(fā)送的“精確檢測(cè)”控制命令后,降低前進(jìn)速度并通過(guò)無(wú)線通信模塊2向終端單元發(fā)送標(biāo)志信息1,利用其自帶氣壓傳感器仔細(xì)檢測(cè)氣壓變化。如果在某點(diǎn)檢測(cè)到氣壓突變,則立即停車(chē)并通過(guò)無(wú)線通信模塊2向終端單元發(fā)送標(biāo)志信息2,表示該位置為漏點(diǎn)位置。如果定位車(chē)與漏檢車(chē)相遇后,仍未檢測(cè)到漏點(diǎn)位置,則認(rèn)為漏檢車(chē)進(jìn)行了一次誤檢測(cè),發(fā)送重啟命令,雙車(chē)重新啟動(dòng)向前行進(jìn)并在定位車(chē)啟動(dòng)后向終端單元發(fā)送標(biāo)志信息3。
3.3 終端單元工作流程
終端單元利用無(wú)線通信模塊與定位車(chē)進(jìn)行通信,并記錄定位車(chē)行進(jìn)速度及行進(jìn)時(shí)間。當(dāng)終端單元接收到標(biāo)志信息1時(shí),表示定位車(chē)當(dāng)前以低速前進(jìn)。當(dāng)終端單元接收到標(biāo)志信息2時(shí),表示定位車(chē)確定漏點(diǎn)位置,終端單元的微處理器將按照公式S=v1t1+v2t2計(jì)算出漏點(diǎn)與管道入口的距離值,并通過(guò)顯示器顯示該位置信息。當(dāng)終端單元接收到標(biāo)志信息3時(shí),表示定位車(chē)重新啟動(dòng)并按照正常速度前進(jìn)。終端單元工作流程圖如圖7所示。
圖7 終端單元工作流程圖Fig.7 Work process of the terminal unit
4 結(jié)束語(yǔ)
綜上所述,本文所述的一種管道密封性雙車(chē)定位檢測(cè)方法,其最大優(yōu)勢(shì)就在于其利用高性?xún)r(jià)比傳感器及單片機(jī)完成對(duì)管道密封性的檢測(cè)。同時(shí),雙車(chē)檢測(cè)方法可以使定位更加直接而且準(zhǔn)確,可以將疑似泄漏點(diǎn)的位置直觀地顯示在顯示器上而不需要進(jìn)行復(fù)雜的數(shù)據(jù)處理,從而提高了管道檢測(cè)的效率。
[1] 汪磊,談圖,曹振松,等.便攜式天然氣泄漏遙感探測(cè)的研究[J].光譜學(xué)與光譜分析,2010,30(8):2192-2195.
[2] 馮繼忠,孫明森,張思,等.長(zhǎng)輸管道檢測(cè)技術(shù)探討[J].長(zhǎng)江大學(xué)學(xué)報(bào),2012,9(9):70-72.
[3] 杜永軍,時(shí)婷婷,郭鳳,等.基于RFID輸油管道泄漏檢測(cè)技術(shù)的研究與探討[J].科學(xué)技術(shù)與工程,2010,10(9):2155-2159.
[4] 龍媛媛,柳言國(guó),楊為剛,等.埋地管道泄漏檢測(cè)技術(shù)的綜合應(yīng)用[J].石油化工腐蝕與防護(hù),2009,26(2):47-49.
[5] 許勝利,劉桂香,趙翔,等.機(jī)動(dòng)輸油管線泄露監(jiān)測(cè)技術(shù)[J].后勤工程學(xué)院學(xué)報(bào),2012,28(3):44-50.
[6] 胡炎興.輸油管線泄露監(jiān)測(cè)技術(shù)研究[J].管道技術(shù)與設(shè)備,2011(3):19-21.
Two-vehicle Leak Inspection and Positioning Method for Airtightness of Pipeline
In order to solve the problems in airtightness inspection for pre-production of fluid transportation pipelines, the solution based on wireless communication technology and twofold inspection plus positioning method is proposed. With this method, the movements of two inspection vehicles are controlled by wireless communication module, and the test of airtightness in pipeline is conducted by using the air pressure detection module equipped on the inspection vehicles. When abrupt change of air pressure occurs, positioning is accomplished in real time by the inspection vehicle, and the result is sent to the terminal module at the end of the pipeline for display and record. The tests show that the method is precise in positioning and the inspection result can be displayed in real time; it possesses higher applicable value in airtightness inspection process for fluid transportation pipelines.
Two-vehicle inspection Wireless communication Real-time positioning Leak inspection vehicle Positioning vehicle
北華航天工業(yè)學(xué)院青年基金資助項(xiàng)目(編號(hào):KY-2014-18);
北華航天工業(yè)學(xué)院重點(diǎn)基金資助項(xiàng)目(編號(hào):ZD-2014-02)。
李宗睿(1982-),男,2010年畢業(yè)于河北工業(yè)大學(xué)電子與通信工程專(zhuān)業(yè),獲碩士學(xué)位,講師;主要從事信號(hào)智能檢測(cè)及智能處理領(lǐng)域的研究。
TP216
A
10.16086/j.cnki.issn1000-0380.201506022
修改稿收到日期:2015-01-15。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
