主被動調諧控制結構動力響應分析與試驗*
2015-06-09 12:36:07劉彥輝周福霖閆維明
振動、測試與診斷 2015年3期
劉彥輝, 譚 平, 周福霖,, 閆維明
(1.廣州大學減震控制與結構安全國家重點實驗室(培育) 廣州,510405)
(2.北京工業大學建筑工程學院 北京,100124) (3.多倫多大學土木工程系 加拿大,多倫多,M5S1A4)
主被動調諧控制結構動力響應分析與試驗*
劉彥輝1,2,3, 譚 平1, 周福霖1,2, 閆維明2
(1.廣州大學減震控制與結構安全國家重點實驗室(培育) 廣州,510405)
(2.北京工業大學建筑工程學院 北京,100124) (3.多倫多大學土木工程系 加拿大,多倫多,M5S1A4)
針對地震和風振下結構的振動控制,提出了結構主被動復合調諧控制的策略,以及采用直線電機驅動主動質量阻尼器(active mass damper,簡稱AMD)、中空橡膠隔震支座作為調諧質量阻尼器(tune mass damper,簡稱TMD)彈性單元、滑軌作為TMD支撐軌道的主被動復合調諧控制裝置實現方法,進行了主被動復合調諧控制對結構動力響應控制的效果及減震機理分析,探討了反饋響應向量對控制效果、AMD控制力和AMD位移的影響,完成了線性二次高斯算法(linear quadratic Gaussian,簡稱LQG)控制算法和H2/H∞控制算法時的主被動復合調諧控制結構振動臺試驗。研究結果表明:結構主被動復合調諧控制能有效減小結構的動力響應,改善TMD的性能;采用直線電機驅動的AMD作為主動控制裝置,為防止AMD“飄移”,AMD位移應作為目標向量和反饋響應;LQG控制算法總體控制效果優于H2/H∞控制算法。試驗驗證了提出的主被動復合調諧控制硬件系統方案的可行性,為工程應用提供了支撐。
復合調諧控制; 振動控制; 主動質量阻尼器; 調諧質量阻尼器; 控制算法
引 言
近年來,隨著經濟的快速發展,世界各地興建了大量的高層建筑、超高層建筑、電視塔等高聳結構,特別是城市的地標性建筑已經成為城市經濟實力的象征。如何保證這些高層、超高層、高聳結構地震作用下的安全性以及強風作用下的舒適性和安全性已經成為需要迫切解決的關鍵問題。大量的研究與工程實踐表明,結構振動控制技術可改變結構的動力特性,減小結構的風致振動和地震響應,提高其抗風抗震性能,而結構主被動復合調諧控制技術具有主動控制的自適應性以及被動控制的無條件穩定性與可靠性,已成為國內外結構振動控制領域研究的熱點課題。
目前,國內外對主被動復合調諧控制系統進行了一系列的研究。Lu等[1]對AMD和被動阻尼器組成的復合調諧質量阻尼器進行了研究。Nagashima等[2]對安裝在實際36層鋼結構上的復合調諧質量阻尼器的性能進行了研究,結果表明復合調諧控制對結構擺動和扭轉具有良好的控制效果。Fujinami等[3]對安裝由旋轉電機驅動的AMD擺式復合調諧質量阻尼器的一棟100 m鋼框架辦公樓的減震性能進行了研究。Watakabe等[4]探討了復合調諧控制系統中AMD、彈簧和黏滯阻尼器對復合調諧質量阻尼的減震效果的影響。Saito等[5]研究了安裝伺服電機和隔震支座組成的復合調諧質量阻尼器的一棟200 m高鋼框架結構的減震性能,結果表明頂部加速度均方差可減小25%~50%。Nakamura等[6]對安裝在由伺服電機驅動的AMD、線性彈簧和黏滯油阻尼器組成的復合調諧質量阻尼器的93 m鋼框架混凝土核心筒結構的減震性能進行了研究,當控制力超過伺服電機的最大力時,系統將轉到被動控制模式成為TMD。Fisco等[7]對復合控制調諧阻尼器的主要特性進行了分析。歐進萍等[8-9]對AMD、線性彈簧和阻尼器組成的混合調諧質量阻尼器的參數設計進行了研究。呂西林等[10]對裝有懸吊式復合調諧質量阻尼器的492 m上海環球金融中心的減震效果進行了研究,結果表明復合控制將整體結構的阻尼比提高8倍左右,結構風振響應減小到60%以下。安方等[11]對基于速度-加速度時滯反饋的振動控制系統控制算法進行了研究。筆者所在課題組提出了一種在TMD上設置直線電機的AMD新型的主被動混合控制系統(HMD),目前已成功應用于廣州塔的風振控制[12-15]。
筆者針對提出的結構主被動復合調諧控制的策略,提出了采用直線電機驅動AMD、中空橡膠隔震支座作為TMD彈性單元、滑軌作為TMD支持軌道的主被動復合調諧控制裝置實現方法,并進行了地震和模擬風振作用下LQG控制時主被動復合調諧控制對結構動力響應控制的控制效果及減震機理分析,以及LQG和H2/H∞控制算法時的主被動復合調諧控制結構地震模擬振動臺試驗。分析和試驗結果表明,復合調諧控制技術具有良好的減震效果,驗證了提出的主被動復合調諧控制硬件系統方案完全可行,為工程應用提供了支撐。
1 新型主被動復合控制系統及動力模型
新型主被動復合控制系統(hybrid mass damper,簡稱HMD)是在被動調諧裝置(TMD)上再設置一小質量的主動調諧系統(AMD),從形式上看是雙層調諧質量在運動。它通過小質量塊的快速運動產生慣性力來驅動大質量塊的運動,從而抑制主體結構的振動。當主動調諧控制系統失效時,變為被動調諧質量阻尼器(TMD),因此具有fail-safe的功能。AMD控制裝置絕大多數是依靠液壓驅動或者是伺服電機馬達驅動,液壓系統構造復雜,需要空間大,能源利用效率降低,需要定期換油,維護成本高,運行時噪音大,這些問題在一定程度上限制了液壓驅動型AMD控制系統的應用。旋轉伺服電機雖然對液壓驅動作了一些改進,但由于它需要借助于機械傳動部件(滾珠絲杠)等中間環節,存在響應慢、難以獲得更高的加速度、控制精度低等問題,一直影響其在實際工程中的應用。隨著大驅動力直線電機的出現,筆者提出了把AMD質量與直線電機作成一體化結構,形成直線電機驅動的AMD。在被動TMD控制裝置方面,目前主要采用懸吊式TMD或支撐式TMD。當采用懸吊式TMD時,由于懸擺較長,且需要設置阻尼器,通常需要較大的空間才能實現;當采用支撐式TMD時,其彈性元件通常用彈簧提供剛度,需要彈簧的長度較長,造成設計的支撐裝置較大,引起控制裝置造價大幅上揚。因此,筆者提出了中空橡膠隔震支座(具有較好的線性剛度)作為TMD彈性單元、雙向導軌作為TMD支撐的復合控制系統硬件實現策略。提出的新型主被動復合控制系統如圖1所示。

圖1 新型主被動復合控制裝置Fig.1 Innovative hybrid control device
設多自由度結構在頂層安裝了HMD控制系統,則結構在HMD控制下的控制系統運動方程可以表示為
(1)

M,C,K分別為
其中:mi為結構第i層的質量;kij和cij分別為結構的剛度和阻尼系數;mt和ma分別為TMD和直線電機驅動AMD動子的質量;ct和ca分別為TMD和AMD的阻尼系數;kt和ka分別為TMD和AMD的剛度。
HMD系統AMD中并沒有設置剛度和阻尼單元進行直接傳力,亦即Ca和Ka應取為零,但考慮到數值仿真計算的收斂、TMD軌道的摩擦力,以及設置在TMD上的直線電機驅動AMD的定子和動子之間軌道的摩擦力,需要將Ka設置成一個較小的數值以及將摩擦力等效轉化為關于阻尼系數Ca的表達式。
將受控結構運動方程用狀態空間方程來表達
(2a)
(2b)
選擇輸出向量y為結構層間位移、TMD相對頂層的位移、AMD相對TMD的位移以及結構、TMD和AMD的絕對加速度。因此, 輸出矩陣為
其中:G為能輸出相對位移的變換矩陣。
2 HMD振動控制仿真及參數分析
仿真模型為單自由度體系,結構的質量、剛度和阻尼系數分別為3 200 kg,880 kN/m和3 183.9 (N·s)/m,TMD的質量和剛度分別為200 kg和190 kN/m,TMD的阻尼系數為1 547.3 (N·s)/m,AMD質量為70 kg(動子質量為45 kg,定子質量為25 kg)。考慮到數值仿真的收斂性,令AMD的剛度和阻尼系數均為0.01,由于仿真的目的是檢驗主被動復合控制的有效性以及能改善TMD的頻率敏感性,因此仿真的TMD性能參數不是最優參數。分別進行無控結構、TMD控制結構及HMD控制結構在外部激勵下的動力響應分析,控制算法采用LQG,輸入地震波分別為Kobe地震波、EI Centro地震波、Taft地震波。為了模擬風荷載對結構的作用,對結構輸入合成諧波,其根據正弦掃頻波掃頻得到的結構頻率2.56 Hz進行合成,合成諧波的計算公式為


(3)
其中:a為合成的諧波;t為時間;A根據合成諧波的峰值進行調整,持續時間為40 s。
2.1 動力響應分析
LQG控制時控制目標向量為結構位移、結構絕對加速度和AMD沖程,反饋向量為結構絕對加速度、TMD絕對加速度和AMD沖程。通過反饋向量,估計結構的全狀態進行控制。圖2及圖3分別為Kobe地震波作用下結構的位移和加速度響應,表1為各工況下結構最大響應及最大控制力。從圖2、圖3及表1 可以看出,采用HMD控制,無論是模擬的風荷載及實際的地震作用,結構的位移響應和加速度響應均有較大程度的減小,對實際地震波作用下的結構最大位移和最大加速度響應平均值減小為原結構的78%和73%,對加速度響應的控制優于對位移響應的控制,對模擬的風荷載作用下的結構位移和加速度響應峰值減小為原結構的25%和24%,HMD對風荷載下的控制效果優于對地震作用下的控制效果。同時可以看出,TMD對模擬的風荷載作用下的結構響應比較有效,而對于地震作用下,有些地震波有效,而在某些地震波作用下,甚至放大結構的響應,控制效果與地震激勵有關。由此可見,在TMD上設置AMD形成的HMD大大改善了TMD的性能,無論是風荷載或是地震作用下,都有良好的控制效果。圖4和圖5分別為合成諧波和Kobe地震波作用下的AMD控制力與結構層位移關系圖。可以看出,在合成諧波作用下,曲線比較飽滿,說明HMD耗能能力比較強,這從機理上說明HMD對風荷載下的控制效果優于對地震作用下的控制效果。
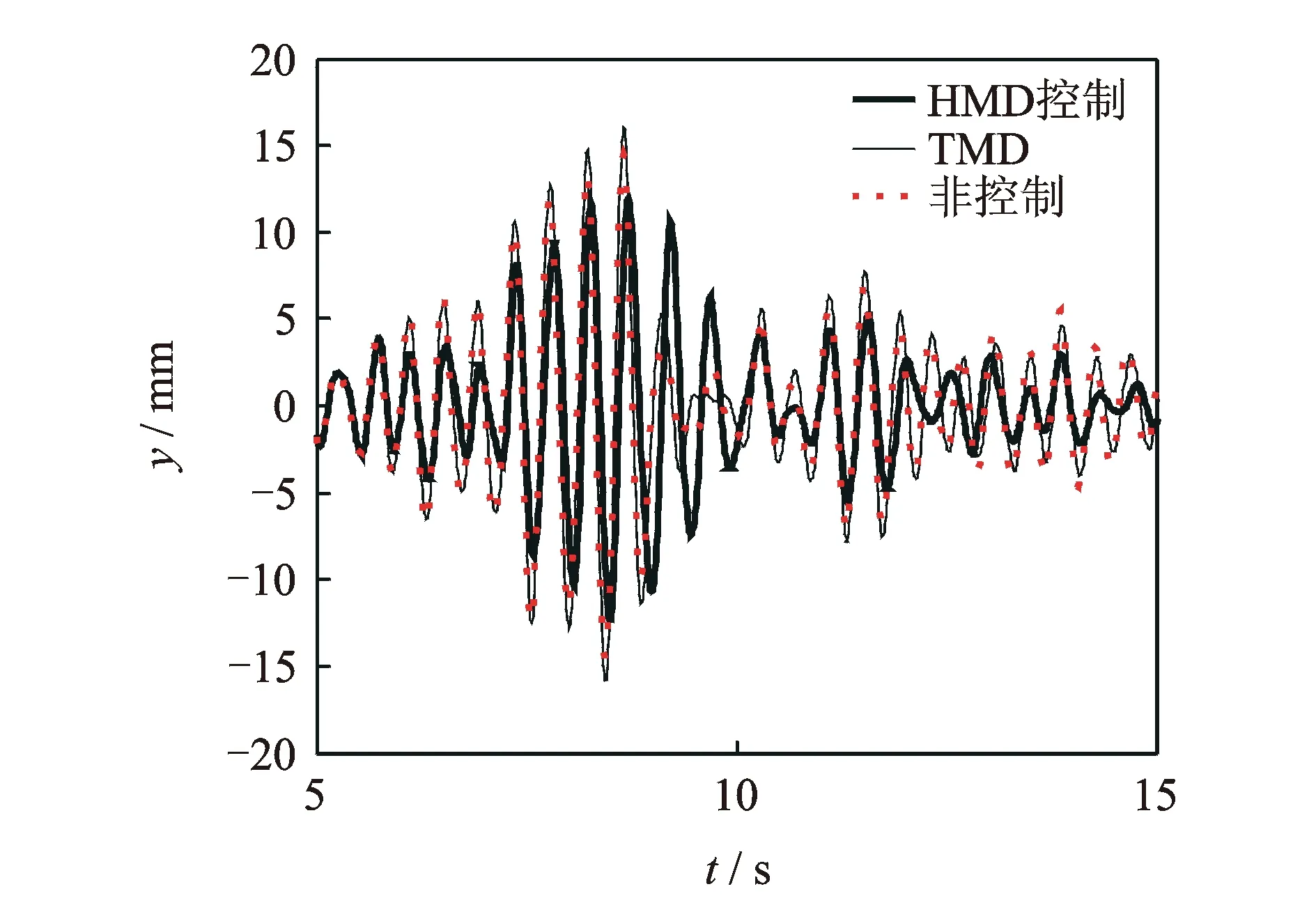
圖2 結構位移響應(Kobe地震波)Fig.2 Displacement response of structure (Kobe)
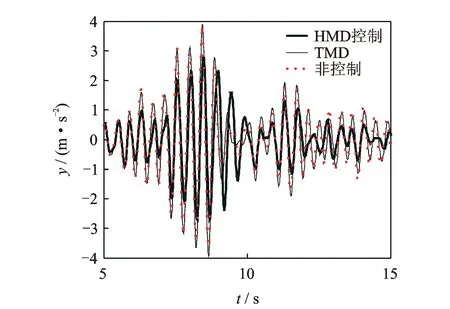
圖3 結構加速度響應(Kobe地震波)Fig.3 Acceleration response of structure (Kobe)

圖4 控制力與結構層位移關系(合成諧波)Fig.4 Relation of deformation to control force (Harmonic)

圖5 控制力與結構層位移關系(Kobe地震波)Fig.5 Relation of deformation to control force (Kobe)
Kobe地震波作用下AMD位移響應如圖6中工況1曲線,AMD的位移響應在HMD控制中是比較重要的控制內容,關系到在實際工程中AMD裝置的實現問題及造價;因此,要求AMD持續工作時應無“漂移”現象,以及最大位移在AMD設計時能夠實現。從圖6中工況1曲線可以看出,AMD位移基本沒有“漂移”。
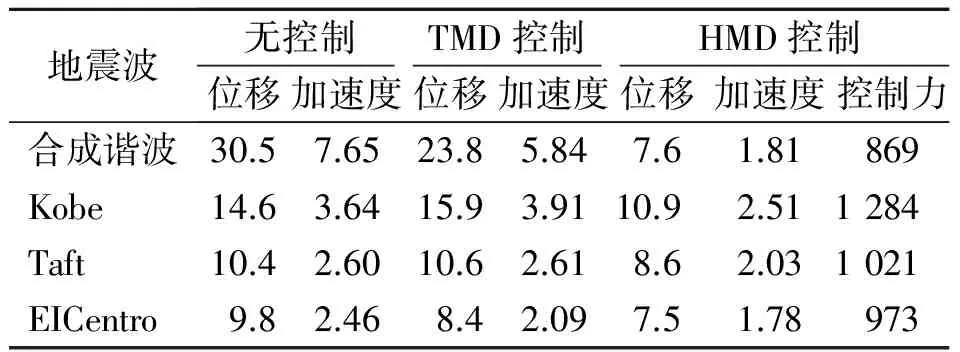
表1 各工況下結構最大響應及最大控制力
2.2 反饋響應向量參數分析
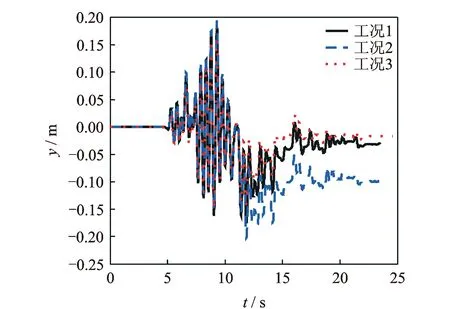
圖6 AMD位移響應(Kobe,有摩擦力)Fig.6 AMD displacement (Kobe, with friction)

圖7 結構加速度響應(Kobe,無摩擦力)Fig.7 Structure acceleration (Kobe, without friction)
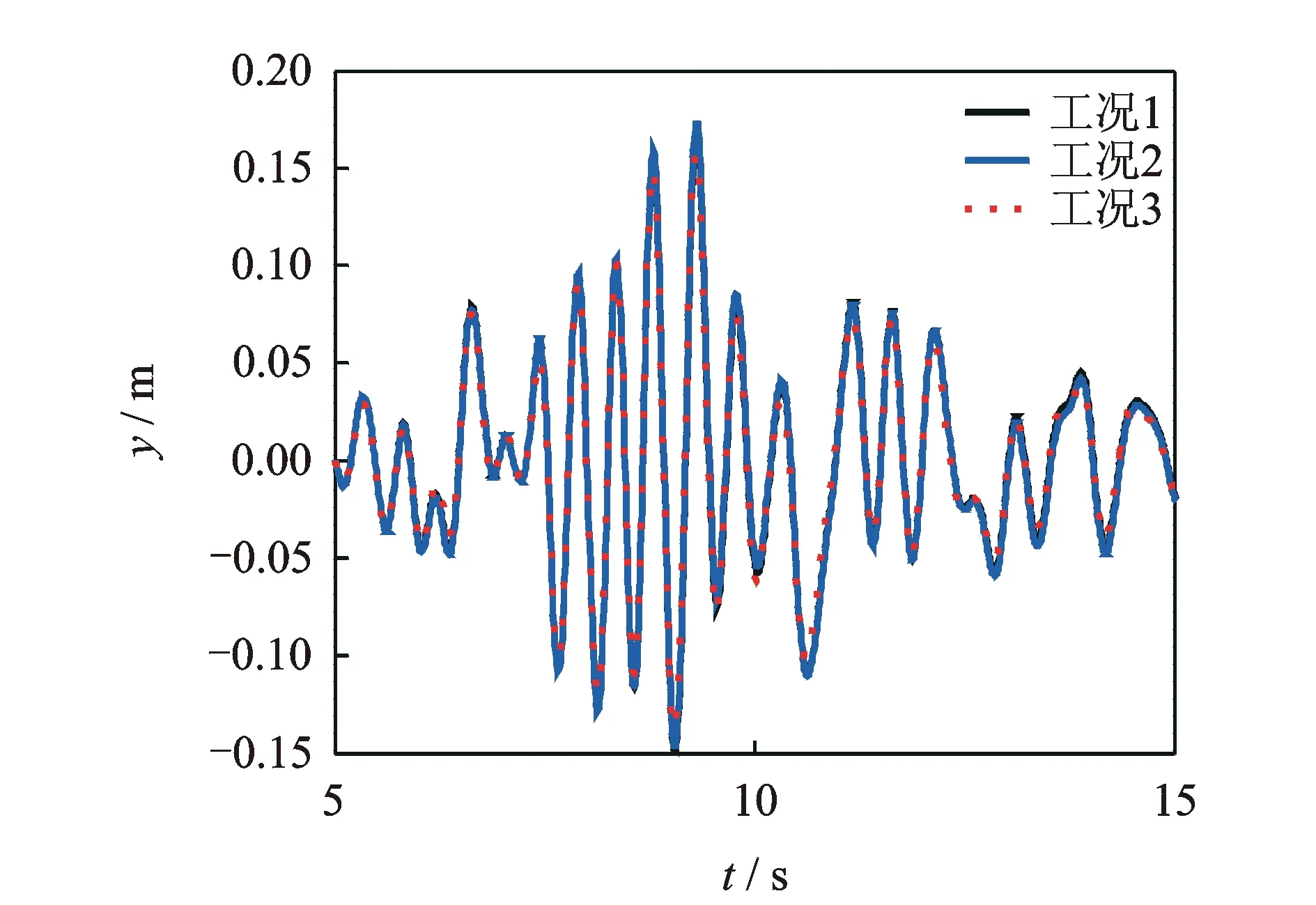
圖8 AMD位移響應(Kobe,無摩擦力)Fig.8 AMD displacement (Kobe, without friction)
由于結構加速度是主要反饋向量,進行參數分析時采用3種工況:工況1反饋向量同2.1節;工況2反饋結構絕對加速度、TMD絕對加速度;工況3反饋結構絕對加速度和AMD沖程。圖7和圖8分別為工況Kobe地震波作用下結構加速度與位移響應,為了顯示清晰,只取主要振動段的響應。由圖可以看出,在理想條件下采用不同的反饋量,結構的加速度響應控制效果基本一樣,這主要是因為通過LQG控制時根據不同的反饋量估計結構的全狀態是一樣的,因此控制效果基本一致,而且AMD位移響應也基本一致。然而在實際工程應用中,AMD不可避免地存在摩擦力,因此,有必要研究AMD軌道存在摩擦力情況下,不同反饋響應的控制效果及AMD位移。分析時假定摩擦力模型為
(4)

圖9和圖6分別為在AMD軌道存在摩擦力情況下Kobe激勵下各工況的結構加速度和AMD位移響應。從圖9和圖6可以看出,在有摩擦力情況下,不同反饋時對結構加速度響應控制基本一樣,說明不同的反饋量對結構響應的控制效果是一樣的,但是有摩擦力情況下采用不同反饋時,AMD位移響應有較大的區別。從圖6可以看出,當采用AMD位移反饋時,摩擦力對AMD位移影響比較小,基本沒有“漂移”現象;而沒有采用AMD位移反饋時,AMD位移有很大的“漂移”。這對結構主動控制是很不利的,特別是長期風振實時控制時,AMD會“漂移”到限位的位置,AMD將失效,失去對結構的控制。因此在進行HMD主動控制時,AMD位移應作為主要的反饋量之一。
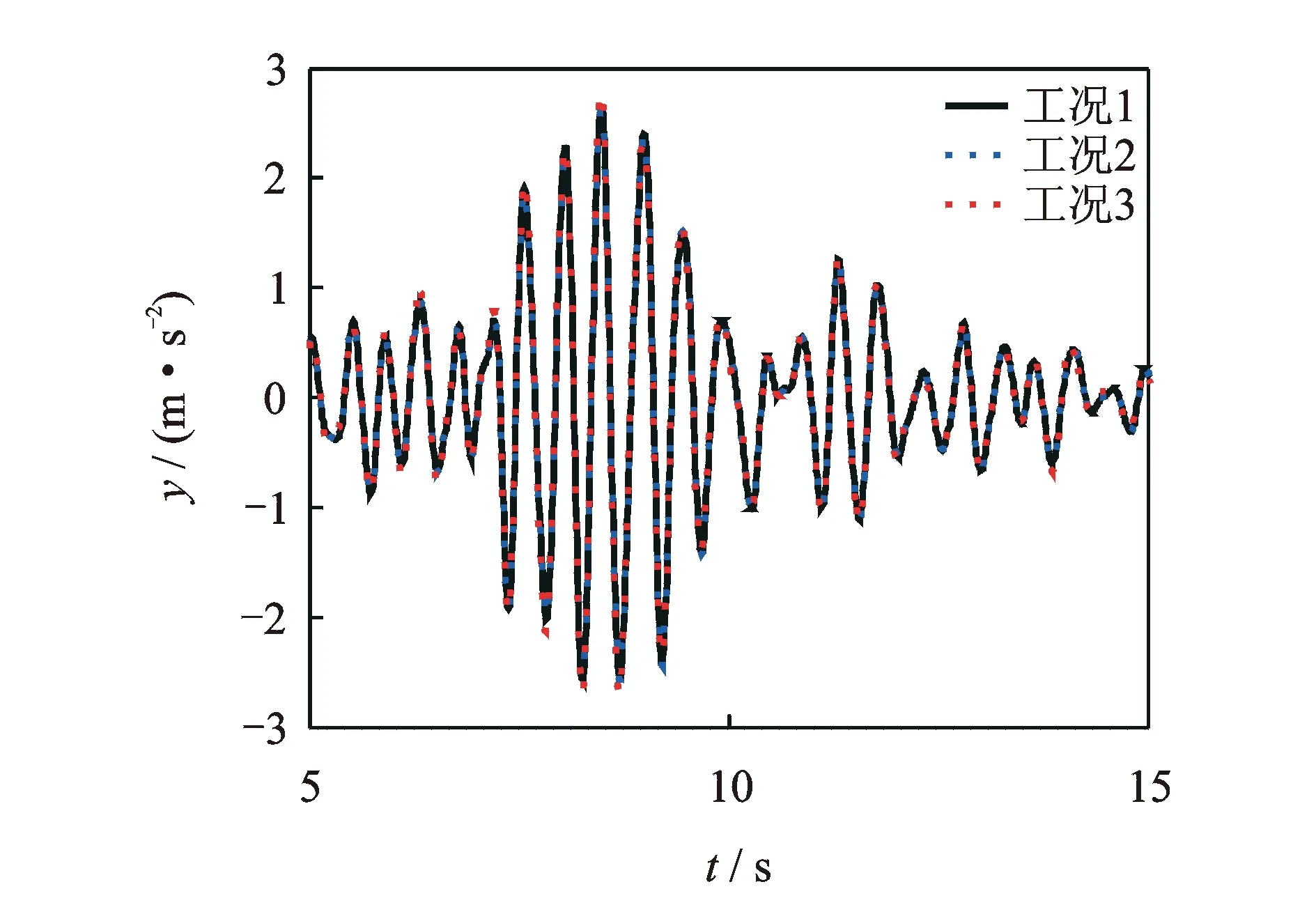
圖9 結構加速度響應(Kobe,有摩擦力)Fig.9 Structure acceleration (Kobe, with friction)
3 HMD振動控制試驗
3.1 試驗模型
設計試驗受控結構模型參數同第2節仿真模型,用總質量約為3 200 kg的鋼筋混凝土質量塊模擬受控結構的質量,底部放置4個無鉛隔震支座以模擬結構的剛度。TMD的導軌以及用來模擬其剛度的兩個中空隔震支座將受控質量塊和鋼板(TMD質量)連接起來。鋼板與AMD的基座(定子)相連,如圖10所示。直線電機驅動的AMD參數如下:最大出力為±3 kN;額定出力為±1 kN,最大行程為±350 mm;最大速度為±3 m/s;動子質量約為45 kg;定子和基座質量約為70 kg。

圖10 試驗模型Fig.10 Experimental model
3.2 HMD振動控制試驗系統與工況
進行實時控制時,振動控制算法采用LQG和h2/h∞控制算法。通過振動臺對模型進行激振,由傳感器測量得到模型的響應,輸入到DSpace系統,經A/D轉換、控制算法在線實時計算控制力,再經D/A轉換,傳輸到TwinCAT I/O的EL3102,TwinCAT系統接收到此信號并傳輸給工控機,再由工控機直接驅動直線電機(AMD)。直線電機驅動的HMD控制試驗系統框圖如圖11所示。

圖11 試驗系統框圖Fig.11 Block Diagram of the Experiment System
振動臺輸入激勵同第3節激勵。首先,固定TMD與AMD,進行4種激勵下的無控結構的振動臺試驗;然后,放開TMD,固定AMD,進行4種激勵下的TMD控制的振動臺試驗;最后,放開TMD與AMD,進行4種激勵下兩種控制算法時的HMD振動控制試驗。
3.3 試驗結果與分析
表2為各工況下主結構的動力響應,圖12及圖13分別為Kobe地震波下各工況的結構加速度響應(Kobe地震波下的響應取主要振動時段)和結構位移響應。由表2、圖12和圖13可以看出,各工況下HMD控制的結構位移和加速度響應得到有效的控制,特別是對于合成諧波結構位移和加速度響應峰值分別減小為無控結構的44.7%和54.0%。但TMD控制對輸入激勵特性比較敏感,有時會對結構的位移響應和加速度響應控制不起作用。在TMD上設置AMD形成HMD控制后,試驗結果同仿真結果一致,HMD大大改善了TMD的性能,無論是風荷載或是地震作用下,都有良好的控制效果。同時可以看出,LQG控制算法的控制效果優于h2/h∞控制算法,且控制力小于h2/h∞控制算法。
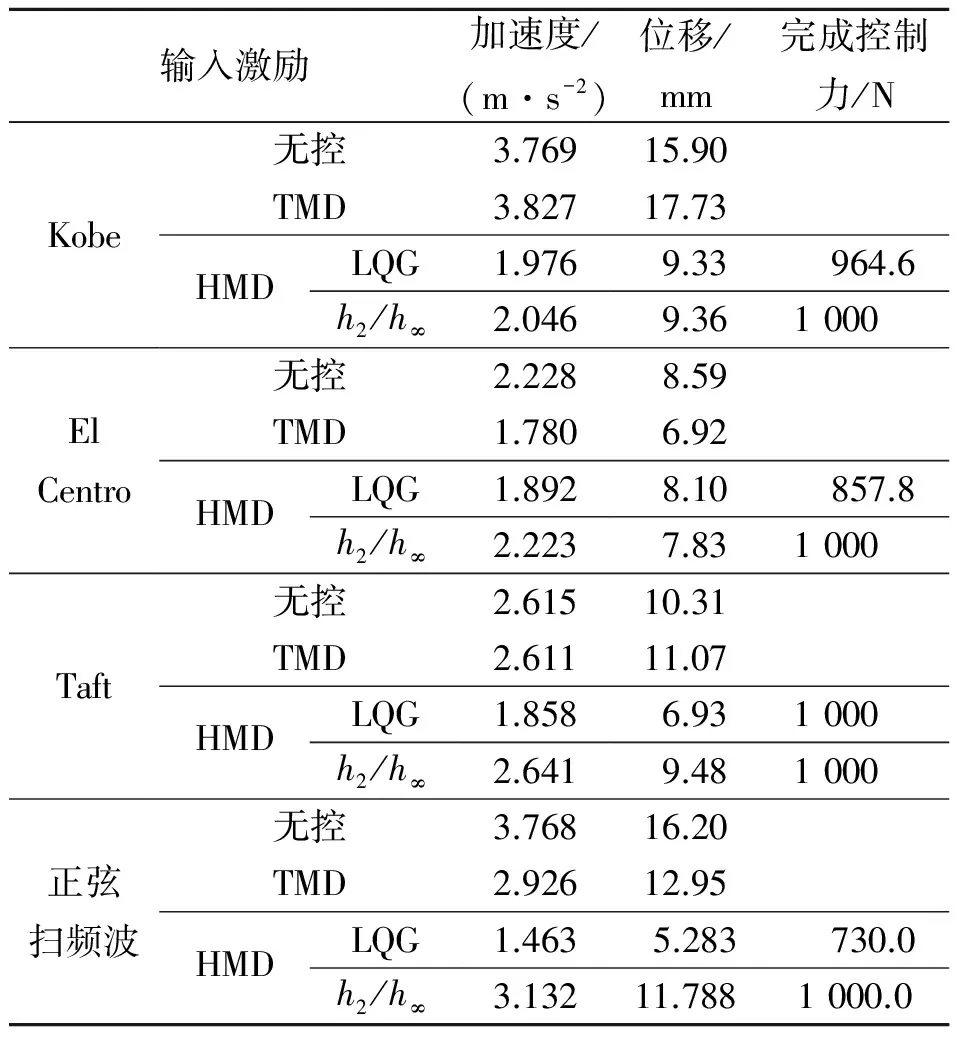
表2 各工況下結構響應最大值
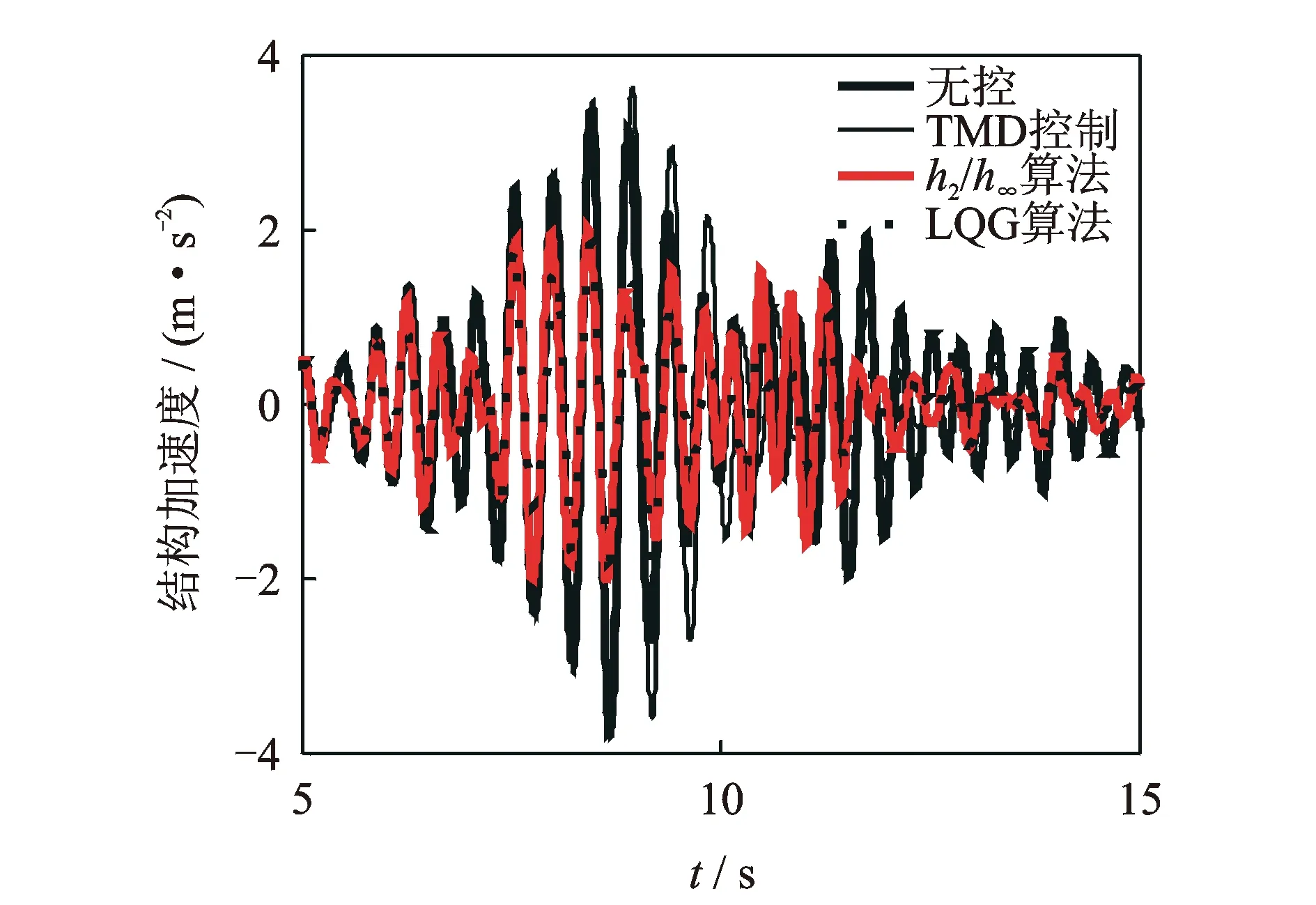
圖12 Kobe地震波下結構加速度(試驗結果)Fig.12 Structure acceleration (Kobe, experimental result)
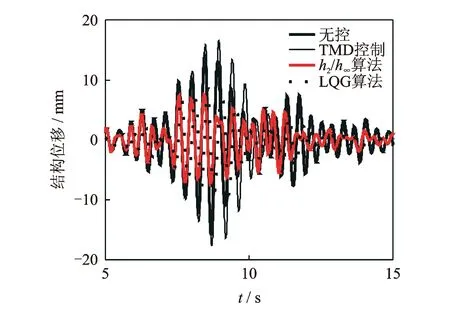
圖13 Kobe地震波下結構位移(試驗結果)Fig.13 Structure displacement (Kobe, testing result)
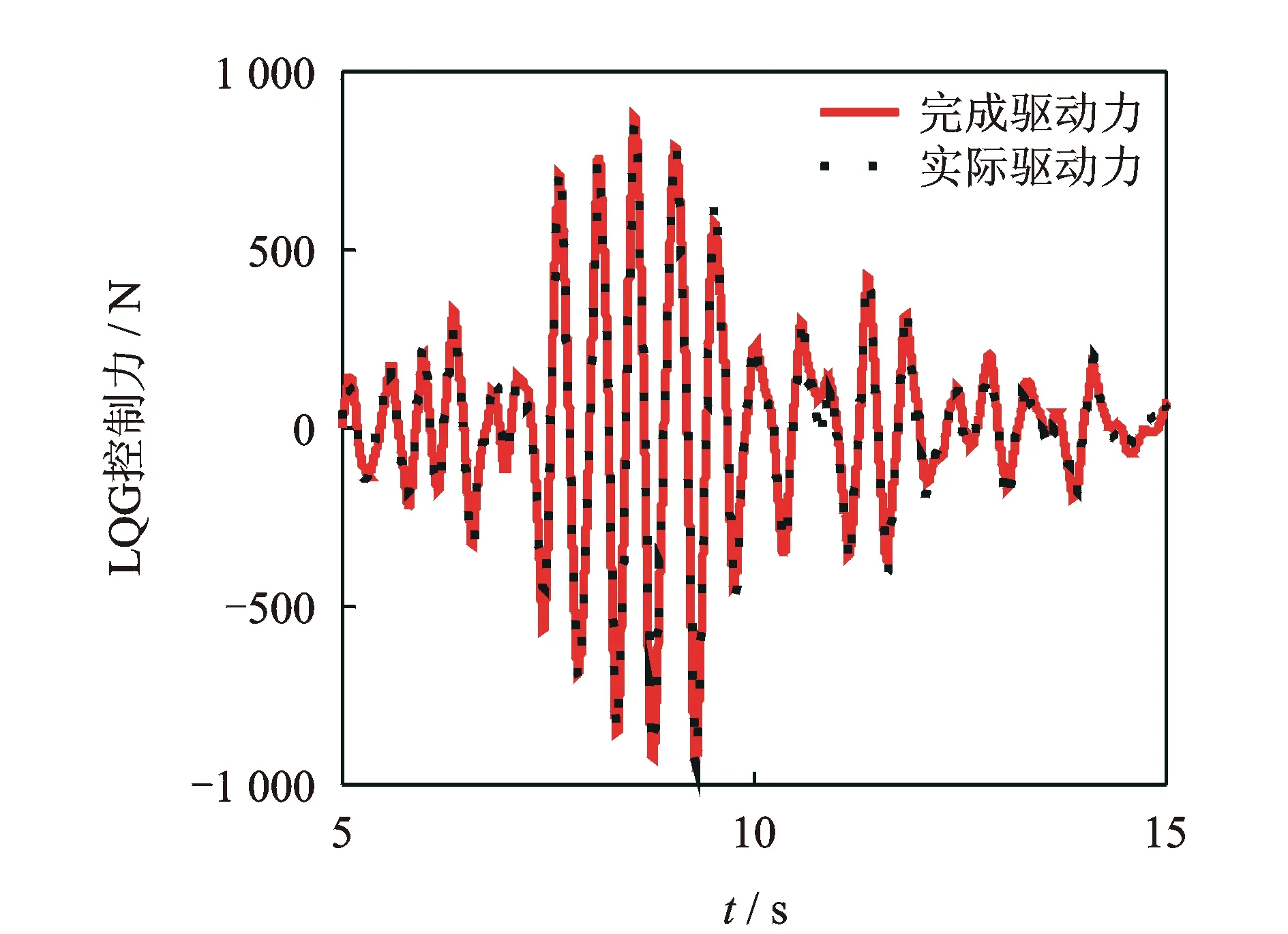
圖14 Kobe地震波下控制力時程(LQG算法)Fig.14 Control force (Kobe, LQG)
圖14為Kobe地震波下HMD控制時AMD控制力時程,各工況下AMD最大控制力見表2。圖14中,實際的驅動力為AMD加速度與AMD質量相乘,為實際作用在結構上的控制力。完成的驅動力為AMD工控機反饋的控制力,該驅動力為實際的驅動力、紋波推力與軌道摩擦力之和。由圖15可以看出,完成的驅動力與實際驅動力基本一致,說明AMD能準確地執行主動力,且AMD的紋波推力及軌道摩擦力相比可不考慮,其他激勵下完成的驅動力與實際驅動力特性同Kobe地震波。試驗時限制AMD最大出力為±1 kN。由表2可以看出,在Taft和掃頻波作用下,h2/h∞控制算法在各種激勵時控制力均達到飽和,而LQG控制算法僅在EI Centro地震波時控制力達到飽和。
4 結 論
1) 提出的采用直線電機驅動AMD、中空橡膠隔震支座作為TMD彈性單元、滑軌作為TMD支撐軌道的主被動復合調諧控制裝置對結構的動力響應有較好的控制效果,整套控制裝置切實可行。
2) 主被動復合控制系統能有效改善TMD系統的性能,在不同的輸入激勵下,HMD控制系統控制效率比較穩定,無論是結構加速度響應或者是位移響應,均能得到較好的控制。HMD對風振作用時的控制效果優于對地震作用時的控制效果。
3) 采用直線電機驅動的AMD作為主動控制裝置,為了防止“飄移”,AMD應為目標向量和反饋響應。試驗結果表明,HMD控制時LQG控制算法總體控制效果優于H2/H∞控制算法。
[1] Lu L Y, Lin G L, Lin C H. A unified analysis model for energy dissipation devices used in seismic-resistant structures[J]. Computer-Aided Civil and Infrastructure Engineering, 2009,24(1):41-61.
[2] Nagashima I, Maseki R, Asami Y, et al. Performance of hybrid mass damper system applied to a 36-story high-rise building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1615-1637.
[3] Fujinami T, Saito Y, Masayuki M, et al. A hybrid mass damper system controlled by H∞control theory for reducing bending-torsion vibration of an actual building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1639-1653.
[4] Watakabe M, Tohdo M, Chiba O, et al. Response control performance of a hybrid mass damper applied to a tall building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1655-1676.
[5] Saito T, Shiba K, Tamura K. Vibration control characteristic of a hybrid mass damper system installed in tall buildings[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1677-1696.
[6] Nakamura Y, Tanaka K, Nakayama M, et al. Hybrid mass dampers using two types of electric servomotors: AC servomotors and linear-induction servomotors[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1719-1743.
[7] Fisco N R, Adeli H. Smart structures: part II—Hybrid control systems and control strategies[J]. Scientia Iranica, Transactions A: Civil Engineering, 2011,18(3):285-295.
[8] 歐進萍.結構振動控制——主動、半主動和智能控制[M].北京:科學出版社,2003:186-235.
[9] 李宏男.結構多維減震控制[M].北京:科學出版社,2008:433-450.
[10]呂西林,李培振,郭獻群,等.上海環球金融中心大廈振動控制及現場實測分析[J].結構工程師,2009,25(4):63-70.
Lü Xilin, Li Peizhen, Guo Xianqun, et al. Vibration control and site measurement on Shanghai World Financial Center Tower[J]. Structural Engineers, 2009,25(4):63-70. (in Chinese)
[11]安方,陳衛東,紹敏強.基于速度-加速度時滯的振動主動控制[J].振動、測試與診斷,2012,32(3):364-370.
An Fang, Chen Weidong, Shao Minqiang. Active vibration control based on time-delayed velocity acceleration feedback[J]. Journal of Vibration, Measurement & Diagnosis, 2012,32(3):364-370. (in Chinese)
[12]Fu Linzhou, Tan Ping, Liu Yanhui, et al. Hybrid mass dampers for canton tower[J]. International Journal on Tall Buildings and Urban Habitat, 2012(1):24-29.
[13]劉彥輝,譚平,周福霖,等.直線電機驅動的AMD性能測試試驗研究[J].土木工程學報,2010,43(12):50-56.
Liu Yanhui, Tan Ping, Zhou Fulin, et al. Experiment investigation of AMD performance driven by linear motor[J]. China Civil Engineering Journal, 2010,43(12):50-56. (in Chinese)
[14]Tan Ping, Ning Xiangliang, Zhang Ying, et al. Application of hybrid mass dampers for vibration control of guangzhou tv and sightseeing tower[C]∥11th World Conference on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures. Guangzhou: [s.n.], 2010.
[15]劉彥輝.結構主被動混合質量阻尼器控制理論與試驗研究[R].北京:北京工業大學,2011.

10.16450/j.cnki.issn.1004-6801.2015.03.006
*國家重點基礎研究發展計劃(“九七三”計劃)資助項目(2012CB723304);廣州市珠江科技新星資助項目(2014J220058);國家自然科學基金資助項目(51478131,51408142);“十二五”科技支撐計劃資助項目(2012BAJ07B02)
2013-11-06;
2013-12-18
TU352.1; TH113
劉彥輝,男,1980年7月生,博士后、副研究員、碩士生導師、國家一級注冊結構工程師。主要研究方向為結構振動控制的研究。曾發表《直線電機驅動的AMD性能測試試驗研究》(《土木工程學報》2010年第43卷第12期)等論文。 E-mail:Liuyanhui2012@163.com
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中華詩詞(2019年7期)2019-11-25 01:43:04
中國生殖健康(2019年2期)2019-08-23 08:12:08
模具制造(2019年3期)2019-06-06 02:10:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
汽車觀察(2016年3期)2016-02-28 13:16:26
現代企業(2015年9期)2015-02-28 18:56:50
