新型12/14無軸承開關磁阻電機的設計
2015-06-05 09:51:54鮑軍芳薛秉坤唐紹飛王惠軍姚丙雷
電機與控制應用 2015年5期
關鍵詞:結構
鮑軍芳, 薛秉坤, 唐紹飛, 王惠軍, 姚丙雷
(1. 北京航空航天大學 儀器科學與光電工程學院,北京 100191;2. 上海電機系統節能工程技術研究中心,上海 200063)
新型12/14無軸承開關磁阻電機的設計
鮑軍芳1, 薛秉坤1, 唐紹飛1, 王惠軍1, 姚丙雷2
(1. 北京航空航天大學 儀器科學與光電工程學院,北京 100191;2. 上海電機系統節能工程技術研究中心,上海 200063)
為了解決傳統無軸承開關磁阻電機(SRM)懸浮力和轉矩之間的耦合,提出一種新型12/14結構的無軸承SRM。新型12/14結構無軸承SRM的特征是定子磁極的內徑圓弧為非等間距。特殊的定子結構不僅使無軸承SRM懸浮力和轉矩的解耦控制成為可能,也實現了轉矩極的短磁路。針對所提出的新型12/14結構無軸承SRM,詳細地介紹了懸浮極和轉矩極的設計;并利用有限元分析了新型12/14結構無軸承SRM的電磁特性。最后,為了驗證所提出結構的正確性,加工了一臺樣機,并進行相關的測試試驗。
開關磁阻電機(SRM); 無軸承; 耦合; 懸浮力; 數學模型
0 引 言
開關磁阻電機(Switched Reluctance Motor, SRM)具有結構簡單、成本低、調速范圍廣、容錯能力強等優點[1-9]。與傳統的機械軸承相比,磁軸承具有無摩擦、無須潤滑和維護、壽命長等優點[10-12]。無軸承SRM同時具有SRM和磁軸承的雙重優點,故自發展以來就受到國內外學者的廣泛關注。
目前,已存在多種結構的無軸承SRM。其中,研究最多的是12/8雙繞組結構無軸承SRM[13]。該電機每個定子磁極上繞制有兩組繞組,用于產生懸浮力和旋轉轉矩。由于,懸浮力和轉矩之間有很強的磁耦合,為實現穩定的懸浮,需要復雜的控制算法,故不利于高速或超高速場合的應用,尤其在高度非線性的情況下,實現解耦控制非常困難。隨后提出的一些其他結構的無軸承SRM,如8/6單繞組結構無軸承SRM和莫里森型SRM等。這兩種電機也未能避免懸浮力和轉矩共磁路的問題。為了解決上述問題,提出兩種混合定子極結構的無軸承SRM,即8/10結構[14]和12/12結構[15]無軸承SRM。但8/10結構無軸承SRM一半的定子磁極用于產生懸浮力,功率密度低。轉矩極的磁通流經直徑方向上的兩個定子磁極閉合,轉矩極和懸浮極的磁通路徑有部分交叉。12/12結構無軸承SRM雖然實現了短磁路結構,但單相電機的轉矩脈動較大,且結構復雜,加工、裝配困難,成本高。
基于上述幾種結構無軸承SRM,本文提出一種新型12/14結構無軸承SRM。針對所提出的新型電機,詳細介紹了其設計方法,并利用有限元仿真分析了電機的電磁特性。根據設計的幾何參數,加工了一臺樣機,并進行了相關的試驗測試。
1 結構和基本原理
圖1給出了新型12/14結構無軸承SRM的結構圖和繞組分布圖。由圖1(a)中可知,新型12/14無軸承SRM的定子采用混合定子極結構,即定子有兩種磁極。一種是用于產生懸浮力的懸浮力磁極,如圖1(b)中的Pxp、Pxn、Pyp和Pyn;另外一種是用于產生旋轉轉矩的轉矩磁極,如圖1(b)中的PA1到PA4,PB1到PB4。電機正常工作時,轉矩磁極PA1到PA4上的繞組串聯,同時通電,構成A相,轉矩磁極PB1到PB4上的繞組串聯,同時通電,構成B相。
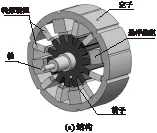
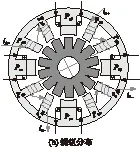
圖1 新型12/14無軸承SRM
新型12/14無軸承SRM的特征是其定子磁極的內徑圓弧為非等間距,如圖1(b)所示。新型電機相鄰的兩個轉矩磁極向相反的方向偏移1/2的換相角。以A相為例,與傳統12/14結構SRM定子磁極的分布相比,轉矩磁極PA1沿逆時針方向偏移1/2的換相角;轉矩磁極PA2沿順時針方向偏移1/2的換相角。偏移后內徑非等間距的定子結構有助于實現短磁通路徑。圖2給出了轉矩磁極PA1和PA2的上繞組的電感特性,其中的虛線表示傳統12/14結構SRM電感曲線,實線表示新型12/14結構無軸承SRM的電感曲線。
圖2 相鄰兩轉矩磁極的電感特性
如圖2所示,傳統12/14結構SRM磁極PA1上繞組電感曲線的上升區間是θ1到θ3,磁極PA2上繞組電感曲線的上升區間為θ2到θ4。由于正轉矩只在電感上升區間產生,所以當磁極PA1和PA2上的繞組同時導通時,正轉矩區只有θ2到θ3。在θ1到θ2區間,磁極PA1上的繞組產生正轉矩,磁極PA2上的繞組產生負轉矩。若磁極PA1和PA2上的繞組同時導通,θ1到θ2區間沒有轉矩輸出。同理,在θ3到θ4區間,磁極PA1上的繞組產生負轉矩,磁極PA2上的繞組產生正轉矩。若磁極PA1和PA2上的繞組同時導通,θ3到θ4區間沒有轉矩輸出。如果磁極PA1上繞組的電感曲線向右平移2.14°,磁極PA2上繞組的電感曲線向左平移2.14°,兩條電感曲線將會重合,同時導通時,正轉矩區也會延長。為了使磁極PA1和PA2上繞組電感重合,如圖2中的虛線所示,新型電機兩個相鄰的轉矩磁極向相反的方向偏移2.14°。相鄰的兩個轉矩磁極的內徑圓弧為25.72°,相鄰的轉矩磁極和懸浮力磁極的內徑圓弧為32.14°。
2 樣機設計
2.1 懸浮力推導
新型12/14結構無軸承SRM的設計過程與普通SRM有所不同,其設計過程不僅包括轉矩極的設計還包括懸浮極的設計。由于轉矩極結構的相似性,新型12/14無軸承SRM轉矩極的設計可以參考普通SRM的設計方法。眾所周知,無軸承SRM懸浮的穩定性直接影響到電機的正常工作,因此在設計新型12/14無軸承SRM時應重點考率懸浮極的設計[16]。因此,本文采用等效磁路法推導出懸浮力與電機基本尺寸的關系。懸浮極的等效磁路如圖3所示。圖3中,N為懸浮繞組匝數,ixp、iyn、ixn、iyp分別為+x、-y、-x、+y方向的繞組電流。

圖3 懸浮極的等效磁路
根據圖3所示的等效磁路可得到各方向懸浮等效磁通的關系如式(1)所示:
(1)
式中:Pxn、Pxp、Pyn、Pyp——-x,+x,-y,+y方向氣隙磁導。
可由電機的基本尺寸推導,如式(2)所示。
(2)
式中:x0、y0——轉子在x、y方向的偏心位移;
g0——單邊氣隙長度;
R——轉子外徑;
βs——轉子極弧;
l——軸向長度;
μ0——真空磁導率。
根據式(1)可推導出各方向等效磁通的表達式如式(3)所示:
(3)
其中,P=Pxp+Pyn+Pxn+Pyp。
求得各氣隙磁導后,根據電磁力的計算式(4)求得x、y方向的徑向力:
(4)
圖4給出計算結果和仿真結果的對比,從圖4中可以看出,計算結果與仿真結果非常吻合,從而也驗證了計算結果的正確性。
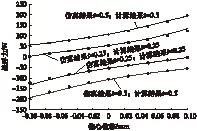
圖4 結果對比
2.2 極弧的選擇
在新型12/14無軸承SRM的設計中既要考慮轉矩極又要考慮懸浮極,因此,新型12/14無軸承SRM設計時要考慮到3個極弧,即轉矩極弧βst、轉子極弧βs及懸浮極弧βsr。轉子極弧和轉矩極弧的設計可以參考普通SRM的設計方法。在普通SRM的設計過程中要獲得盡可能大的電感變化范圍,進而獲得較大的輸出轉矩,就要求轉子極弧和轉矩極弧之和要小于一個轉子極矩;此外,SRM轉子極弧不小于轉矩極弧。同時,為了保證在轉子旋轉過程中,能獲得連續的旋轉轉矩,轉矩極弧要大于電機的換相角。
在新型12/14無軸承SRM設計過程中,除了要考慮到上述條件,還應該確保在轉子旋轉過程中有穩定連續的懸浮力,就要求懸浮力極弧不能小于轉子極矩。綜合上述條件,新型12/14無軸承SRM極弧的取值范圍如圖5所示。
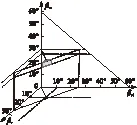
圖5 極弧取值范圍
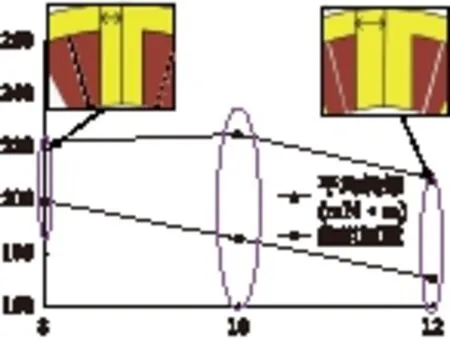
圖6 轉矩極弧的優化
在圖5所示的新型12/14無軸承SRM極弧的取值范圍內,為獲得更好的電機性能,本文采用了一個簡單的優化算法。轉矩極弧的優化如圖6所示。轉矩極弧的長度會影響到定子槽面積,從而影響到轉矩極繞組的匝數N。如果轉矩極弧減小,定子槽面積會增大,相同的條件下,轉矩繞組匝數會增加,輸出轉矩增大。但是,如果轉矩極弧太小,最大電感會減小,輸出轉矩將減小。因此轉矩極弧存在最優值。在優化過程中,峰值電流為1A,轉矩極弧為8°~12°,在整個優化過程中槽滿率一直保持不變。如圖6所示,隨著轉矩極弧的增大,繞組匝數減小,而輸出轉矩先增大后減小,當轉矩極弧為10°時,輸出轉矩最大。因此,新型12/14無軸承SRM的轉矩極弧選擇為10°。
2.3 氣隙的選擇
氣隙是無軸承SRM中非常重要的幾何參數,直接影響輸出轉矩和懸浮力的大小,如式(5)所示:
(5)
式中:μ0——真空磁導率;
N——轉矩繞組匝數;
θ——定轉子的重疊角;
Ns——懸浮繞組匝數;
Lstk——軸向長度;
i——繞組電流。
由式(5)可知輸出轉矩反比于氣隙長度,懸浮力反比于氣隙長度的平方。因此,氣隙長度增加必然會引起輸出轉矩和懸浮力的減小。圖7給輸出轉矩和懸浮力隨氣隙的變化曲線。

圖7 氣隙影響
由圖7可以看出,轉矩和懸浮力均隨著氣隙長度的增加而減小,但是氣隙的選擇要滿足機械加工的要求,因此新型12/14無軸承SRM的單邊氣隙選擇為0.3mm。
3 電磁特性分析
根據上述分析最終得到新型12/14無軸承SRM的參數如表1所示。
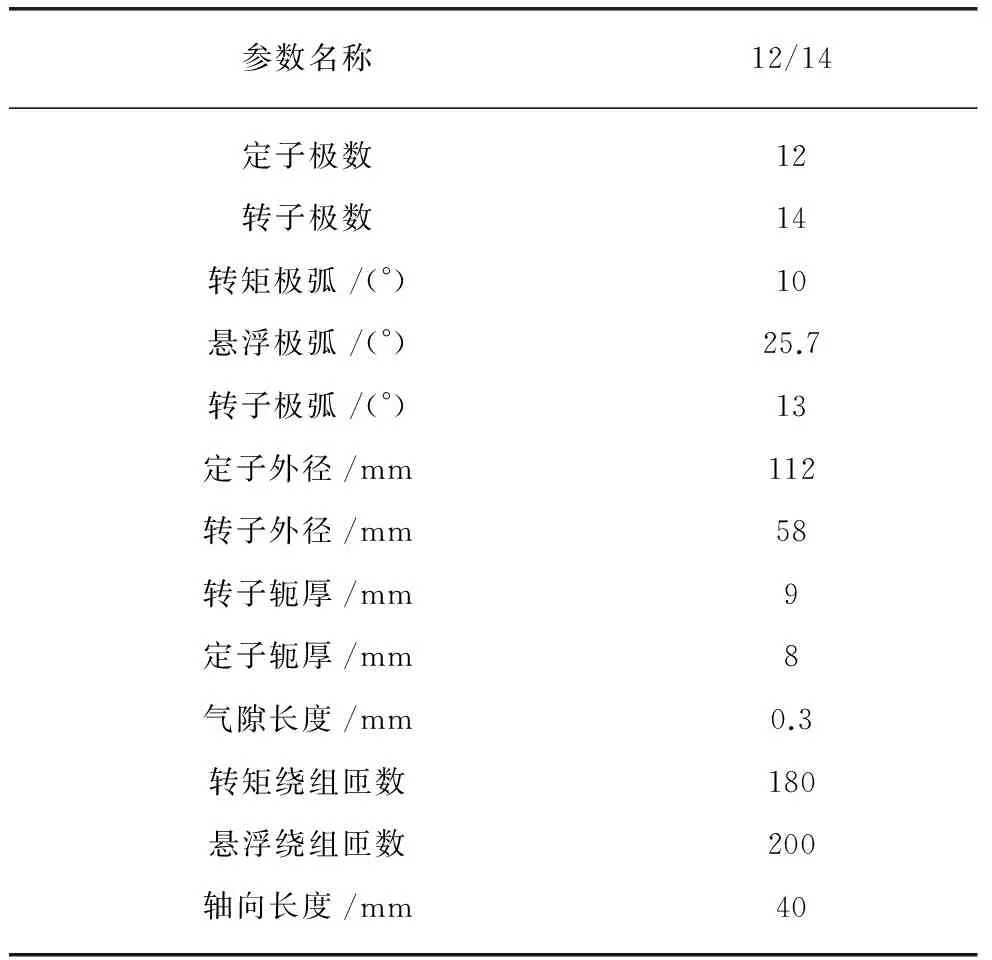
表1 樣機參數
電磁特性是表征電機性能好壞的重要指標,因此,本文根據表1所示的數據,利用有限元仿真軟件分析了新型12/14無軸承SRM的電磁特性。圖8給出了新型樣機轉子處于對齊位置及不對齊位置時的磁通分布圖。從圖8中可以看出新型12/14無軸承SRM轉矩極磁通沿兩個相鄰的轉矩磁極閉合,磁通僅經過六分之一的轉子軛圓周長度,即實現短磁路。
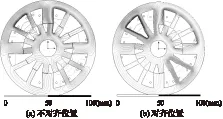
圖8 磁通分布圖
圖9和圖10分別給出了新型12/14結構無軸承SRM轉矩極的電感特性和轉矩特性,其中轉矩繞組電流從1A增大到3A。
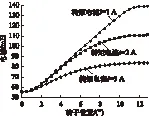
圖9 電感特性
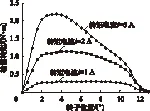
圖10 轉矩特性
圖11給出了懸浮力的特性仿真曲線,在仿真時懸浮極采用差分控制,控制電流分別設置為-0.5°、-0.25°、0.25°、0.5°A。
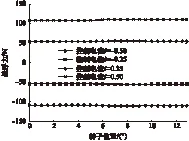
圖11 懸浮力特性
4 試驗結果
根據表1所示的設計參數,加工了一臺樣機如圖12所示,并進行了相關的測試試驗。試驗平臺如圖13所示。
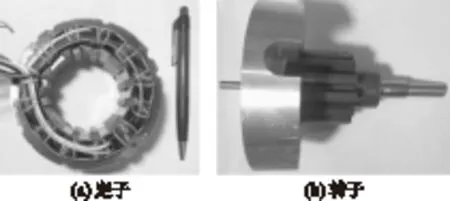
圖12 樣機圖片
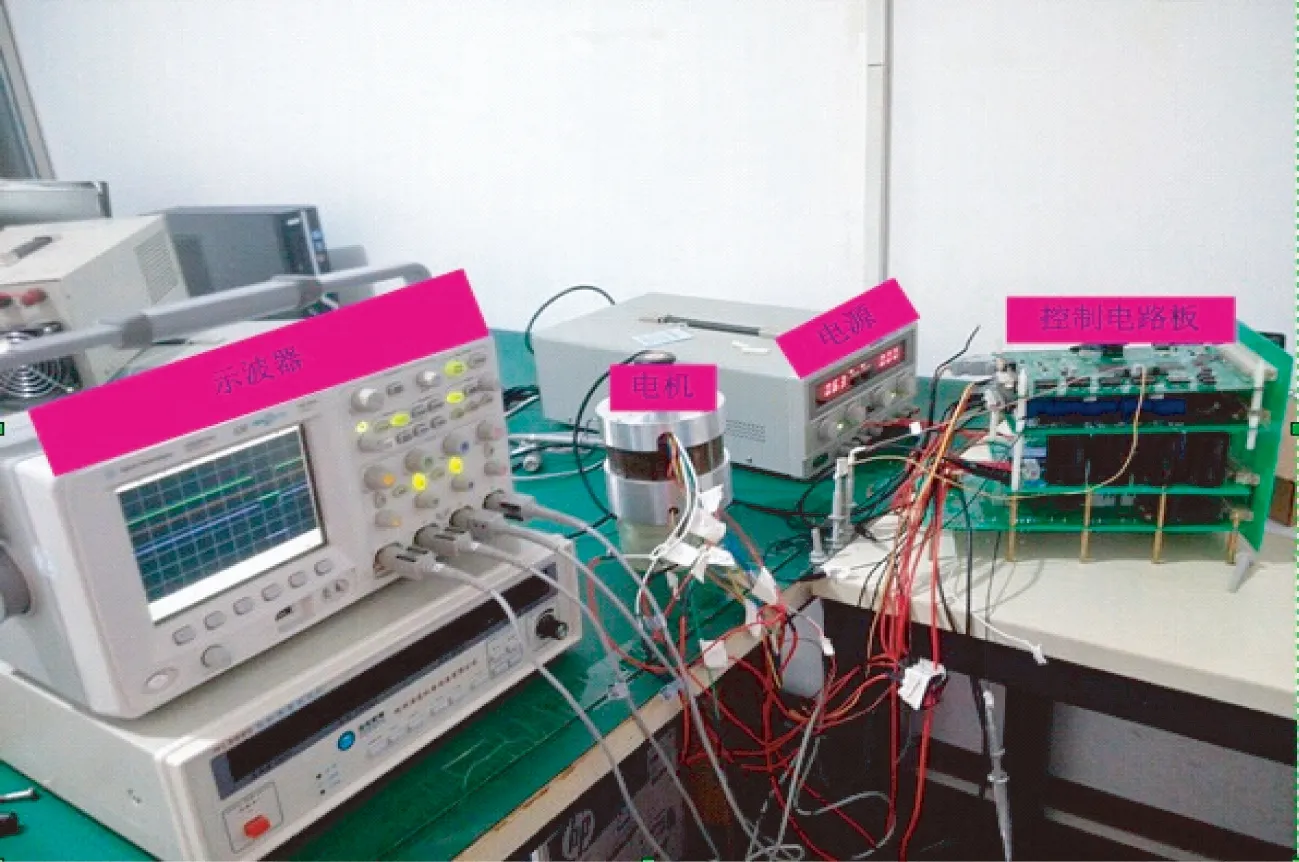
圖13 試驗平臺
圖14給出了新型12/14結構無軸承SRM兩自由度靜態懸浮狀態下的電流波形。為了保證轉子懸浮在中心位置,兩個方向的參考位移為0。從圖14可以看出,控制器通電后,轉子移向平衡位置。

圖14 懸浮電流
圖15給出單自由度懸浮過程中,存在外界干擾時的電流波形和位移波形圖。從圖15可以看出,當存在外界干擾時,位移信號和電流信號都有波動,但很快恢復到平衡位置。

圖15 抗干擾懸浮
5 結 語
本文提出一種新型12/14結構無軸承SRM。針對其特殊的定子結構,利用等效磁路法,推導出了懸浮力的數學模型,用于校正電機基本參數的設計。詳細介紹新型電機極弧的選擇、氣隙的選擇等設計過程,并利用有限元仿真分析其電磁特性。最終設計并加工了一臺樣機,進行了相關試驗測試,從而驗證了相關理論的正確性。
[1] 梅磊,范震乾,張廣明,等.軸向磁通SRM參數設計方法[J].電機與控制應用,2014,41(4): 17-20.
[2] 郭曉穎,蘇建中,馬志國,等.電動汽車高效率SRM系統設計[J].電機與控制應用,2012,39(4): 14-16.
[3] 鄧智泉,嚴仰光.無軸承交流電機的基本理論和研究現狀[J].電工技術學報,2000,15(2): 29-35.
[4] KRISHNAN R. A novel single-switch-per-phase converter topology for four-quadrant PM brushless DC motor drive[J]. IEEE Trans Ind Appl, 1997,33(5): 1154-1161.
[5] 楊鋼,鄧智泉,曹鑫,等.適用于無軸承SRM的功率變換器設計[J].航空學報,2008,29(1): 110-116.
[6] 賀益康,年珩,阮秉濤.感應型無軸承電機的優化氣隙磁場定向控制[J].中國電機工程學報,2004,24(6): 116-121.
[7] HASEGAWA Y, NAKAMURA K, ICHINOKURA O. A novel switched reluctance motor with the auxiliary windings and permanent magnets[J]. IEEE Trans Magn, 2012,48(11): 3855-3858.
[8] CHIBA A, FURUICHI R, AIKAWA Y,et al. Stable operation of induction-type bearingless motors under loaded conditions[J]. IEEE Trans Industry Application, 1997,33 (4): 919-924.
[9] BECERRA R C, EHSANI M, MILLER T J E. Commutation of SR motors[J].IEEE Trans Power Electron, 1993,8(1): 257-263.
[10] 趙旭升,鄧智泉,王曉琳,等.永磁偏置磁軸承的研究現狀及其發展[J].電工技術學報,2009,24(9): 9-20.
[11] TAKEMOTO M, CHIBA A, AKAGI H, et al. Radial force and torqueof a bearingless switched reluctance motor operating in a region of magnetic saturation[J]. IEEE Trans Ind Appl, 2004,40(1): 103-112.
[12] 范東,楊艷,鄧智泉,等.無軸承開關磁阻高速電機設計中的關鍵問題[J].電機與控制學報,2006,110(16): 574-552.
[13] 楊艷,鄧智泉,曹鑫,等.無軸承SRM徑向電磁力模型[J].電機與控制學報,2009,113(13): 377-383.
[14] WANG H, WANG Y, LIU X, et al. Design of novel bearingless switched reluctance motor[J].IET Electric Power Applications, 2012,6(2): 73-81.
[15] LIU J F, WANG H J, BAO J F. A novel permanent magnet biased bearingless switched reluctance motor[C]∥ECCE, 2013: 4342- 4347.
[16] 曹鑫,鄧智泉,楊鋼,等.無軸承SRM麥克斯韋應力法數學模型[J].中國電機工程學報,2009,29(3): 78-83.
[期刊榮譽]
中文核心期刊 中國科技核心期刊 中國學術期刊(光盤版)
全國優秀科技期刊 華東優秀科技期刊
中國科學引文數據庫來源期刊 中國學術期刊綜合評價數據庫來源期刊
Design of New Type 12/14 Bearingless Switched Reluctance Motor
BAOJunfang1,XUEBingkun1,TANGShaofei1,WANGHuijun1,YAOBinglei2
(1. College of Instrument Science and Opto Engineering, Beihang University, Beijing 100191, China;2. Shanghai Engineering Research Center of Motor System Energy Saving, Shanghai 200063, China)
In order to solve the magnetic coupling between torque and radial force in the conventional bearingless switched reluctance motor, a novel 12/14 bearingless switched reluctance motor with single windings was proposed. The feature of the new motor was that it was equipped with non-equidistant inner pole arc stator. The special structure stator not only mades the decoupling control of the radial force and torque in bearingless switched reluctance motor become possible, but also introduced the short path concept to the torque. For the new motor, the design of the torque pole and radial force pole were described in detail. Finite element analysis (FEA) was employed to analyze the electromagnetic characteristics of the new motor. Finally, to verify the validity of proposed structure, one prototype motor was manufactured, and related tests were done.
bearingless switched reluctance motor; bearingless magnetic; coupling; mathematic model
王惠軍
TM302
A
1673-6540(2015)05-0032-06
2014-10-28
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50