一種帶有末端彈體姿態(tài)角約束的非線性制導(dǎo)律
2015-06-05 14:51:32李新三汪立新劉國輝閆循良王明建丁邦平
中國慣性技術(shù)學(xué)報 2015年2期
李新三,汪立新,劉國輝,閆循良,王明建,丁邦平
(1. 第二炮兵工程大學(xué) 三系,西安 710025;2. 第二炮兵工程大學(xué) 士官學(xué)院,青州 262500)
一種帶有末端彈體姿態(tài)角約束的非線性制導(dǎo)律
李新三1,汪立新1,劉國輝2,閆循良1,王明建2,丁邦平2
(1. 第二炮兵工程大學(xué) 三系,西安 710025;2. 第二炮兵工程大學(xué) 士官學(xué)院,青州 262500)
針對帶有末端多約束的三維非線性制導(dǎo)問題,設(shè)計(jì)了一種通用模型預(yù)測靜態(tài)規(guī)劃制導(dǎo)算法。該制導(dǎo)算法通過向后迭代求解權(quán)矩陣微分方程對控制量進(jìn)行更新,將動態(tài)優(yōu)化問題轉(zhuǎn)化為靜態(tài)優(yōu)化問題,計(jì)算效率得以提高。闡述了通用模型預(yù)測靜態(tài)規(guī)劃制導(dǎo)算法的基本原理,詳細(xì)給出了基于通用模型預(yù)測靜態(tài)規(guī)劃算法的制導(dǎo)律設(shè)計(jì)過程。所設(shè)計(jì)的制導(dǎo)律滿足末端法向加速度約束,因此,間接滿足末端彈體姿態(tài)角約束。仿真時考慮目標(biāo)的機(jī)動方式和落角約束,仿真結(jié)果表明,末端位移偏差小于0.5 m,末端落角可控制在0.01°范圍內(nèi),末端法向加速度小于0.01 m/s2,該制導(dǎo)律能夠很好地滿足末端位移、落角和法向加速度約束。
通用模型預(yù)測靜態(tài)規(guī)劃;制導(dǎo)律;落角約束;法向加速度約束;彈體姿態(tài)角約束
目前,人們越來越關(guān)注帶有末端落角約束的制導(dǎo)律技術(shù)研究。以一定的末端落角對目標(biāo)進(jìn)行直接撞擊可以增強(qiáng)彈頭毀滅效果。例如,從上部對掩體內(nèi)的目標(biāo)進(jìn)行攻擊可以輕易擊穿多層防御結(jié)構(gòu),反坦克武器從上部更容易摧毀敵方坦克,對城市目標(biāo)以特定的落角進(jìn)行攻擊顯得越來越有必要。此外,采用帶有末端落角約束的制導(dǎo)律可以提高導(dǎo)彈的突防能力。因此,帶有末端落角約束的制導(dǎo)律研究越來越引起各國學(xué)者的關(guān)注。
帶有末端落角約束的制導(dǎo)律研究最早由Kim和Grider[1]提出,Kim和Grider采用最優(yōu)控制理論對角度和位移偏差進(jìn)行最小化,對地面勻速運(yùn)動目標(biāo)進(jìn)行跟蹤攻擊。Lee等人[2]將一種帶落角約束的最優(yōu)控制律應(yīng)用于目標(biāo)機(jī)動的情形。Kim和Lee[3]在比例導(dǎo)引律的基礎(chǔ)上加了一個時變偏置項(xiàng),此偏置項(xiàng)用來滿足末端攻擊角度約束的要求,不過這種制導(dǎo)律局限于目標(biāo)是固定的情況。近幾年,Padhi和Oza[4]提出了一種模型預(yù)測靜態(tài)規(guī)劃(MPSP)制導(dǎo)算法,實(shí)現(xiàn)在三維空間內(nèi)對地面靜止目標(biāo)或勻速運(yùn)動目標(biāo)進(jìn)行攻擊,滿足末端速度傾角和偏角約束。此外,還有許多其他學(xué)者對帶有末端落角約束的制導(dǎo)律進(jìn)行了系統(tǒng)研究[5-10]。
以上研究均是對導(dǎo)彈飛行速度方向進(jìn)行約束控制,并沒有對彈體姿態(tài)角進(jìn)行約束控制。對目標(biāo)進(jìn)行攻擊時往往希望命中目標(biāo)時的姿態(tài)最佳,以使戰(zhàn)斗部發(fā)揮最大效能,因而研究帶有末端彈體姿態(tài)角約束的制導(dǎo)方法非常有意義。Ilan Rusnak等人[11]基于控制制導(dǎo)一體化理論實(shí)現(xiàn)對彈體末端姿態(tài)角進(jìn)行直接控制,而本文提出了一種在制導(dǎo)體系下對彈體末端姿態(tài)角進(jìn)行間接約束的制導(dǎo)方法。通過對末端法向過載進(jìn)行約束,使之趨于零,從而使得導(dǎo)彈的攻角和側(cè)滑角趨于零。此時導(dǎo)彈的速度傾角和偏角和彈體末端姿態(tài)角是相等的,即通過對導(dǎo)彈末端速度傾角和法向加速度同時進(jìn)行約束,實(shí)現(xiàn)對彈體末端姿態(tài)角的約束。
借鑒MPSP[12-13]方法思想,本文給出一種通用模型預(yù)測靜態(tài)規(guī)劃算法(G-MPSP)[14]用于快速求解具有末端約束的非線性制導(dǎo)問題,將動態(tài)規(guī)劃問題轉(zhuǎn)化為靜態(tài)規(guī)劃問題,允許不經(jīng)過離散化近似而對連續(xù)時間系統(tǒng)的最優(yōu)控制問題進(jìn)行簡化。該制導(dǎo)算法間接滿足彈體姿態(tài)角約束。仿真結(jié)果表明,該制導(dǎo)方法能夠很好地滿足制導(dǎo)要求。
1 G-MPSP制導(dǎo)算法推導(dǎo)
對于一般形式的非線性系統(tǒng),其狀態(tài)方程和輸出方程如下:
式中:X∈?n為狀態(tài)量,U∈?m為控制量,Y∈?p為輸出量。G-MPSP算法需要選擇初始控制量,通過對非線性系統(tǒng)進(jìn)行優(yōu)化以改進(jìn)當(dāng)前的控制量U(t),使得末端時刻tf的輸出量Y(tf)→Yd(tf),Yd(tf)為期望的輸出量。
末端時刻tf對應(yīng)的輸出量偏差可表示為:

通過對控制量進(jìn)行更新使得δY(X(tf))→0。下面詳細(xì)介紹G-MPSP算法推導(dǎo)過程。
首先,式(1)兩邊同時乘以W(t),得:

式中:權(quán)矩陣W(t)∈?p×n,W(t)的作用是將系統(tǒng)狀態(tài)方程映射到輸出空間。
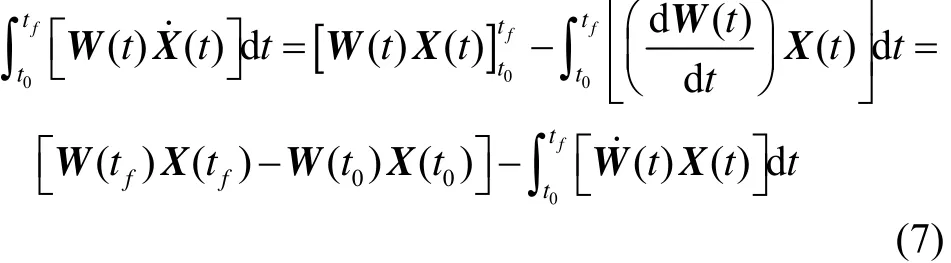
式(4)從t0到tf積分,得:

將Y(X(tf))加到式(5)左右兩邊,得:

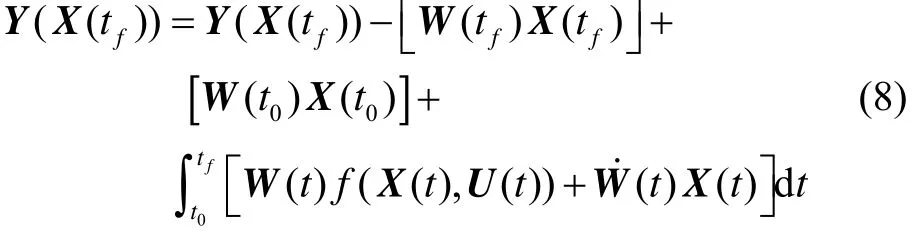
對式(6)最后一項(xiàng)進(jìn)行分步積分,得:
將式(7)代入式(6),得:
對式(8)左右兩邊進(jìn)行變分運(yùn)算,得:
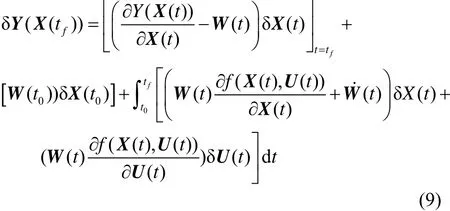
通過選擇權(quán)矩陣W(t)使式(9)中與δX(t)相關(guān)的項(xiàng)為零,得到關(guān)于W(t)的微分方程和邊界條件:
在t∈[tf,t0]范圍內(nèi)反向積分式(10)可對W(t)進(jìn)行求解,積分初始條件見式(11)。式(10)中W(t)的求解類似于有限時間線性二次調(diào)節(jié)器問題中黎卡提方程的求解,不同于調(diào)節(jié)器問題,權(quán)矩陣W(t)與性能函數(shù)的選擇無關(guān)。
由于初始條件是確定的,因此令式(9)中δX(t0)=0。將式(10)代入式(9)中,得到簡化后的表達(dá)式:

其中,

式(12)中,Bs(t)可看作控制量偏差δU(t)和輸出量偏差δY(X(tf))之間的靈敏矩陣,即式(12)建立了末端時刻tf對應(yīng)的輸出量偏差和t∈[t0,tf)時間歷程內(nèi)的控制量偏差之間的聯(lián)系。
考慮如下形式的性能指標(biāo):

式中:Up(t)代表更新前的控制量,δU(t)為更新后控制量與更新前控制量偏差。
以上的推導(dǎo)將動態(tài)優(yōu)化問題的求解轉(zhuǎn)換為滿足末端約束式(12)和性能指標(biāo)式(14)的靜態(tài)優(yōu)化問題。因此,考慮到末端狀態(tài)約束,式(14)表示的性能指標(biāo)函數(shù)可轉(zhuǎn)換為:
式中:λ∈?p為靜態(tài)拉格朗日乘子。對式(15)進(jìn)行變分運(yùn)算,得到以下方程:
由式(16)得:

將式(18)代入式(17),得:

其中,
當(dāng)Aλ非奇異時,由式(19)得:

拉格朗日乘子λ是一個靜態(tài)變量,可由式(22)計(jì)算得到。利用最優(yōu)控制理論求解時變協(xié)態(tài)變量是個很復(fù)雜的問題,但是本文所采用的G-MPSP算法完全避免了這個問題。
將式(22)代入式(18),得:

由式(23)可得到更新后的控制量:

G-MPSP算法將動態(tài)優(yōu)化問題轉(zhuǎn)化為靜態(tài)優(yōu)化問題進(jìn)行求解,靜態(tài)拉格朗日乘子通過一個顯式表達(dá)式計(jì)算,這種處理使優(yōu)化問題大大簡化。
2 G-MPSP制導(dǎo)律設(shè)計(jì)
導(dǎo)彈與目標(biāo)在三維平面內(nèi)運(yùn)動如圖1所示,Vm、γm和ψm分別為導(dǎo)彈速度、彈道傾角和彈道偏角,(xm,ym,zm)為導(dǎo)彈位移,az和ay為測量加速度。
要求導(dǎo)彈精確擊中目標(biāo),并且滿足如下約束:彈道偏角ψm(tf)→ψmf,彈道傾角γm(tf)→γmf,法向過載az(tf)→0,ay(tf)→0。并且在飛行過程中法向過載最小。
圖1 導(dǎo)彈目標(biāo)運(yùn)動示意圖Fig.1 Engagement geometry of missile and target
X=(Vm,γm,ψm,xm,ym,zm,az,ay)為導(dǎo)彈狀態(tài)量,取指令加速度U=(azc,ayc)為控制量。對狀態(tài)量和控制量進(jìn)行歸一化處理,得歸一化后的狀態(tài)方程:
式中:帶下標(biāo)n的量表示歸一化后的變量,帶有*號上標(biāo)的量代表歸一化參考量,Tm為推力,Dm為阻力,τ為導(dǎo)彈自動駕駛儀時間延遲參數(shù)。歸一化后的狀態(tài)方程可表示成:

選擇如下輸出量作為末端狀態(tài)約束:

式中:末端輸出量Yn中的元素都經(jīng)過歸一化處理。
式(25)對狀態(tài)量Xn微分,得:
式(25)對控制量Un微分,得:

式(27)對狀態(tài)量Xn(tf)微分,得:

G-MPSP算法執(zhí)行時,通過通用顯式制導(dǎo)(Generalized Explicit Guidance)對初始控制量進(jìn)行猜測,下文中通用顯式制導(dǎo)簡稱GE制導(dǎo)。文獻(xiàn)[14]給出的慣性系下GE制導(dǎo)指令如下:

式中:k1=(n+2)(n +3),k2=-(n+1)(n+2),n為正整數(shù);Xf和Vf為導(dǎo)彈期望的末端位置和速度,Xm和Vm為導(dǎo)彈飛行時的位置和速度。式(31)中的第一項(xiàng)類似于傳統(tǒng)的比例導(dǎo)引,第二項(xiàng)可以對末端速度進(jìn)行約束。aI(t)經(jīng)過坐標(biāo)轉(zhuǎn)換可得到彈道坐標(biāo)系下的法向過載指令U=(azc,ayc)[14]。
G-MPSP制導(dǎo)律設(shè)計(jì)流程如下:
① 選擇初始控制量。本文通過GE對初始控制量進(jìn)行猜測,這一步將給出導(dǎo)彈的飛行時間tf。
② 通過對導(dǎo)彈和目標(biāo)末端時刻tf的狀態(tài)預(yù)測,求輸出量偏差δY(tf)=Yd(tf)-Y(tf)。如果差值滿足設(shè)計(jì)要求,程序結(jié)束;如果不滿足要求,執(zhí)行步驟③。
③ 對式(10)和(11)進(jìn)行數(shù)值積分計(jì)算W(t),本文采用四階龍格庫塔方法。
④ 由式(13)計(jì)算Bs(t)。
⑤ 由式(20)和式(21)計(jì)算Aλ和bλ。
⑥ 最后,由式(23)和式(24)計(jì)算δU(t)和U(t),令Up(t)=U(t),回到步驟①進(jìn)行下一步迭代。
3 數(shù)值仿真
以某導(dǎo)彈對地面機(jī)動目標(biāo)攻擊進(jìn)行數(shù)值仿真。導(dǎo)彈質(zhì)量:t≤6 s時,mm=165 kg;t>6 s時,mm=150 kg。導(dǎo)彈推力:t≤6 s時,Tm=5880 N;t>6 s時,Tm=0 N。導(dǎo)彈參考面積:Sm=0.0324 m2。阻力Dm計(jì)算參考文獻(xiàn)[14]。導(dǎo)彈初始速度為635 m/s,初始位置為(10000 m, 5000 m, 5000 m),初始彈道傾角和彈道偏角為(0°, 170°)。目標(biāo)速度為常值20 m/s,初始位置為(1000 m, 0 m),初始航跡偏角為60°。歸一化速度、角度、位移和加速度分別取為600 m/s、50°、5000 m和9.81 m/s2。GE制導(dǎo)參數(shù)n=1,APN制導(dǎo)系數(shù)Ne=3,導(dǎo)彈自動駕駛儀時間延遲參數(shù)τ=0.2 s,仿真步長取為0.02 s。
3.1 不同目標(biāo)機(jī)動方式數(shù)值仿真
本節(jié)研究目標(biāo)以不同方式機(jī)動,基于G-MPSP制導(dǎo)算法的數(shù)值仿真。導(dǎo)彈末端時刻彈道傾角和偏角期望值為(-60°, 260°)。目標(biāo)的運(yùn)動模型參照文獻(xiàn)[14],假設(shè)制導(dǎo)系統(tǒng)可以準(zhǔn)確獲得目標(biāo)的狀態(tài)信息,目標(biāo)運(yùn)動方式如下:
① 正弦加速度機(jī)動,ayT=2gsin(ωt),機(jī)動頻率ω=1 rad/s;
② 常值加速度機(jī)動,ayT=g;
③ 直線運(yùn)動,ayT=0,ψT為常值。
給定G-MPSP算法迭代終止條件:末端位置偏差小于1 m,末端落角偏差小于0.2°,末端法向加速度大小小于0.01 m/s2。由GE算法給定初始控制量。
仿真時,經(jīng)過6次迭代可以滿足各種末端約束,末端位移偏差均小于0.5 m。圖2和圖3分別為目標(biāo)以不同的方式機(jī)動時導(dǎo)彈彈道傾角γm和彈道偏角ψm的變化曲線,彈道傾角和偏角均可控制在0.01°范圍內(nèi)。圖4和圖5分別為導(dǎo)彈法向過載az和ay的變化曲線,末端時刻法向加速度az和ay的值均小于0.01 m/s2。導(dǎo)彈擊中目標(biāo)前法向過載快速趨于零,但變化的范圍并不大,并沒有出現(xiàn)劇烈突變。末端時刻法向過載趨于零表明導(dǎo)彈的彈道傾角和彈道偏角與導(dǎo)彈在縱向平面和側(cè)向平面內(nèi)的姿態(tài)角近似相等,即間接滿足末端彈體姿態(tài)角約束。另外,本文所采用的制導(dǎo)算法與單純GE[14]制導(dǎo)相比,攻擊機(jī)動目標(biāo)時制導(dǎo)精度大幅度提高,傳統(tǒng)的PN制導(dǎo)律[13]攻擊機(jī)動目標(biāo)時末端時刻法向過載會發(fā)散。
圖2 目標(biāo)機(jī)動方式不同彈道傾角變化曲線Fig.2 Time histories of γmfor various target maneuvers
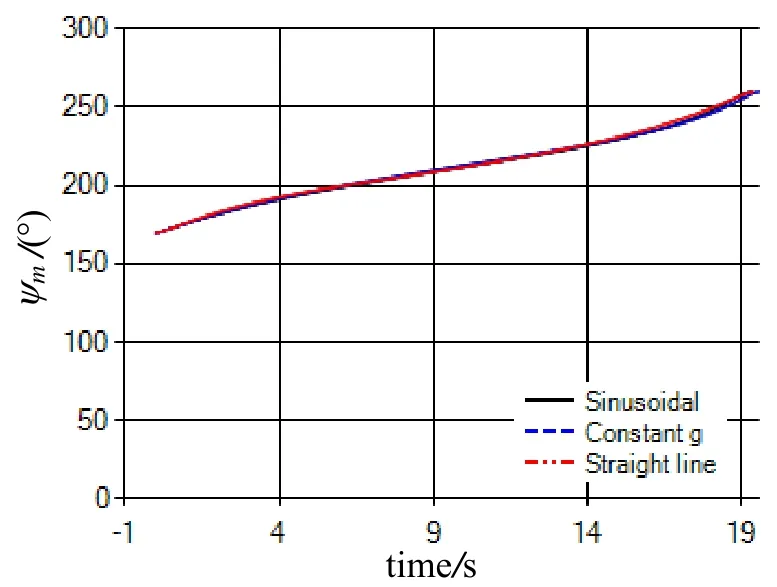
圖3 目標(biāo)機(jī)動方式不同彈道偏角變化曲線Fig.3 Time histories of ψmfor various target maneuvers
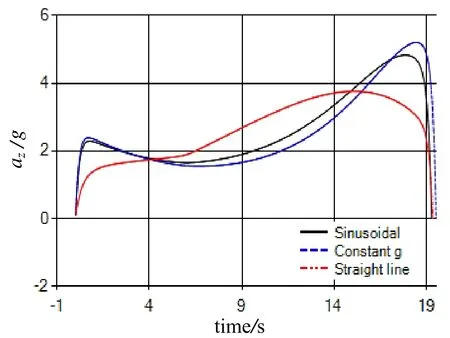
圖4 目標(biāo)機(jī)動方式不同法向過載az變化曲線Fig.4 Time histories of azfor various target maneuvers
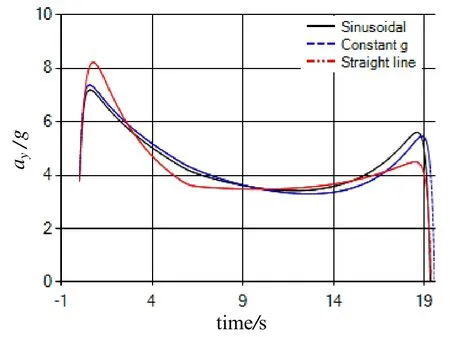
圖5 目標(biāo)機(jī)動方式不同法向過載ay變化曲線Fig.5 Time histories of ayfor various target maneuvers
3.2 不同末端落角約束數(shù)值仿真
本節(jié)研究G-MPSP算法在不同落角約束條件下的數(shù)值仿真。導(dǎo)彈末端時刻彈道傾角期望值為(-50°, -70°, -80°),彈道偏角期望值為(220°, 240°, 250°)。目標(biāo)作正弦機(jī)動,其它仿真條件參照3.1節(jié)。
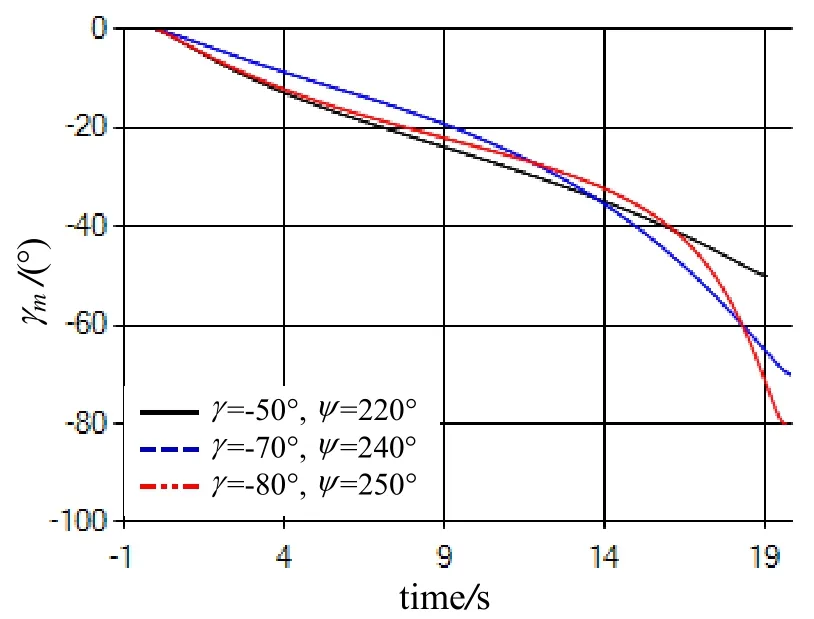
圖6 不同落角約束彈道傾角變化曲線Fig.6 Time histories of γmwith impact angle constraints
圖7 不同落角約束彈道偏角變化曲線Fig.7 Time histories of ψmwith impact angle constraints
圖8 不同落角約束法向過載az變化曲線Fig.8 Time histories of azwith impact angle constraints
迭代終止條件參照3.1節(jié)。仿真時,經(jīng)過6次迭代可以滿足各種末端約束。末端位移偏差均小于0.5 m。圖6和圖7分別為末端落角約束不同時導(dǎo)彈彈道傾角γm和偏角ψm的變化曲線,彈道傾角和偏角的偏差均可控制在0.01°范圍內(nèi)。圖8和圖9分別為導(dǎo)彈法向過載az和ay的變化曲線,末端時刻法向加速度az和ay的值均小于0.01 m/s2,末端時刻法向過載趨于零,即間接滿足末端彈體姿態(tài)角約束。但是,隨著末端落角約束的增大,法向過載在末端時刻的變化范圍隨著增大,這是由于大的末端落角約束需要比較大的法向過載對落角進(jìn)行調(diào)節(jié),而法向過載在末端時刻又必須滿足零值約束。
圖9 不同落角約束法向過載ay變化曲線Fig.9 Time histories of aywith impact angle constraints
4 結(jié) 論
本文針對帶有末端彈體姿態(tài)角約束的機(jī)動目標(biāo)三維非線性制導(dǎo)問題,設(shè)計(jì)了一種新的通用模型預(yù)測靜態(tài)規(guī)劃(G-MPSP)制導(dǎo)算法。通過對末端法向過載進(jìn)行零值約束,間接地滿足了末端彈體姿態(tài)角約束。
仿真驗(yàn)證了該算法的有效性。本文所給出的方法可以為工程領(lǐng)域帶有末端彈體姿態(tài)角約束的非線性制導(dǎo)問題研究提供參考。
[1] Kim M, Grider K V. Terminal guidance for impact attitude angle constrained flight trajectories[J]. IEEE Transactions on Aerospace and Electronic Systems, 1973, 9(6): 852-859.
[2] Lee C H, Tahk M J, Lee J I, et al. Generalized formulation of weighted optimal guidance laws with impact angle constraint[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1317-1322.
[3] Kim B S, Lee J G, Han H S, et al. Biased PNG law for impact with angular constraint[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1): 277-288.
[4] Harshal B O, Radhakant P. Impact angle-constrained suboptimal model predictive static programming guidance of air-to-ground missiles[J]. Journal of Guidance, Control and Dynamics, 2012, 35(1): 153-164.
[5] 魏鵬鑫, 荊武興, 高長生, 等. 具有落角約束的彈道導(dǎo)彈再入末制導(dǎo)律設(shè)計(jì)[J]. 哈爾濱工業(yè)大學(xué)學(xué)報, 2013, 45(9): 23-29. Wei Peng-xin, Jing Wu-xing, Gao Chang-sheng, et al. Design of the reentry terminal guidance law with constraint of impact angle for ballistic missile[J]. Journal of Harbin Institute of Technology, 2013, 45(9): 23-29.
[6] 周慧波, 宋申民, 劉海坤, 等. 具有攻擊角約束的非奇異終端滑模導(dǎo)引律設(shè)計(jì)[J]. 中國慣性技術(shù)學(xué)報, 2014, 22(5): 606-611. Zhou Hui-bo, Song Shen-min, Liu Hai-kun, et al. Nonsingular terminal sliding mode guidance law with impact angle constraint[J]. Journal of Chinese Inertial Technology, 2014, 22(5): 606-611.
[7] Dwivedi P N, Bhattacharya A, Padhi R, et al. Suboptimal mid-course guidance of interceptors for high speed targets with alignment angle constraint[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(3): 860-877.
[8] Gong Q, Fahroo F, Ross I M, et al. Spectral algorithm for pseudo spectral methods in optimal control[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(3): 460-471.
[9] 范金鎖, 張合新, 孟飛, 等. 基于反演高階滑模的飛行器最優(yōu)末制導(dǎo)律[J]. 中國慣性技術(shù)學(xué)報, 2012, 20(1): 29-33. Fan Jin-suo, Zhang He-xin, Meng Fei, et al. Optimal terminal guidance law for vehicle based on back stepping higher order sliding mode control[J]. Journal of Chinese Inertial Technology, 2012, 20(1): 29-33.
[10]Park B G, Kim T H, Tahk M J, et al. Optimal impact angle control guidance law considering the seeker’s field-of-view limits[J]. Proceedings of the Institution of Mechanical Engineers Part G-Journal of Aerospace Engineering, 2013, 227(8): 1347.
[11]Rusnak I, Weiss H, Eliav R, et al. Missile guidance with constrained terminal body angle[C]//IEEE 26thConvention of Electrical and Electronics Engineers in Israel. 2010: 45-49.
[12]Padhi R, Kothari M. Model predictive static programming: A computationally efficient technique for suboptimal control design[J]. International Journal of Innovative Computing, Information and Control, 2009, 5(2): 399-411.
[13]郭鵬飛, 佘浩平. 一種具有落角約束的非線性次優(yōu)制導(dǎo)律[C]//第32屆中國控制會議. 西安, 2013: 4910-4914. Guo Peng-fei, She Hao-ping. A nonlinear suboptimal guidance law with impact angle constraint[C]// Proceedings of the 32nd Chinese Control Conference. Xi’an, China, 2013: 4910-4914.
[14]Arnab M, Harshal B O, Radhakant P, et al. Generalized model predictive static programming and angleconstrained guidance of air-to-ground missiles[J]. Journal of Guidance, Control and Dynamics, 2014, 37(6): 1897-1913 .
Nonlinear guidance law with terminal body angle constraints
LI Xin-san1, WANG Li-xin1, YAN Xun-liang1, LIU Guo-hui2, WANG Ming-jian2, DING Bang-ping2
(1. Department 3, The Second Artillery Engineering University, Xi’an 710025, China; 2. Petty Officer Academy, The Second Artillery Engineering University, Qingzhou 262500, China)
In view of 3D nonlinear guidance problems with terminal multi-constraints, a guidance algorithm based on predictive static programming of a generalized model is designed. A key feature of the technique is backward propagation of weighted matrix dynamics, which is used to update the controlhistory and transfer dynamic optimization into static one with high computational efficiency. The basic principle of the technique is given, and the design of the guidance law is presented. The designed guidance law satisfies the terminal lateral-acceleration constraints, and hence indirectly satisfies the terminal body angle constraints. Various maneuvering accelerations and impact angles of targets are considered in simulations, and the results show that final miss displacement is less than 0.5 m, terminal impact angle errors are less than 0.01°, and terminal lateral accelerations are less than 0.01m/s2, adequately meeting the constraints of terminal displacement, impact angle, and lateral acceleration.
generalized model predictive static programming; guidance law; impact angle constraints; lateral acceleration constraints; body angle constraints
V448
A
1005-6734(2015)02-0232-06
10.13695/j.cnki.12-1222/o3.2015.02.017
2014-11-07;
2015-02-10
國家自然科學(xué)基金(61203354)
李新三(1982—),男,博士研究生,從事導(dǎo)航制導(dǎo)與仿真技術(shù)研究。E-mail:xinsan_2006@163.com
聯(lián) 系 人:汪立新(1966—),男,教授,博士生導(dǎo)師。E-mail:wanglixin066@sina.cn
