某型艦載單軸旋轉(zhuǎn)調(diào)制捷聯(lián)慣導(dǎo)姿態(tài)角誤差修正方法
2015-06-05 14:51:32周海淵趙李健王前學(xué)
中國(guó)慣性技術(shù)學(xué)報(bào) 2015年2期
周海淵,潘 良,趙李健,王前學(xué)
(中國(guó)衛(wèi)星海上測(cè)控部,江陰 214431)
某型艦載單軸旋轉(zhuǎn)調(diào)制捷聯(lián)慣導(dǎo)姿態(tài)角誤差修正方法
周海淵,潘 良,趙李健,王前學(xué)
(中國(guó)衛(wèi)星海上測(cè)控部,江陰 214431)
某型艦載單軸旋轉(zhuǎn)調(diào)制捷聯(lián)慣導(dǎo)在航天遠(yuǎn)洋測(cè)量船進(jìn)行了搭載試驗(yàn),以成熟的某型平臺(tái)式慣性導(dǎo)航系統(tǒng)為基準(zhǔn)進(jìn)行了性能比對(duì)分析,數(shù)據(jù)處理發(fā)現(xiàn)兩者姿態(tài)角之差伴隨著捷聯(lián)慣導(dǎo)單軸旋轉(zhuǎn)調(diào)制的角度存在較為明顯的階梯現(xiàn)象。捷聯(lián)慣導(dǎo)數(shù)據(jù)誤差源分析結(jié)果表明,單軸旋轉(zhuǎn)平臺(tái)不水平是引起上述現(xiàn)象的根本原因。針對(duì)上述情況,構(gòu)建姿態(tài)角誤差補(bǔ)償數(shù)學(xué)模型,采用最小二乘擬合方法對(duì)相關(guān)系數(shù)進(jìn)行了計(jì)算并修正了階梯現(xiàn)象,最后采用隨機(jī)數(shù)據(jù)對(duì)建模結(jié)果進(jìn)行了再次驗(yàn)證。研究結(jié)果表明基于最小二乘擬合的修正方法,消除了旋轉(zhuǎn)平臺(tái)不水平對(duì)單軸旋轉(zhuǎn)調(diào)制捷聯(lián)慣導(dǎo)姿態(tài)數(shù)據(jù)的影響,為后續(xù)設(shè)備的改進(jìn)提供了方向。
捷聯(lián)慣導(dǎo);單軸旋轉(zhuǎn)調(diào)制;階梯效應(yīng);姿態(tài)修正;最小二乘方法
航天測(cè)量船執(zhí)行海上測(cè)控任務(wù)對(duì)目標(biāo)實(shí)施外測(cè)定軌,慣性導(dǎo)航系統(tǒng)提供的姿態(tài)信息是影響其測(cè)控精度的關(guān)鍵因素。慣性導(dǎo)航系統(tǒng)分為平臺(tái)式和捷聯(lián)式兩類,目前測(cè)量船以平臺(tái)式慣導(dǎo)為主要設(shè)備。從慣性導(dǎo)航系統(tǒng)的發(fā)展現(xiàn)狀可以看出,捷聯(lián)式慣導(dǎo)經(jīng)濟(jì)實(shí)惠、體積小巧、標(biāo)校方便、精度更高,已經(jīng)逐步取代傳統(tǒng)的平臺(tái)式慣導(dǎo)成為多數(shù)應(yīng)用領(lǐng)域的主流[1-3]。由于航天測(cè)量船對(duì)姿態(tài)角精度要求很高,使用單純的捷聯(lián)式慣導(dǎo)很難滿足要求,而采用單軸旋轉(zhuǎn)調(diào)制方案可有效提高捷聯(lián)式慣導(dǎo)系統(tǒng)姿態(tài)角精度。
伴隨著國(guó)內(nèi)捷聯(lián)慣導(dǎo)的迅速發(fā)展和海上測(cè)控任務(wù)對(duì)高精度姿態(tài)測(cè)量的需求,多個(gè)捷聯(lián)式慣導(dǎo)生產(chǎn)單位在航天測(cè)量船進(jìn)行了設(shè)備搭載試驗(yàn)。某型單軸旋轉(zhuǎn)調(diào)制激光陀螺捷聯(lián)慣導(dǎo)(以下簡(jiǎn)稱SINS)搭載試驗(yàn)數(shù)據(jù)分析發(fā)現(xiàn),其姿態(tài)數(shù)據(jù)誤差存在與設(shè)備單軸臺(tái)體旋轉(zhuǎn)調(diào)制角度相關(guān)的階梯現(xiàn)象。本文對(duì)該現(xiàn)象產(chǎn)生的機(jī)理進(jìn)行了分析,針對(duì)性設(shè)計(jì)了合理的誤差補(bǔ)償方案。
1 捷聯(lián)慣導(dǎo)搭載試驗(yàn)
本次搭載試驗(yàn)包括以下設(shè)備:某型SINS一套;某型雙頻GPS接收機(jī)一套,為SINS提供實(shí)時(shí)位置、速度、時(shí)間信息;某型平臺(tái)式慣導(dǎo)(以下簡(jiǎn)稱INS),為SINS提供姿態(tài)比對(duì)參考;某型光學(xué)經(jīng)緯儀,為SINS提供航向比對(duì)基準(zhǔn)。各設(shè)備安裝示意圖如圖1所示。

圖1 捷聯(lián)慣導(dǎo)搭載試驗(yàn)設(shè)備安裝示意圖Fig.1 The setting about SINS in the experiment
該型號(hào)SINS采用0°、180°、270°、90°四位置轉(zhuǎn)停方案。將INS與SINS的姿態(tài)數(shù)據(jù)進(jìn)行做差,結(jié)果如圖2所示。從試驗(yàn)數(shù)據(jù)分析,不難得出INS與SINS姿態(tài)數(shù)據(jù)做差后存在與設(shè)備單軸臺(tái)體旋轉(zhuǎn)調(diào)制角度相關(guān)的階梯現(xiàn)象。INS為已經(jīng)成熟的設(shè)備,多次應(yīng)用于海上測(cè)控任務(wù),因此在姿態(tài)角做差比對(duì)中產(chǎn)生的上述現(xiàn)象應(yīng)該與SINS本身有關(guān)。
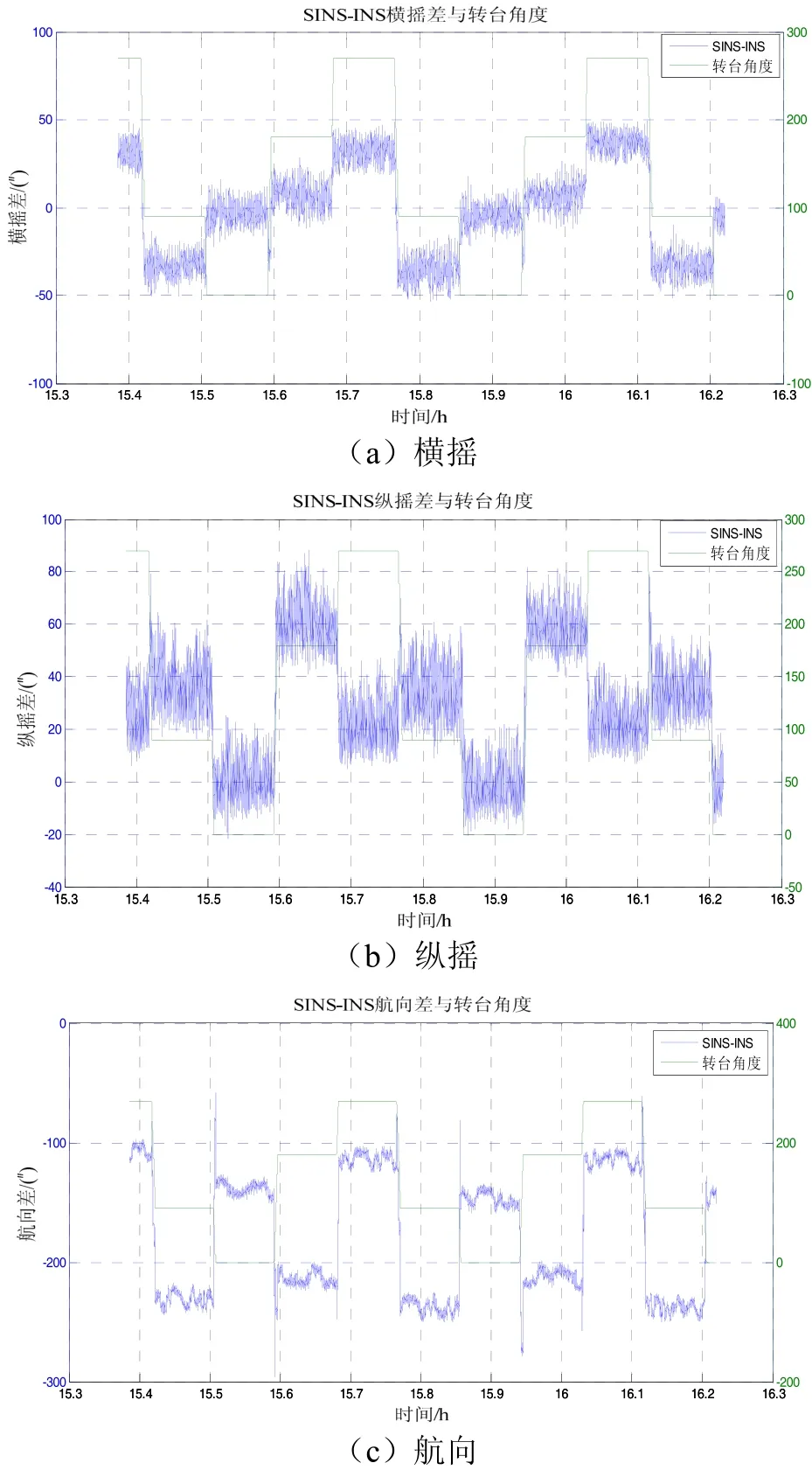
圖2 SINS與INS姿態(tài)角做差結(jié)果Fig.2 Attitude data error of INS and SINS
2 捷聯(lián)慣導(dǎo)姿態(tài)數(shù)據(jù)誤差分析
2.1 捷聯(lián)慣導(dǎo)姿態(tài)數(shù)據(jù)誤差源
影響SINS測(cè)量精度的誤差因素很多,大致可以分為四類:慣性器件誤差、電路誤差、機(jī)械誤差和計(jì)算誤差[4-6]。
① 慣性器件誤差:慣性器件誤差是指慣性器件本身的誤差,包括激光陀螺和加速度計(jì)的零偏、比例因子、誤差和隨機(jī)噪聲等。慣性器件誤差通常是捷聯(lián)慣導(dǎo)系統(tǒng)的主要誤差。
② 電路誤差:電路誤差主要包括兩個(gè)方面,一是陀螺和加速度電路的隨機(jī)噪聲引起的誤差,二是信號(hào)處理電路進(jìn)行量化處理產(chǎn)生的量化誤差。該誤差不會(huì)隨時(shí)間積累。
③ 機(jī)械誤差:機(jī)械誤差主要包括陀螺儀、加速度計(jì)、單軸旋轉(zhuǎn)平臺(tái)安裝等機(jī)械設(shè)備安裝引起的誤差。陀螺和加速度計(jì)誤差可以通過(guò)標(biāo)定補(bǔ)償,單軸旋轉(zhuǎn)平臺(tái)安裝誤差也可以通過(guò)標(biāo)定后補(bǔ)償。
④ 計(jì)算誤差:計(jì)算誤差主要包括計(jì)算機(jī)有限字長(zhǎng)引起的舍入誤差和姿態(tài)解算算法誤差。相對(duì)于其它誤差而言,計(jì)算誤差為小量。
本次SINS搭載試驗(yàn)選用的激光陀螺和加速度計(jì)性能穩(wěn)定,精度較高,依據(jù)慣性器件誤差、電路誤差、計(jì)算誤差的特性,不會(huì)引起INS與SINS姿態(tài)數(shù)據(jù)做差后存在明顯的與轉(zhuǎn)臺(tái)角度相關(guān)的階梯效應(yīng)。由于姿態(tài)角誤差與轉(zhuǎn)臺(tái)角度緊密關(guān)聯(lián),根據(jù)這一特殊現(xiàn)象,單軸旋轉(zhuǎn)平臺(tái)不水平應(yīng)該是引起該現(xiàn)象的主要因素。
2.2 捷聯(lián)慣導(dǎo)姿態(tài)數(shù)據(jù)誤差與轉(zhuǎn)臺(tái)角度
該型號(hào)SINS臺(tái)體轉(zhuǎn)角的角度范圍為0°~270°,SINS與INS姿態(tài)角的差值與轉(zhuǎn)臺(tái)角度關(guān)系如圖3所示。從圖3中可見(jiàn),橫搖差和縱搖差與轉(zhuǎn)臺(tái)角度表現(xiàn)出明顯的三角函數(shù)特性;而航向差則除了與轉(zhuǎn)臺(tái)角度有某種三角函數(shù)關(guān)系外,還與轉(zhuǎn)臺(tái)的正轉(zhuǎn)、反轉(zhuǎn)有關(guān),表現(xiàn)出一定的齒隙特性。

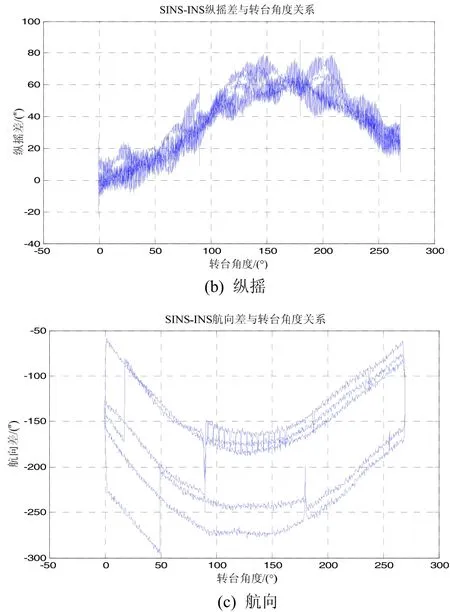
圖3 INS-SINS姿態(tài)角差與轉(zhuǎn)臺(tái)角度關(guān)系Fig.3 INS-SINS attitude data vs. rotation angle of rotary platform
3 捷聯(lián)慣導(dǎo)姿態(tài)數(shù)據(jù)誤差補(bǔ)償
3.1 水平姿態(tài)誤差參數(shù)估計(jì)與補(bǔ)償效果
根據(jù)圖3(a)中的橫搖差與轉(zhuǎn)臺(tái)角度曲線,按周期函數(shù)參數(shù)估計(jì)方法,可建立如下的誤差補(bǔ)償數(shù)學(xué)模型:

式中:ΔR為橫搖誤差,R0為曲線中的常值分量,AR為幅值,ΦR為初始相位。式(1)可改寫為:

式中:aR=ARcosφR,bR=ARcosφR。對(duì)于式(2)只需要獲取三個(gè)Kp對(duì)應(yīng)的ΔR值即可確定R0、aR、bR三個(gè)參數(shù);如果多于三個(gè)點(diǎn),可采用最小二乘法擬合。
采用臺(tái)體0°、180°、270°、90°四個(gè)轉(zhuǎn)位的姿態(tài)角差平均值作為觀察量,以R0、aR、bR作為待估參數(shù)寫成矩陣形式:
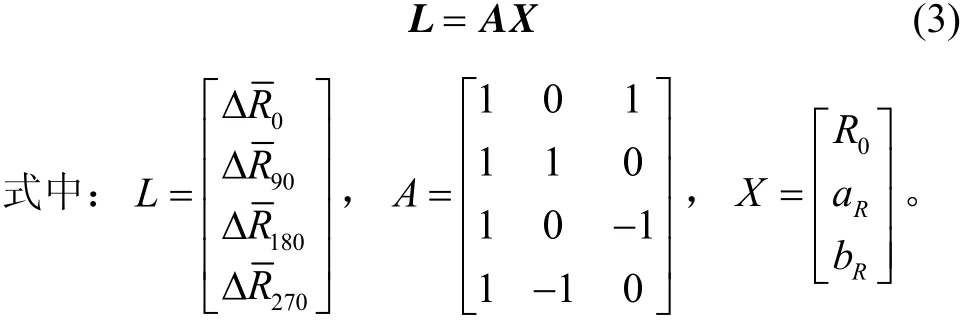
式(3)的最小二乘解為:

采用同樣的方法可以確定縱搖的三個(gè)參數(shù)P0、aP、bP,根據(jù)圖2(a)、圖2(b)中的曲線數(shù)據(jù)分別對(duì)橫搖差、縱搖差曲線的參數(shù)估計(jì)結(jié)果見(jiàn)表1。
利用以上參數(shù),對(duì)2(a)、圖2(b)曲線中的數(shù)據(jù)進(jìn)行誤差補(bǔ)償,結(jié)果見(jiàn)圖4,從圖中可見(jiàn)階梯現(xiàn)象已消除。為了驗(yàn)證利用以上方法估計(jì)參數(shù)的普適性,對(duì)其它時(shí)間段SINS數(shù)據(jù)進(jìn)行驗(yàn)證,效果良好,見(jiàn)圖5。
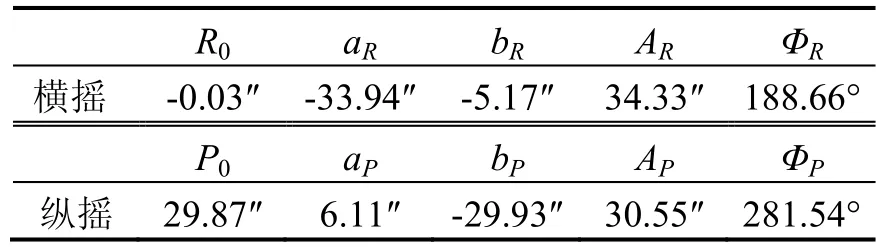
表1 SINS水平姿態(tài)誤差參數(shù)估計(jì)結(jié)果Tab.1 Horizontal attitude error correction of SINS
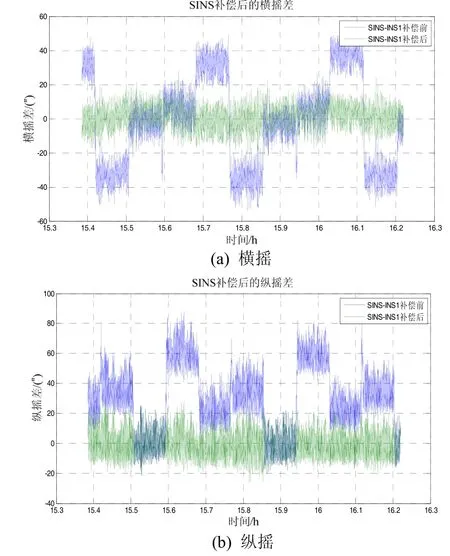
圖4 補(bǔ)償后的SINS姿態(tài)差誤差曲線Fig.4 Horizontal attitude data after correction
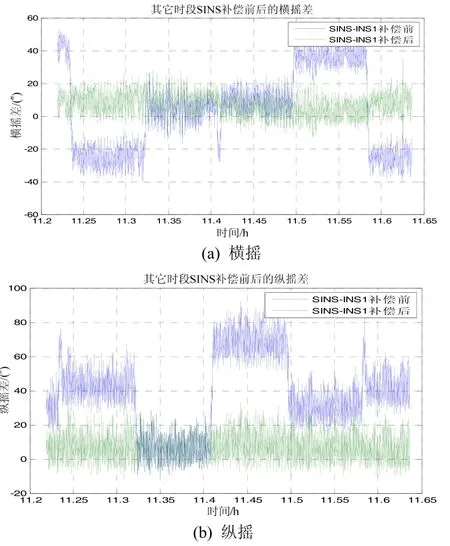
圖5 其它時(shí)間段SINS水平姿態(tài)誤差補(bǔ)償效果驗(yàn)證Fig.5 Horizontal attitude data after correction picked up by random
3.2 航向誤差參數(shù)估計(jì)與補(bǔ)償效果
對(duì)于航向數(shù)據(jù),可以采用水平姿態(tài)角相同的方法進(jìn)行參數(shù)估計(jì)。由于航天測(cè)量船使用經(jīng)緯儀作為航向基準(zhǔn),采用INS作為水平姿態(tài)基準(zhǔn),因此SINS航向修正與水平姿態(tài)修正補(bǔ)償略有不同,航向誤差補(bǔ)償參數(shù)中的常值分量沒(méi)有實(shí)際意義不需要補(bǔ)償。

表2 SINS航向誤差參數(shù)估計(jì)結(jié)果Tab.2 Course attitude error correction of SINS
補(bǔ)償后航向差曲線如圖6(a)所示,階梯現(xiàn)象已消失,但在轉(zhuǎn)臺(tái)旋轉(zhuǎn)過(guò)程中的航向數(shù)據(jù)存在大小約40″的毛刺。分析發(fā)現(xiàn)毛刺方向與轉(zhuǎn)臺(tái)角速度方向相反,如圖6(b)所示,利用轉(zhuǎn)臺(tái)角速度再乘一定系數(shù)對(duì)航向數(shù)據(jù)進(jìn)一步補(bǔ)償,效果如圖7所示,毛刺和階梯現(xiàn)象基本消失。
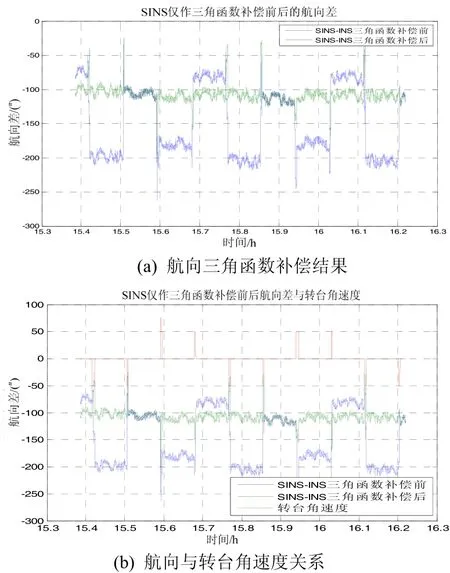
圖6 SINS航向僅做三角函數(shù)補(bǔ)償Fig.6 Course attitude data after trigonometric function correction
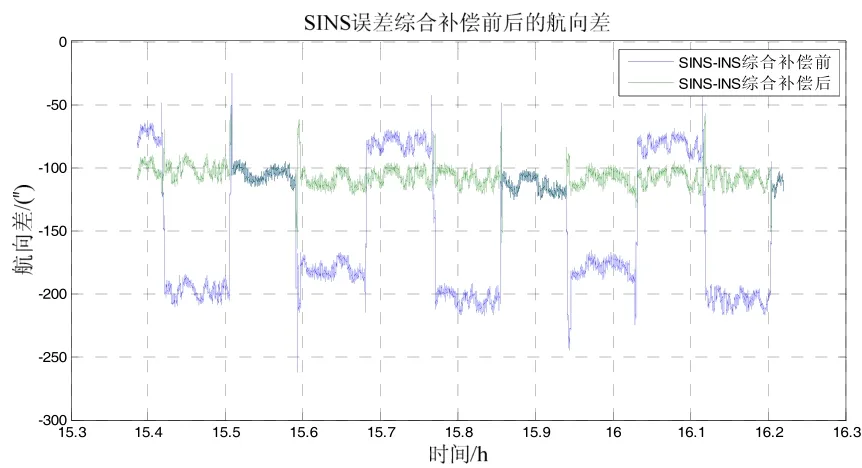
圖7 SINS航向綜合補(bǔ)償效果Fig.7 Course attitude data after integrated correction
為了驗(yàn)證利用以上方法估計(jì)參數(shù)的普適性,對(duì)其它時(shí)間段SINS數(shù)據(jù)進(jìn)行驗(yàn)證,效果良好,見(jiàn)圖8。
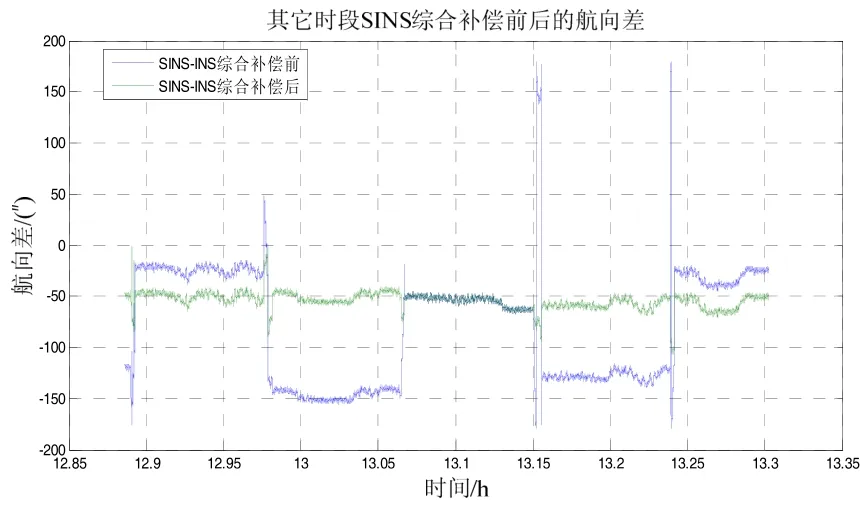
圖8 其它時(shí)間段SINS航向誤差綜合補(bǔ)償效果驗(yàn)證Fig.8 Course attitude data after correction picked up by random
4 結(jié) 論
從某型SINS搭載試驗(yàn)中發(fā)現(xiàn),姿態(tài)數(shù)據(jù)誤差存在與設(shè)備單軸臺(tái)體旋轉(zhuǎn)調(diào)制角度相關(guān)的階梯現(xiàn)象,通過(guò)誤差源分析SINS單軸旋轉(zhuǎn)臺(tái)體不水平是引起該現(xiàn)象的主要因素。本文在對(duì)姿態(tài)誤差數(shù)據(jù)分析中發(fā)現(xiàn),該誤差與臺(tái)體旋轉(zhuǎn)調(diào)制角度存在特定三角函數(shù)關(guān)系。通過(guò)最小二乘擬合方法對(duì)數(shù)學(xué)模型各系數(shù)進(jìn)行了計(jì)算并修正了階梯現(xiàn)象,最后用隨機(jī)數(shù)據(jù)對(duì)建模結(jié)果進(jìn)行了再次驗(yàn)證。數(shù)據(jù)處理結(jié)果表明相關(guān)模型系數(shù)可以作為固定參數(shù)對(duì)該型SINS姿態(tài)數(shù)據(jù)進(jìn)行修正。相關(guān)方法為該型設(shè)備的進(jìn)一步改進(jìn)提供了新的方向。
(References):
[1] 于飛, 翟國(guó)富, 高偉, 等. 艦船捷聯(lián)慣導(dǎo)粗對(duì)準(zhǔn)方法研究[J]. 傳感器與微系統(tǒng), 2009, 28(5): 15-18. Yu Fei, Zhai Guo-fu, Gao Wei, et al. Research on coarse alignment for vessel strapdown inertial navigation system [J]. Transducer and Microsystem Technologies, 2009, 28(5): 15-18.
[2] 龍興武, 于旭東, 張鵬飛, 等. 激光陀螺單軸旋轉(zhuǎn)慣性導(dǎo)航系統(tǒng)[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2010, 18(2): 149-153. Long Xin-wu, Yu Xu-dong, Zhang Peng-fei, et al. Single-rotating inertial navigation system with ring laser gyroscope[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 149-153.
[3] Nie Qi, Gao Xiao-ying, Liu Zhun. Research on accuracy improvement of INS with continuous rotation[C]// Proceedings of the 2009 IEEE International Conference on Information and Automation. 2009: 870-874.
[4] Cheng Jian-hua, Guan Dong-xue, Ben Xu-dong, et al. Design of simulation and verification system for rotation strapdowm inertial navigation system[C]//IEEE International Conference on Mechatronics and Automation. 2012: 865-869.
[5] Ben Yuei-yang, Wu Xiao. Research on error modulating of SINS based on single-axis rotation[C]//IEEE International Conference on Complex Medical Engineering, 2011: 293-297.
[6] Zhao Ling, Lai Ji-zhou, Liu Jia-ye, et al. Computation structure of rotating strapdown INS[J]. Journal of Chinese Inertial Technology, 2013, 21(1): 10-15.
Attitude error correction method for a shipboard single-shaft rotation modulation SINS
ZHOU Hai-yuan, PAN Liang, ZHAO Li-jian, WANG Qian-xue
(China Satellite Maritime Tracking & Controlling Department, Jiangyin 214431, China)
A ship-borne single-shaft rotary modulation SINS was tested on an aerospace oceangoing survey ship. By compared with a mature platform inertial navigation system, the data processing shows that the attitude errors have stepped behavior which is correlated with the SINS single-axis rotary modulation angle. The analysis on the error source of SINS data shows that it is due to the single-shaft rotary platform’s non-level. Then an attitude angle error compensation mathematical model is constructed, the correlation coefficient is calculated based on least square method, and the step phenomenon is corrected. Finally, the model is re-verified by using the random data. Experiment results show that the proposed method can eliminate the influence of single-shaft rotary platform’s non-level on the SINS attitude data, which provides a new way to improve the equipment’s performance.
SINS; single-shaft rotation modulation; step effect; attitude correction; least square method
U666.1
A
1005-6734(2015)02-0156-04
10.13695/j.cnki.12-1222/o3.2015.02.004
2014-08-20;
2014-12-17
周海淵(1982—),男,工程師,從事慣性導(dǎo)航設(shè)備應(yīng)用研究。E-mail:lynn9527@gmail.com
 中國(guó)慣性技術(shù)學(xué)報(bào)2015年2期
中國(guó)慣性技術(shù)學(xué)報(bào)2015年2期
- 中國(guó)慣性技術(shù)學(xué)報(bào)的其它文章
- 基于改進(jìn)型灰色預(yù)測(cè)模型的SINS/GPS組合導(dǎo)航系統(tǒng)
- 強(qiáng)跟蹤-容積卡爾曼濾波在彈道式再入目標(biāo)跟蹤中的應(yīng)用
- 基于熵值法賦權(quán)灰色關(guān)聯(lián)決策的地形輔助導(dǎo)航適配區(qū)選擇
- 基于單軸旋轉(zhuǎn)INS/GPS組合姿態(tài)誤差觀測(cè)的垂線偏差測(cè)量方法
- 高精度慣性平臺(tái)十六位置自標(biāo)定方案
- 基于光學(xué)自準(zhǔn)直技術(shù)的導(dǎo)航系統(tǒng)姿態(tài)輸入輸出方法