Improved fast backtracking alignment approach for strapdown inertial navigation system
2015-06-05 14:51:32HEHongyangXUJiangningLIJingshuLIFengZHAFeng
中國慣性技術學報 2015年2期
關鍵詞:方法
HE Hong-yang, XU Jiang-ning, LI Jing-shu, LI Feng, ZHA Feng
(Department of Navigation, Navy University of Engineering, Wuhan 430033, China)
Improved fast backtracking alignment approach for strapdown inertial navigation system
HE Hong-yang, XU Jiang-ning, LI Jing-shu, LI Feng, ZHA Feng
(Department of Navigation, Navy University of Engineering, Wuhan 430033, China)
Rapidity is vital important for initial alignment of strapdown inertial navigation system (SINS). Backtracking algorithm can effectively reduce the alignment time by repeatedly using the recorded measurements of gyros and accelerometers. In order to further improve the rapidity, a fast backtracking alignment approach (FBA) was designed. An optimization-based alignment approach was employed during coarse alignment stage to provide more accurate initial attitude for the fine alignment of backtracking gyrocompass, so as to improve the rapidity of the gyrocompass loop’s convergence. The fundamental principle of backtracking algorithm was analyzed, and the implementation process of the FBA was designed. Experiment results show that the proposed algorithm can greatly reduce the execution times of backtracking and the data volume in alignment, further improving the rapidity of alignment.
strapdown INS; initial alignment; backtracking alignment approach; rapid alignment
The alignment of strapdown inertial navigation system is by using the measurements from the accelerometers and gyroscopes to determine the orientation of the body frame with respect to a reference frame[1-5]. The Alignment process is divided into two parts: coarse alignment and fine alignment. Coarse alignment is an analytical alignment which suffers from a lack of precision as measurement errors and other noise sources are not considered. It does, however, estimate the attitude and heading accurately enough to justify the small angle approximations made in the error model. Nowadays, there are two main methods of self-alignment: Kalman filtering fine alignment with the result from the analytic coarse alignment; and gyrocompass alignment techniques. The contradiction between rapidity and high-precision exists in both of the above approaches. In order to solve this problem, a backtracking gyrocompass alignment approach is proposed[6-9], in which the measurements ofgyros and accelerometers within a short time are recorded for repeated calculation, so as to minimize the alignment time. However, the coarse alignment error of gyrocompass alignment is relatively large. So the gyrocompass loop converges slowly. The volume of the recorded data and execution times of backtracking calculation need to be large enough to achieve high- precision alignment. An optimization-based alignment approach is proposed in [10] and [11]. It is considered to be a coarse alignment because the process only determines the attitude matrix without estimating the errors of the sensor, but it possesses the advantages of rapidity and can guarantee quite a high accuracy[12]. Another advantage of this approach is that the three attitude angles gradually converge at the same time. However, there exists slowly climbing trends in level angles as well as the biased yaw in the algorithm, which are owed to the existence of gyro/accelerometer biases that has not been taken into account.
This paper proposes a fast backtracking alignment approach based on the optimization-based coarse alignment and backtracking gyrocompass alignment. The coarse alignment based on optimization-based alignment algorithm is carried out by using a small amount of recorded measurements of gyros and accelerometers. Within this stage, three attitude angles converge rapidly to the accurate values. Then, an accurate alignment is achieved based on the backtracking gyrocompass approach. Compared with traditional alignment approaches, the proposed algorithm can greatly reduce the alignment time. Compared with the backtracking gyrocompass alignment, the proposed algorithm can effectively reduce the execution times of backtracking and the volume of the data that has to be recorded for backtracking.
1 Backtracking navigation algorithm
Denote by n the local level navigation frame, an orthogonal reference frame aligned with north–east–down (NED) geodetic axes; by b the SINS body frame, an orthogonal reference frame aligned within the IMU axes; by e the Earth frame, an Earth-centered Earthfixed (ECEF) orthogonal reference frame; by i the chosen inertial frame.
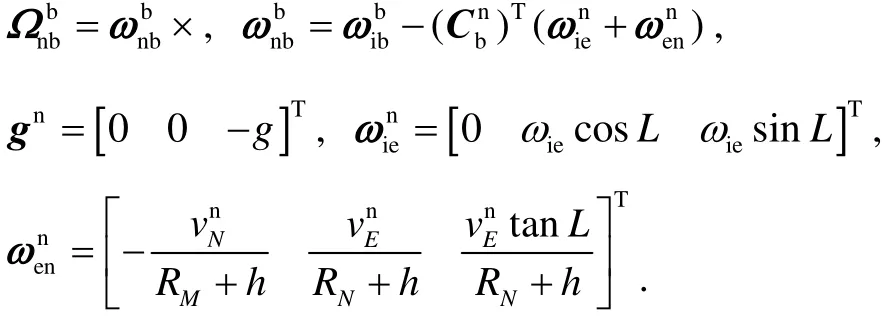
The navigation (attitude, velocity and position) rate equations in the n-frame are respectively known as:

Where,
Thus, the attitude, velocity and position updating can be presented respectively as follows:
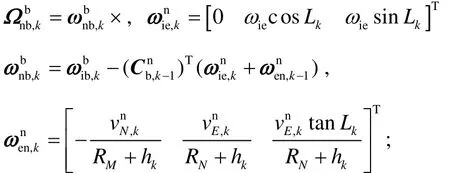
Attitude updating:

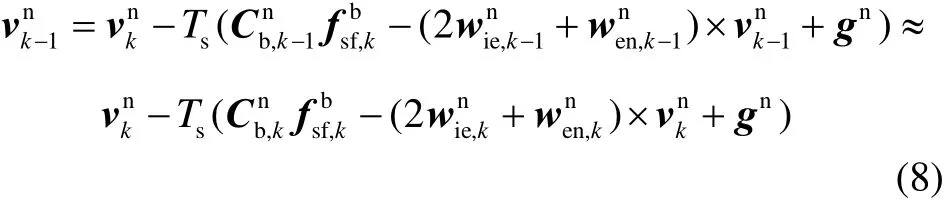
Velocity updating:

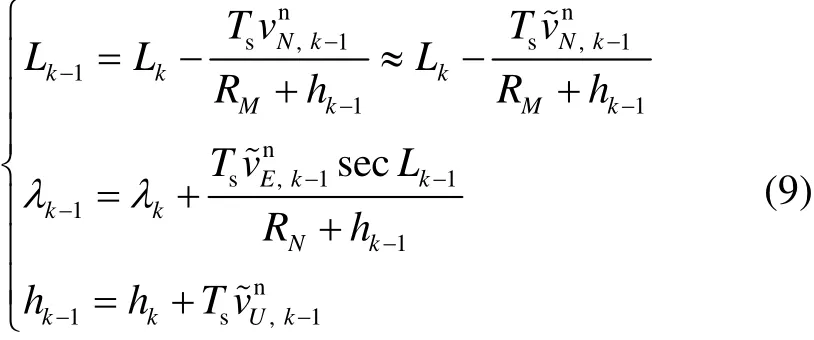
Position updating:
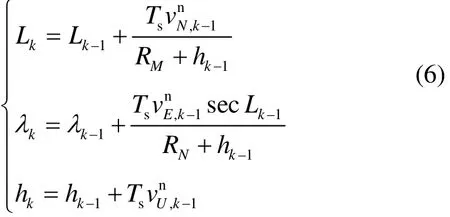
Where,
Tsdenotes the SINS sampling period.
Assume that SINS navigates from point A to point B and the measurements of gyros and accelerometers are recorded. In order to navigate from point B to point A using the recorded data, the backtracking updating process can be rearranged and presented as follows:
Attitude updating:

Velocity updating:
Position updating:
Where,
Denote:
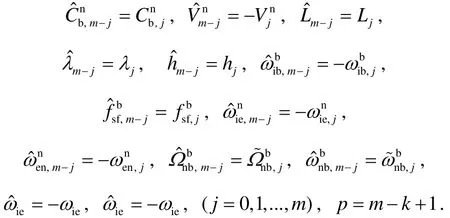
Rearrange equation (7)(9).
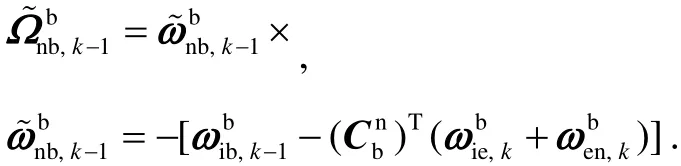
Attitude updating:

Velocity updating:

Position updating:
Where,
Through the above analysis, it can be concluded that, by negating the measurements of gyros and← the Earth rotation rate, setting the initial values asand reversing the recorded measurements of gyros and accelerometers, navigating from B point (at tm) to A point ( at t0) can be achieved.
2 Improved fast backtracking alignment
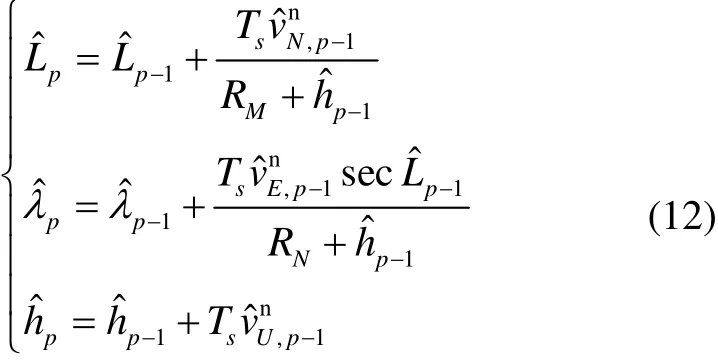
The coarse alignment error of gyrocompass alignment is relatively large. So the gyrocompass loop converges slowly. The volume of the recorded data and execution times of backtracking calculation need to be large enough to achieve high-precision alignment. In order to improve the rapidity and precision of the coarse alignment, an optimized-based alignment algorithm is employed, whose main idea can be described as follows.
The navigation (attitude, velocity and position) rate equations are presented in equation (1)(3). Suppose the alignment process starts from t=0. Given the measured velocity vnand position p over the time interval with the purpose to determine the attitude matrix, which at any time satisfies


So the optimization-based alignment focuses on determining. Substituting (13) into (2) yields


Integrating (15) on both sides:
The velocity integration formula can be presented as

Where,
Note the four elements unit quaternion q=[sηT]Tis used to encode the initial body attitude matrix, where s is the scalar part, and η is the vector part. The relationship between these two rotation parameters is

Define the quaternion multiplication matrices by

Then (16) is equivalent to
And the determination of the attitude quaternion can be posed as a constrained optimization, subject to qTq=1. Where the 4×4 real symmetric matrix

It can be proved that the optimal quaternion is exactly the normalized eigenvector of K belonging to the smallest eigenvalue. Then, the attitude matrixat any time can be determined by using the(0).
Comparing with the traditional analytical and inertial frame coarse alignment, the optimization-based alignment uses more observations and possesses the advantages of rapidity and can guarantee quite a high accuracy. The optimization-based alignment is employed as the coarse alignment approach in fast backtracking alignment algorithm proposed in this paper. As the precision of the coarse alignment is very high, the execution times of backtracking and the volume of recorded data need for gyrocompass backtracking alignment can be reduced, thus the rapidity of alignment will be further improved and the computational cost of navigation computer is decreased greatly.
3 Experimental results
This section reports our experimental results by examining a real SINS consisting of three fibre optical gyroscopes (FOG) with drift rate 0.01 (°)/s and three quartz accelerometers with bias 5×10-4m/s2at output rate 10 Hz. The FOG SINS was installed on a doubleaxis turntable, as shown in Fig.2.
In order to evaluate the accuracy of alignment, we needed a criterion for comparison. Thus we ensured that the turntable had a highly accurate level through a level meter and an exact heading through an optical theodolite.
Fig.1 IMU of FOG strapdown INS

Fig.2 IMU on turntable
The parameters were as follows: attitude of IMU is [pitch, roll, yaw] =[ 0°, 0°, 36.8°], the sampling frequency is 10 Hz. The gyro and accelerometer measurements are collected for 300 s. Experiment with the proposed fast backtracking gyrocompass alignment (FBA) algorithm was carried out using the data from 0 s to 50 s. Two experiments with the backtracking gyrocompass alignment (BA) algorithm were carried out using the data from 0 s to 50 s and 0 s to 100 s respectively.
Fig.3 to Fig.6 compare the attitudes estimated by FBA algorithm and the BA algorithm. Fig.3 shows the roll angle. Fig.4 shows the pitch angle. Fig.5 and Fig.6 show the yaw angle. It is clearly shown that, when the data used for alignment last 50 s, the estimates of the Euler angles by FBA converged much faster that by BA. It means that the proposed algorithm can greatly decrease the execution times of backtracking and greatly decrease the computational cost. Even when the data used for BA increase to 100 s, the estimates of the Euler angles by FBA (using 50 s data) converged faster than that with BA (using 100 s data). It means that the proposed algorithm can effectively reduce the volume of the data that has to be recorded for alignment, thus therapidity of alignment will be further improved.
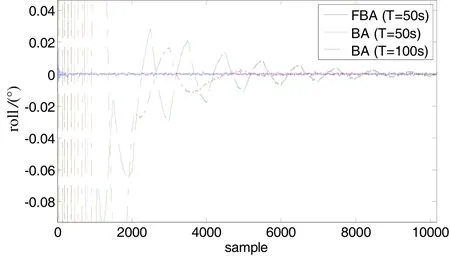
Fig.3 Estimates of roll
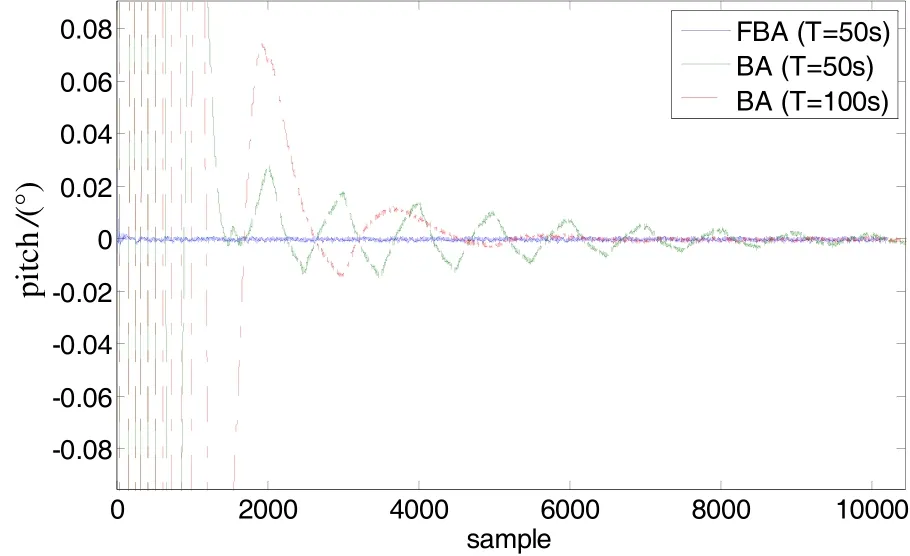
Fig.4 Estimates of pitch
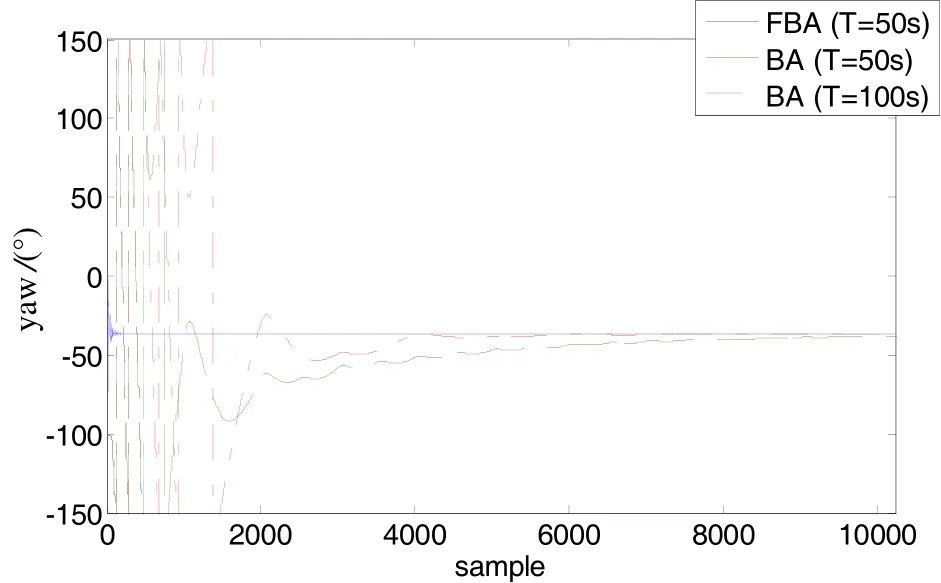
Fig.5 Estimates of yaw
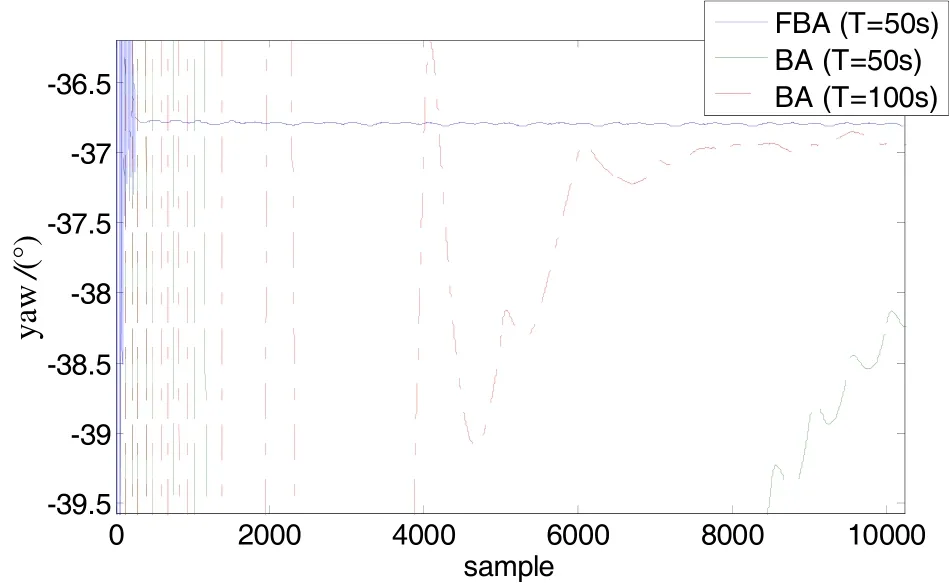
Fig.6 Partial enlarged yaw
4 Conclusions
In many applications, it is essential to achieve an accurate alignment for an inertial navigation system within a very short period of time. In this paper, a fast backtracking alignment approach (FBA) has been developed based on optimization-based coarse alignment and backtracking gyrocompass fine alignment for strapdown inertial navigation system. The backtracking algorithm is derived mathematically and the implementation process of FBA is designed. The effectiveness of the method has been verified by the measured data. Experimental results show that, comparing with the backtracking gyrocompass alignment proposed in [6], the proposed algorithm in this paper can greatly decrease the execution times of backtracking, so the computational cost will be decreased. And FBA can effectively reduce the volume of data that has to be recorded to guarantee the alignment precision, thus the rapidity of alignment will be further improved.
Reference:
[1] Titterton H D, Weston L J. Strapdown inertial navigation technology[M]. 2nded. The Institution of Electrical Engineers, 2004.
[2] Silson P G. Coarse alignment of a ship’s strapdown inertial attitude reference system using velocity loci[J]. IEEE transaction on instrument and measurement, 2011, 60: 1930-1941.
[3] QIN Y Y, Mei C B, Bai L. Error and calculation problem analysis of coarse alignment method with inertial frame for SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(6): 648-652.
[4] Qin Y Y, Yan G M, Gu D Q, Zheng J B. A clever way of SINS coarse alignment despite rocking ship[J]. Journal of Northwestern Polytechnical University, 2005, 23(5): 681-684.
[5] Sun W, Sun F, Lin Y. Research on rapid initial alignment of SINS with swaying motion[J]. Journal of System Simulation, 2013, 25(3): 681-684.
[6] Yan G M. On SINS in-movement initial alignment and some other problems[D]. Xi’an: Northwestern Polytechnical University, 2008.
[7] Li W L, Tang K H, Lu L Q, Wu Y L. Optimization-based INS in-motion alignment approach for underwater vehicles [J]. Optic, 2013, 124: 4581-4585.
[8] Li W L, Wu W Q, Wang J L, Lu L Q A. Fast SINS initial alignment scheme for underwater vehicle applications[J]. The Journal of Navigation, 2013, 66: 181-198.
[9] Qin F J, Li A, Xu J N. Improved fast alignment method of strapdown INS using bidirectional processes and denoising[J]. Journal of Chinese Inertial Technology, 2014, 22(4): 453-458.
[10] Wu M P, Wu Y X, Hu X P, Hu D W. Optimization-based alignment for inertial navigation systems: Theory and algorithm[J]. Aerospace Science and Technology, 2011, 15: 1-17.
[11] Wu Y X, Pan X F. Velocity/position integration formula Part I: Application to in-flight coarse alignment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49: 1006-1023.
[12] Li J S, Xu J N, Chang L B, Zha F. An improved optimal method for initial alignment[J]. The Journal of Navigation, 2014, 67: 727-736.
捷聯慣導系統改進回溯快速對準方法
何泓洋,許江寧,李京書,李 峰,查 峰
(海軍工程大學 導航工程系,湖北 武漢 430033)
快速性是捷聯慣導系統初始對準的一項重要指標。回溯算法通過存儲一段時間的陀螺儀和加速度計的數據,并反復加以利用的方式,有效縮短了對準的時間。為了進一步提高初始對準的快速性,設計了一種快速回溯對準方法(FBA)。優化對準方法被用于算法的粗對準階段,為回溯羅經法精對準提供較為準確的初始姿態,進而提高羅經回路的收斂速度。分析了回溯算法的基本原理,設計了快速回溯對準算法的實施過程。實驗結果表明,提出的算法能夠降低回溯次數,大大減少對準所需的數據量,使得對準的快速性進一步提高。
捷聯慣性導航系統;初始對準;回溯對準法;快速對準
U666.1
A
1005-6734(2015)02-0179-05
2014-12-09;
2015-03-28
國家重大科學儀器開發專項(2011YQ12004502);國家自然科學基金(41404002);海軍工程大學青年基金(HGDQNEQJJ13011)
何泓洋(1990—),男,博士研究生,從事慣性技術研究。E-mail:xgdhehongyang@163.com
10.13695/j.cnki.12-1222/o3.2015.02.008
聯 系 人:許江寧(1964—),男,教授,博士生導師。E-mail:xujiangning2005@163.com
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
