基于仿生智能優化RBF神經網絡的故障診斷①
2015-06-02 02:33:28敖培等
科技創新導報 2015年8期
關鍵詞:故障診斷
敖培等
摘 要:從鍋爐水循環系統當前工藝參數中辨別和判斷故障,可以使控制人員更全面地判斷當前生產狀態和預測未來情況,從而及時采取有效應對措施。該文提出一種基于仿生智能優化的RBF神經網絡用于水循環系統故障的診斷。即針對構造RBF神經網絡時隱相關參數難以確定的問題,該文提出采用混合蛙跳聚類算法確定隱層節點數,采用混合粒子群算法確定c和σ,使用最小二乘法(LMS)計算ω。通過實例驗證,采用該文方法可以準確的診斷鍋爐水循環系統的故障。
關鍵詞:混合蛙跳 算法 混合粒子群算法 故障診斷
中圖分類號:TM715 文獻標識碼:A 文章編號:1674-098X(2015)03(b)-0046-01
RBF神經網絡是一種三層前向型網絡,通常包括輸入層、隱含層和輸出層,能實現輸入層到隱含層的非線性映射和隱含層到輸出層的線性映射。可以在基函數的作用下,對靠近基函數中央范圍的輸入信號產生影響。針對在確定一個RBF神經網絡時,隱層節點數、數據中心c、寬度σ和隱層到輸出層的連接權值向量ω難以確定的問題,該文提出一種基于仿生智能優化的RBF神經網絡用于水循環系統故障的診斷,并將該文算法應用在鍋爐水循環系統故障診斷中取得了很好的效果。
1 基于SFLA聚類算法的RBF隱層節點確定
該文采用混合蛙跳(Shuffled frog-leaping algorithm,SFLA)[1]聚類算法確定隱層節點數,算法步驟如下:
(1)種群的初始化。給定模因組數目m、模因組中青蛙的最大進化次數M、聚類數目k,對于第i只青蛙Frog(i),先將每個樣本隨機指派為某一類作為最初的聚類劃分,并計算各類的聚類中心作為青蛙i的位置編碼Frog(i)·location[],計算青蛙的適應度值Frog(i)·fitness,反復進行,生成N只青蛙。
(2)將N只青蛙按適應度值降序排列并按照分組算子將N只青蛙分給m個模因組。
(3)每個模因組中的位置最差青蛙執行局部位置更新算子。
(4)各個模因組中的所有青蛙重新混合,組成數量為N只青蛙的總群體。
(5)對新的青蛙群體,更新種群中最好位置的青蛙Fg。
(6)判斷終止條件是否滿足,如果滿足,結束迭代,聚類數即為隱層節點數;否則轉向(2)繼續執行。
2 基于混合粒子群算法優化RBF神經網絡
該文采用混合粒子群算法確定RBF神經網絡c和σ,使用最小二乘法(LMS)計算ω。具體算法步驟如下:
(1)初始化粒子群,隨機產生所有粒子的位置和速度,初始化適應度值、粒子的最優位置和整個粒子群的最優位置。
(2)根據當前粒子的位置(網絡的c和σ),并采用LMS得到連接權值,并計算出粒子對所有訓練樣本的適應度值。
(3)將當前粒子適應值與該粒子所經歷過的最優位置的適應值進行比較,如較好,則將其作為當前的最優位置;將當前粒子適應值與整個粒子群所經歷過的最優位置的適應值進行比較,如較好,則將其作為當前整個粒子群的最優位置。
(4)采用個體最優交叉操作把個體和個體最優粒子進行交叉得到新粒子。
(5)采用群體最優交叉操作把個體和群體最優粒子進行交叉得到新粒子。
(6)采用粒子變異操作將粒子自身變異得到新粒子。
(7)如果沒有滿足終止條件,則返回(2);否則,退出算法,得到最優解,即網絡的c和σ值。
3 基于仿生智能優化RBF神經網絡的故障診斷
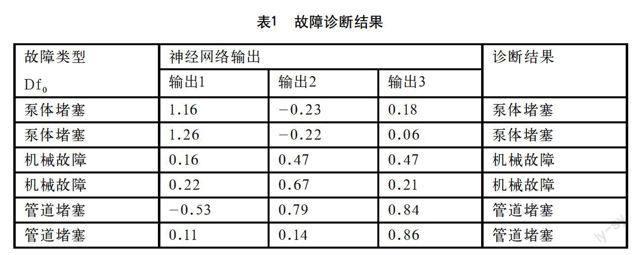
水循環系統是鍋爐系統中的一個控制單元,用于對鍋爐的用水供給和冷卻[2]。水循環系統故障類型主要有泵體堵塞、機械故障和管道堵塞三種。采集與故障相關的參數包括進口壓力、出口壓力、出流量、軸承溫度和電機電流。每種故障分別取5組數據構成樣本訓練集,取2組數據構成測試集。采用該文第2節和第3節方法確定RBF神經網絡結構,并用優化后的神經網絡對水循環系統故障進行診斷。初始青蛙數目為60,模因組數為4,最大迭代次數為2;粒子群規模為100,最大迭代次數為100。RBF神經網絡輸出及故障診斷結果如表1所示。從表1中可以看出,采用本文方法可以準確的診斷水循環系統的故障。
4 結語
該文提出一種基于仿生智能優化的RBF神經網絡用于水循環系統故障的診斷,即采用混合蛙跳聚類算法確定隱層節點數,采用混合粒子群算法確定c和σ,使用最小二乘法(LMS)計算ω。通過將本文算法在鍋爐水循環系統故障診斷中的應用實驗表明,該文算法能夠準群的辨識和判斷故障。
參考文獻
[1] 楊淑瑩,張樺.群體智能與仿生計算——Matlab技術實現[M].電子工業出版社,2014.
[2] 朱凱,王正林編著.精通MATLAB神經網絡[M].電子工業出版社,2010.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00
