基于內存交互的導引頭末制導雷達系統協同仿真
2015-05-30 02:52:19趙東濤黃雁飛
中國新通信 2015年12期
趙東濤 黃雁飛
【摘要】 針對復雜的導引頭末制導雷達系統,采用了Cosim與SPW交互仿真的方法。該方法首先在SPW平臺上建立導引頭雷達在末制導階段系統模型,仿真導引頭在末段攻擊目標的真實環境;然后建立Cosim平臺,由Cosim承擔主調任務,SPW只依照Cosim的命令推進自身仿真流程,并通過內存交互向Cosim反饋仿真數據;最后實時動態的顯示出結果。
【關鍵詞】 導引頭雷達 協同仿真 SPW
一、基于SPW平臺的系統級仿真平臺
導引頭雷達系統由天饋系統、信號處理系統、收發系統、伺服控制系統及結構系統組成,其中天饋系統用于輻射發射功率,接收回波脈沖;信號處理系統接收上位機指令及數據,控制伺服系統及天饋系統運動,并生成各種基準脈沖及波門控制信號;收發系統根據信號處理器產生的控制時序,生成發射信號并接收回波脈沖,產生可供信號處理器提取目標信息的模擬信號;伺服控制系統接收指令角進行天線預定,實現天線波束準確指向所定區域,并克服彈體擾動保證在慣性空間內的穩定;結構系統用于執行精確機械運動。
信號生成系統由初始化模塊、飛控機模塊、計算模塊、目標模塊、雜波模塊和干擾模塊六部分組成。其中初始化模塊用于目標、彈體、信號處理器的初始化;飛控模塊完成與導引頭之間的通信并存儲仿真期間的指令狀態信息;計算模塊計算目標與彈體的位置、姿態并產生三通道中頻回波信號;目標模塊包括目標在寬帶信號照射下表現出的起伏特性、多散射點特性及角閃爍特性;雜波模塊包括導引頭飛行過程中遇到的地雜波和海雜波;干擾模塊包括無源干擾箔條干擾、有源壓制干擾噪聲調頻干擾。
二、基于COSIM平臺的導引頭仿真系統
COSIM平臺負責仿真系統的運行及模塊間的數據傳輸,其功能模塊劃分為SPW模塊、伺服模塊、信號處理模塊以及可視化模塊。其中SPW模塊完成信號生成、天饋及接收系統建模;伺服模塊采用SIMULINK模型來控制天線的轉動;信號處理采用導引頭C語言軟件,建立信號處理器的SPW模型;可視化系統采用COSIM-VE可視化軟件來實時顯示每步解算的結果。
三、仿真流程
仿真過程由Cosim承擔主調任務,SPW只依照Cosim的命令推進自身仿真流程,且及時向Cosim反饋每步仿真數據。系統總體仿真流程如圖1所示,標有序號的步驟屬于需要Cosim和SPW間交互數據的步驟。其中除第5步之外,均屬于SPW等待Cosim給出數據和命令。第5步的情形正好相反。
四、仿真實驗結果
窗口一:主窗口,彈體飛行姿態、過程顯示,航目編隊運動顯示,環境背景顯示;小窗口,顯示天線運動狀況。窗口二:每10個PRT積累后的和通道、方位差、俯仰差三通道回波一維顯示。如圖2所示。窗口三:導引頭信息量顯示窗口,實時顯示角偏差、角速率、彈目距、彈目速、信噪比、信雜比等信息。
如圖2所示。 由上述圖可以看出,可視化窗口顯示出導引頭雷達三通道回波數據、角速率、角偏差、彈目距、彈目速等信息,實現了基于Cosim平臺的協同仿真系統,實現了完整的導引頭仿真模型。
五、結束語
本文在SPW平臺上建立了導引頭雷達目標、環境仿真模型,并將其應用到Cosim平臺,完成與Cosim平臺的接口規范,通過內存中轉方法實現命令數據傳輸,仿真實驗表明該方法穩定可靠,可以大大提高復雜的導引頭仿真效率,具有很強的工程使用價值。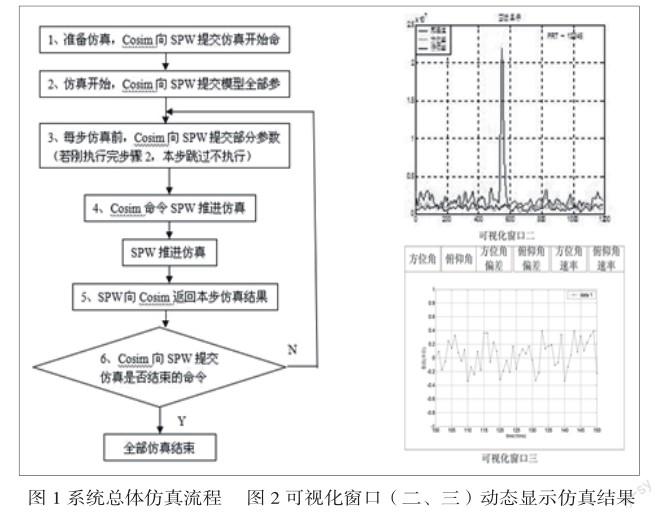
參 考 文 獻
[1] 徐衛 張林讓 唐自新 基于SPW的雷達信號處理系統仿真[J] 計算機工程應用 2003
[2] 朱持恒 李立萍 雷達中頻正交采樣在SPW環境中的實現[J] 實驗科學與技術 2003